中国船舶重工集团有限公司第七一〇研究所 湖北宜昌 443003
摘 要 介绍了基于正六面体结构的磁梯度张量不变量定位方法,针对该方法计算过程中存在椭圆系数导致目标定位误差较大的问题,通过数学推导提出一种改进算法消除椭圆误差,仿真结果表明该方法能有效降低椭圆误差的影响。
关键词 磁梯度张量;不变量;椭圆误差
0 引言
磁梯度张量探测技术是对未知爆炸物(UXO)探测的重要手段,具有重要的军事意义,磁梯度张量定位方法最大的优点就是可以有效的克服地磁场的干扰,提高磁性目标的定位精度。磁梯度张量定位方法可实现对目标的精确定位,但只能在固定平台上对目标进行定位,平台的运动会对定位结果带来很大的干扰。
磁梯度张量不变量是磁梯度张量进行一定的运算得到一些不随坐标系变化而变化的标量,常见的不变量有磁梯度张量的迹、特征值、Frobenius范数等,因为磁梯度张量不变量具有不随坐标系的变化而改变的性质,因此非常适合于移动平台对目标的定位,现已经成为国内外的研究热点。
1 磁梯度张量不变量定位理论
当探测距离大于2.5倍的磁性目标长度时,磁性目标可以视为一个磁偶极子。在此条件下,距离磁性目标r处的磁场可以表示为:
 (1)
(1)
式中, 为磁性目标的磁矩;
为磁性目标的磁矩; 为真空磁导率;
为真空磁导率; 为磁性目标到测量点的距离;
为磁性目标到测量点的距离; 为沿r的单位矢量。
为沿r的单位矢量。
磁场是1个矢量场,其3分量在空间3个方向的变化率即为磁梯度张量,包括9个要素,表达式为:
 (2)
(2)
本文中采用的正六面体磁梯度张量测量系统如图1所示。
图1 正六面体磁梯度张量测量系统结构图
在图1中,坐标原点位于正六面体的中心,三个坐标轴分别垂直穿过对应正六面体平面的中心点,八台磁力仪分别位于正六面体的八个顶点处,磁力仪的三个轴与坐标系的三轴保持一致。通过不同磁力仪的测量值可以求得各个面的磁梯度张量值。
定义磁梯度张量的Frobenius范数为不变量,即
 (3)
(3)
通过计算可知: ,其中,k为椭圆系数。
,其中,k为椭圆系数。
 (4)
(4)
由上式可得, 的方向沿着矢量r反向指向目标,而 可以通过对正六面体的六个平面中心点处不变量的差分得到,令
的方向沿着矢量r反向指向目标,而 可以通过对正六面体的六个平面中心点处不变量的差分得到,令 代表不变量梯度方向上的单位矢量。根据位置关系有下式:
代表不变量梯度方向上的单位矢量。根据位置关系有下式:
 (5)
(5)
式中 代表目标指向正六面体z轴正向对应平面中心点的矢量,对(5)式中的矢量求模得:
代表目标指向正六面体z轴正向对应平面中心点的矢量,对(5)式中的矢量求模得:
 (6)
(6)
由麦克劳林公式,式(6)简化得 ,依次可以求出
,依次可以求出 ,则根据不变量与距离矢量模的关系,有下式:
,则根据不变量与距离矢量模的关系,有下式:
 (7)
(7)
解上述方程,求得
 (8)
(8)
通过上式可以求出磁性目标离测量系统的距离矢量的模,则 即为在正六面体磁梯度张量测量系统坐标系下磁性目标的距离矢量。
即为在正六面体磁梯度张量测量系统坐标系下磁性目标的距离矢量。
采用图1所示阵列对不变量定位算法进行仿真分析,阵列基线长度设为0.5m,目标磁矩(100,0,0)Am2,假设传感器精度足够高,阵列中心为原点建立坐标系,分析目标在z=1平面上时用式(8)计算得到的定位结果误差如图2所示。
图2 不变量计算得到的x轴的定位误差
从图2中可以看到仅在目标相对于阵列中心位置矢量与磁矩矢量垂直时误差较小,在不满足这一条件的定位点误差很大。这是因为在式(4)中对不变量进行求导计算时把k当作定值,忽略了非球面系数k的变化影响。因此求出的单位矢量方向并不是由目标指向阵列中心位置,导致仿真计算得到的定位结果与理论值存在差异。
对磁梯度张量不变量的定位仿真结果分析发现,磁梯度张量不变量定位方法存在非球面误差,即定位结果受磁矩方向与阵列相对目标位置方向的夹角大小的影响。针对存在的非球面误差,通过对磁偶极子模型的几何推导,构造出一个新的不变量,可有效克服非球面误差的干扰。
式(1)可表示为:
 (9)
(9)
式中,令:
 (10)
(10)
其中 为
为 在
在 上的投影,
上的投影, , , 三个矢量共面且满足图3所示的几何关系。
, , 三个矢量共面且满足图3所示的几何关系。
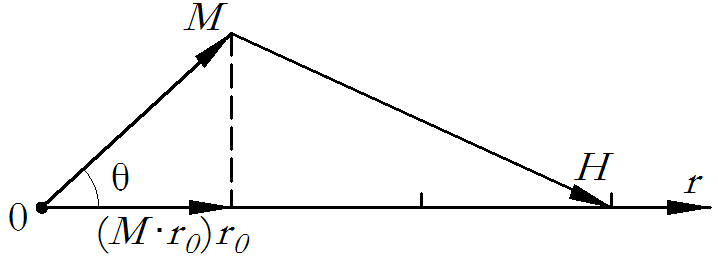
图3 , , 三个矢量的几何关系示意图
设场(r+r0dr)点处的磁场为 ',则:
',则:
 (11)
(11)
从图3中可以看到 = '即:
 (12)
(12)
 (13)
(13)
又
 (14)
(14)
结合(13)、(14)可得
 (15)
(15)
 (16)
(16)
式(16)为单点磁梯度张量定位算法,与理论一致,验证了几何模型的正确性。
在目标位置、磁矩大小不变条件下,分析磁矩方向对目标磁场的影响:由上面的分析可知,目标位置矢量、磁矩方向、磁场方向即
, 求 三个向量位于同一平面,以目标位置方向为x轴正方向, 和 所在平面为xoy平面,z轴垂直向下,构成如图4所示的笛卡尔坐标系。
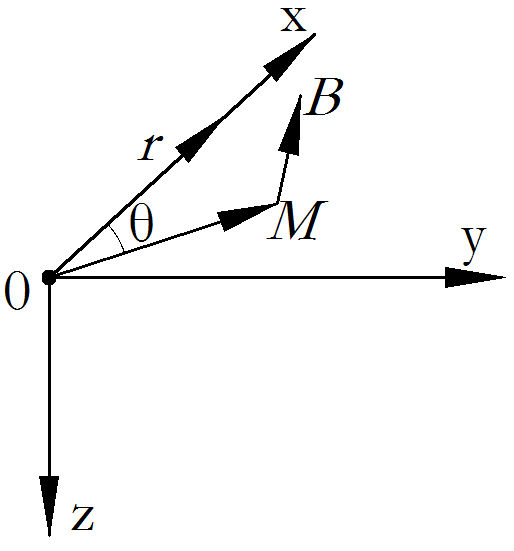
图4 目标位置、磁矩、磁场方向示意图
由对图4的分析可以得到,目标位置矢量、磁矩方向、磁场方向即 , 求 三个向量位于同一平面,即目标磁场方向位于xoy平面,对磁场三分量值根据式(1)求解得到:
 (17)
(17)
 (18)
(18)
取磁梯度张量的Frobenius范数为不变量,即:
 (19)
(19)
对式(1)求导可得磁梯度张量的各个分量值:
 (20)
(20)
求式(20)中G的三个特征值,按照从小到大的顺序排列为 ,
, 、
、 。
。
通过计算得到:
 (21)
(21)
所以,构造与θ无关的不变量D,根据新的不变量构造定位方程,从而消除非球面误差的影响。
同样的采用图1所示阵列对改进的不变量定位算法进行仿真分析,阵列基线长度设为0.5m,目标磁矩(100,0,0)Am2,假设传感器精度足够高,阵列中心为原点建立坐标系,分析目标在z=1平面上时用改进的不变量定位算法计算得到结果如图5所示。
图5 改进的不变量定位算法计算得到的定位误差
从图5与图2原有的磁梯度张量不变量定位效果的对比可以看到,改进后的定位算法得到的定位误差从最大接近2m降低到小于0.2m,定位误差大为降低,因此,磁梯度张量不变量改进算法能够克服非球面系数变化对定位结果的影响。
3 结束语
由仿真实验分析可以看出,磁梯度张量不变量定位的椭圆误差主要由计算得到的目标距离矢量的方向引起,而改进算法可以明显降低了原方法定位误差,大大提高定位精度。可以应用于移动平台对磁性目标的探测,具有很高的应用前景。但仿真仅在理想环境下进行,未考虑磁力仪精度及噪声对测量结果的影响,还需进一步深入研究。
参考文献
[1] Clem. T. R, Sensor technologies for hunting buried sea mines[C]//Oceans. IEEE, 2002:452-460 vol.1.
[2] 张昌达.航空磁力梯度张量测量——航空磁测技术的最新进展[J].工程地球物理学报.2006, 3(5):354-361.
[3] Roy Wiegert, John Oeschger. Demonstration of a novel man-portable magnetic STAR technology for real time localization of unexploded ordnance[C]. MTS/IEEE OCEANS 2007 Conference Proceedings.
[4] R.F. Wiegert, Magnetic Anomaly Guidance System for Mine Countermeasures Using Autonomous Underwater Vehicles [C] Proc. MTS/IEEE OCEANS 2003:2002-2010
[5] Yangyi Sui, Guang Li, Shilong Wang. Asphericity Errors Correction of Magnetic Gradient Tensor Invariants Method for Magnetic Dipole Localization[J]. IEEE 2012, 48(12):4701-4706.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号