【关键词】水下机器人;海洋石油工程;应用
引言
在广阔的海洋中蕴含的各种海洋生物、海底矿产等自然资源非常丰富,而且海洋也是目前世界上非常重要的一种交通运输通道。在进行海洋探索海洋自然资源开发的过程中水下机器人发挥出了重要作用,是不可或缺的一种载体,在海洋活动中具有不可替代的作用。海洋中的石油资源储量非常丰富,在当前进行深水区域石油资源开发的过程中,水下开采设备安装检修难度非常大,而随着水下机器人的出现,完美的替代了传统潜水员的井下作业工作。水下机器人不仅具有较高的性价比,而且作业过程更加安全,能够快速适应各种环境,在海上石油工程中实现了广泛应用。
1 水下机器人概述
水下机器人在目前的海洋探索活动中是非常重要的一种工具。既能够在水下空间中进行随意运动,通过外挂摄像头、障碍声纳以及管线跟踪器等,并通过配置相应的机械手工具,在水下的高效作业。通常情况下水下机器人主要有控制系统、水下潜器、收放系统、脐带缆以及动力系统等几个部分组成[1]。下图1所示为水下机器人系统组成图。
根据水下机器人实际作业能力可以将其分为以下4种类型:第1种属于观察型水下机器人,这种机器人的主要作用是实现水下环境观察,并不能够完成水下作业;第二种是具备了负载能力的观察性水下机器人,这种机器人能够携带一定的设备来进行水下环境观察;第三种属于作业型水下机器人,这种机器人配备了机械手等工具,能够在水下完成相对比较复杂的作业;第四种是爬行类机器人,这种机器人主要有挖沟机以及挖沟犁等。
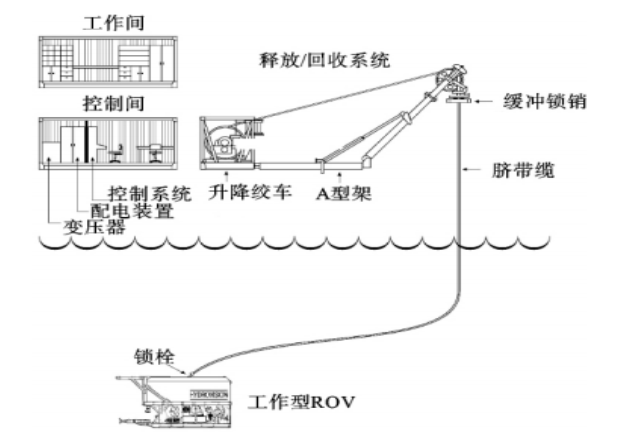
图1 水下机器人系统组成图
2 水下机器人在海洋生物工程上的应用分析
2.1 在导管架安装及相关设施检修中的应用
2.1.1 导管架安装
利用水下机器人进行导管架安装主要涉及了地质勘察、导管架下水、以及安装检查作业等三个部分。① 地质勘察,导管架在实际安装过程中会受到海床水平度的严重影响,在导管架下水之前,首先必须要充分利用水下机器人携带的声呐、USBL水下定位系统以及水下机器人配备的摄像头等对深水中的海床状况进行全面勘查,这样就能够为进一步提升导管架安装位置精度提供保障;② 导管架下水,通过水下机器人、USBL水下定位系统以及水下机器人配备的摄像头等能够让导管架在下水过程中的定位以及固定精度得到全面提升,这样就能够让海洋工程技术目标得以实现;③ 安装后检查,充分利用水下机器人配备的水下摄像头就能够实现对水下导管架的全面检查,对导管架各个部位的实际状况进行系统了解,这样就能够为有效提升导管架安装质量提供保障。在实际的检查过程中,主要涉及到了导管架腿变形、定位销对中状况的检查[2]。
2.1.2 设施检修
属于海洋工程处在海水包围的作业环境下,日常工作环境相对比较恶劣,在实际作业过程中各种作业设备非常容易受到海水的腐蚀作用影响,因此必须要针对各项设施进行定期的检查,以此来全面提升各种设备的运行安全性。而充分利用水下机器人所配备的超声波测厚仪、磁粉探伤仪以及水下摄像头等相关工具就能够实现对,从而充分保证了海洋工程作业的安全性。
2.2 海底管线铺设中的应用
2.2.1 工作内容
充分利用水下机器人能够针对管现在铺设过程中存在的损伤、杂物堆积、牺牲阳极、管线悬挂、注水装置、膨胀环等各种状况实施详细检查[3]。针对不同管线的应急保护电位也能够实现详细的测量。充分利用水下机器人所配备的声纳能够针对管线悬跨长度进行精确测量;针对管线存在的各种缺陷、一场运行状况充分利用水下机器人的摄像头来针对重要部位进行拍摄,就能够对各种状况进行全面了解。
2.2.2 检测方法
针对海底管线充分利用水下机器人就能够实现系统性检查。水下机器人在进行检测的过程中主要是通过了相关的工作人员在工作船上来对其进行控制,让其能够按照指定的路线行情,在检测过程中所采集的各种测量信号充分利用脐带电缆传送到工作船上,这样相关工作人员就能够利用计算机系统对各种测量信号进行精确处理,在此基础上来实现对水下管线运行状况的全面检查。水下机器人在实际开展巡航检查的过程中,利用其机械手上配置的CP探头插入到阳极块中,就能够实现对阳极块电位的准确测量。与此同时,还可以充分利用实时差分GPS定位系统来实现水面上的定位,充分利用其配备的水深定位系统能够实现水下定位,在充分结合计算机计算系统之后,就能够将水下机器人以及工作船之间的坐标进行精确定位。
2.2.3 检测程序
(1)系统准备,首先要正在水下机器人、各种传感器以及相关的设备进行全面检查,并实施严格的校准。
(2)水下机器人释放,通常情况下水下机器人都是在工作船舷侧进行下放,在水下机器人航行过程中可以通过声纳扫描来实现对航行路线的及时调整,在具体获取管线具体位置之后,针对管线的重要部位进行全面检查,充分保证整个管线系统运行正常。
(3)水下机器人巡航检测,工作人员通过工作出来控制水下机器人对管线进行巡航作业,在此过程中,工作人员会沿着水下机器人的巡航路线前进。通过调整水下机器人配备的摄像头,能够让观测角度得到进一步完善,在此情况下,工作人员就能够对管线实际状况以及周边状况进行清晰了解,将管测的损伤、废物堆积、悬挂等各种状况进行全面了解,并通过摄像机观察来进一步明确其具体位置。与此同时还可以充分利用水下机器人配备的声纳进行扫描调整,就能够让管线实际状况以及海底的断面情况进行清晰展示,还能够针对管线的跨越具体长度以及实际的高度进行精确的测量。在整个过程中水下机器人能够实现对摄像信息的全面记录。
(4)电位测量,水下机器人在进行巡航作业的过程中,如果遇到了阳极块或者是水下管线注水装置,就会停止巡航[4]。工作人员的控制之下将机械手上配置的CP探头插入到阳极块或者是注水装置中,就能够实现对管线阳极块以及注水装置阳极电位的精确测量,之后就能够继续进行后续巡航作业。
(5)水下机器人回收,在完成水下管线的巡航检测之后,需要对水下机器人进行回收。而如果在实际的巡航检测过程中发现了问题,也需要及时的回收水下机器人,并做好相应的标记工作。
3 结束语
通过对海洋石油工程中水下机器人的应用进行探讨可以知道,在当前的海洋石油工程开发过程中水下机器人具有非常明显的优势。随着我国海洋石油工程逐渐向着深海发展,水下机器人技术在实现不断的完善和进步,通过在海洋石油工程中不断的推广各种类型水下机器人的应用,能够全面促进海洋石油工程的发展。
参考文献
[1]眭翔. 面向海洋工程水下结构检测的ROV研制及运动控制研究[D].江苏科技大学,2015.
[2]张磊. 基于遗传算法优化的水下机器人路径跟踪模糊控制技术研究[D].浙江大学,2017.
[3]徐国,毛砚辉,于跃,周晓奇,杜路遥,郑卫刚. 浅谈有缆水下机器人在海洋石油工业中的应用[J]. 电子世界,2014(02):102.
[4]纪泽慧. 水下直线目标处理算法在海底管道检测机器人中的应用[D].中国海洋大学,2015.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号