北京工业大学 樊恭烋荣誉学院,北京 朝阳区; 100124
摘 要:近年来,随着机器人产业的发展,爬壁机器人逐渐被发现可应用于高层建筑清洗、救援、墙体探测等人工成本高昂的领域。然而,在技术和成本的制约下,爬壁机器人仍然不能广泛应用于日常生活中。本文尝试将仿生六足和三角步态等地面机器人研究理论,迁移到爬壁机器人的应用中,成功设计了一种基于三角步态的六足爬壁机器人。样机主体采用轻质合金材料以及PCB板,增加了吸附系统同时配以电路系统、控制系统、传感系统,并优化了机器人的移动步态。目前机器人可实现在垂直于地面的不同材料的光滑表面上进行越障爬行。
关键词:爬壁机器人 仿生六足结构 三角步态
引言
爬壁机器人是移动机器人领域的重要分支。目前,爬壁机器人主要用于核工业、石化工业、造船业、消防部门和调查活动,如清理高层建筑外墙,石化领域检查储罐外墙等。爬壁机器人的应用取得了良好的社会效益和经济效益。近年来,小型爬壁机器人已成为机器人领域的研究热点。将地面移动机器人技术与吸附技术相结合,可贴到不同坡度的墙壁上,携带所需工具完成一定任务,大大扩展了机器人的应用范围。我们的团队将地面机器人的算法和结构设计,巧妙的应用于爬壁机器人,提高其稳定性的同时还能通过更改一定参数使其具备转向和越障功能,使其拥有更加广泛的应用场景。
1988年中国首次成功研制采用磁吸附和真空吸附的两个系列机器人,随后上海大学、北京航空航天大学等相继开始关于爬壁机器人的研究研发,成功利用真空吸附设计制造出壁面清洗机器人、全自动擦窗机器人等爬壁机器人[1,2,3]。近年来,爬壁机器人在油罐检测、船舶除锈等工业用途上进展巨大。1996年日本成功研制出利用真空吸附技术的垂直壁面机器人,随后数十年,俄罗斯、美国、日本相继利用吸盘真空吸附研制出多款爬壁机器人[4,5,6]。20世纪90年代初,英国研制出了一种多足行走式的爬壁机器人,日本、美国、西班牙等国家也随后研制出不同形态的“多足”爬壁机器人[7]。多足爬壁机器人有着更好的灵活性和可控性,因此对爬壁机器人的研究重心逐渐转向多足机器人领域。
地面多足爬行机器人往往采取三角步态,其具有较好的行走灵活性和重心稳定性,缺点在于爬行步长较短、速度较慢。我们选择让三角步态应用于爬壁机器人,既保证了爬壁时的重心稳定,也保持了翻越障碍时的灵活性。同时,相对于地面爬行机器人而言,爬壁机器人往往不需要太快的速度,特别是针对高空作业的机器人,稳定性、安全性才是第一要素。因此,三角步态被应用于爬壁机器人,也减小了其速度慢的劣势,有着更科学合理的利用。
目前多数爬壁机器人存在着如下问题:对攀爬平面材料有着特殊要求,体型太小无法负重,吸附不稳定易滑落等。本论文设计了一种采用三角步态的六足爬壁机器人,适用于各种材料的光滑平面,攀爬时重心稳定吸附牢固,可以进行小规模负载,有利于进行高空作业,如高楼玻璃清洗等。通过添加红外传感器等模块,可使机器人实现避障行走。
六足爬壁机器人系统设计
2.1 机械结构设计
在现有条件下我们采用仿生技术,通过模仿可爬壁生物进行结构设计,模型如图1所示。图示的六足机器人的原型每条腿都有3个自由度,六条腿共有18个自由度。该样机原型的具体参数如表1所示。
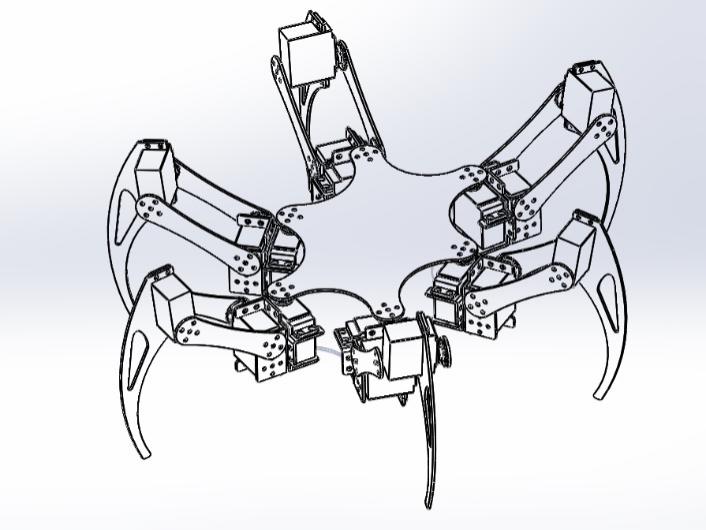
图 1 机器人结构示意图
表格 1 样机参数
| 完全展开尺寸/m | 重量/kg | 速度/(m*min-1) | 自由度 | ||
| 长 | 0.3 | 自重 | 3 | 0.4 | 共18 |
| 宽 | 0.2 | ||||
| 高 | 0.1 | 负重 | 3 | ||
该结构主要通过仿生六足,实现机器人的多向稳定移动,每条仿生足配备三个数字舵机,通过控制数字舵机的转向实现每条腿三个关节的运动,以模拟腿部抬升、腿部伸直、腿部前摆三个基本动作。同时,通过降低主体的高度,简化机身,扩大腿部的折叠长度,可以实现更稳定、更快的运动状态。此外,可以为机器人添加功能部件,例如可抓握的机械夹持器和可用于远程观察和控制的摄像机。
机器人主体部分采用了合金材料,使其能够在负重强度较大的情况下稳定移动,各组件之间通过螺丝连接,通过多孔舵盘将数字舵机与机器人主体框架相连接实现机器人主体结构的搭建。吸附结构与主体的连接件通过吸盘的螺栓实现固定。
2.2 吸附系统设计
现有的机器人的吸附方式大致分为电磁吸附和真空吸附两种,其中电磁吸附对吸附面的材料有着严苛的要求,不利于在普通墙壁上作业,因此我们选择利用传统的真空泵和吸盘方式进行真空吸附。如图2(a)所示,爬壁机器人的足部分由橡胶吸盘作为主体,同时利用连杆将吸盘、真空管、机器人机身相连。
如图2所示,通过3D打印连接件,将吸盘装置与机器人的腿部相连接(a),然后利用真空发生器、真空管和电磁阀组成可控的气路装置(b),再将气路两端分别与气泵和吸盘相连(c),从而实现一个稳定高效可控的吸附装置。

(a) (b) (c)
图 2 吸附结构示意图
对机器人进行受力分析,F是吸附力产生的摩擦力,由摩擦系数μ,吸盘的吸附面积A(cm2),真空压力P(-kPa)决定。G是机器人的重力,与F构成竖直方向上的受力平衡。
样机选择的吸盘直径大小是5cm,真空度约为15kpa,玻璃静摩擦系数取0.8,根据公式F =μ*0.1*A*P,计算得最大的F约为24N。换而言之,一个吸盘理论上可以最大承载24N的重物。基于这个数据,我们选择六足机器人,在运动时保持始终有三个吸盘处于吸附状态,理论上可以产生72N的支撑力,完全可以承载机器人的3kg自重和3kg负重。
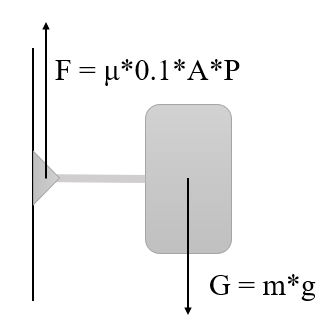
图 3 机器人竖直方向受力图
2.3 电路设计
电路系统主要用于控制真空泵开关与爬行系统相配合达到稳定爬行的功能。在实际设计中,电路系统通过控制继电器,从而控制真空阀,利用真空泵产生的大气压使得气路关闭并形成真空状态,进而吸盘可吸附于墙壁。与此同时,其他“足”通过继电器关闭,气路打开,通过机械结构将足抬起与舵机相配合完成前进状态。整个控制过程中,通过单片机预先设定好的指令进行移动。在已有实验基础上,真空泵功率为1500W,容积18L,可达0.8MPa真空度,足以满足吸盘0.015MPa真空度,可实现吸附墙壁功能。
控制部分以STM32单片机作为核心控制器,接受来自机器人机身的红外传感器数据,控制18路舵机快速平稳运行,实现六足机器人的运动。同时机器人将通过内部ADC模块检测剩余电量,当电量不足时,蜂鸣器发出报警信号,机器人停止工作并吸附在原地。选用继电器控制两组足的吸附或移动状态,当系统发出吸附或移动信号时,继电器连接的真空发生器将被连接或断开,由真空泵充气形成气压从而使吸盘吸附于墙壁上。
选用数字舵机作为驱动源,将特定脉冲信号转换为固定角位移的装置,转动角度可通过实验验证设置为绝对角度;选用大功率航模电池,该电池体积较小,便于机器人负载移动电源,输出电流完全满足18路舵机的供电需求,且成本较低。
六足爬壁机器人步态设计
3.1 三角步态原理
六足动物(或昆虫)行走时,通常不是六足同时直线前进。在通常情况下,六足动物的行走步态相当复杂,我们将其步态进行理想化处理,将机身视为静止的参考体,其足端运动轨迹如图4所示,将六足以头尾分界分为两组,左侧的前后足与右侧中间足为一组,右侧的前后足与左侧中间足为另一组。两组构成了两个稳定的三角形支架,在一个行走周期内,每组足的三个关节以一定角度规律转动使得机器人整体向前移动。一组中的所有足同时提起,其余足吸附在原地作为支撑,依靠提起的足的前后移动来实现整体的向前移动。此后重复前一动作,两组足轮换交替进行。这种行走方式虽然比较缓慢,但是重心低、非常稳定,适合机器人在墙壁上爬行。
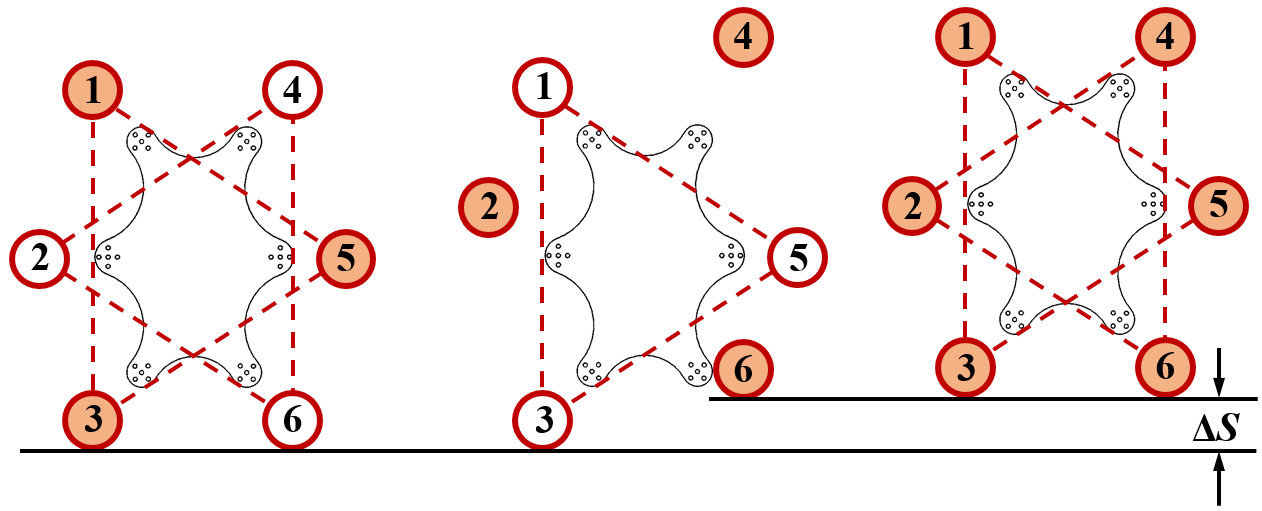
图 4 三角步态原理示意图
3.2 爬壁机器人的三角步态
如图5所示,接触地面的腿用实心圆圈表示,抬起的腿用空心圆圈表示。实心圆圈作为支撑腿,形成了稳定的三角结构,支撑腿复位使得机器人可以向前移动。空心圆圈作为移动腿,通过抬起腿的移动幅度变化,可以控制机器人的前进速度和方向,这种步态可以使机器人在移动的过程中始终保持有三只足吸附在墙壁上,且机器人的重心始终落在三条足形成的支撑区域内,避免左右位移使得机器人不走直线,机器人重心歪斜掉落的现象发生。
以前进方式为例,先以足1、3、5为支撑点,足2、4、6向上提起,向前迈进后放下。放下吸附后,将足1、3、5向上提起,以足2、4、6为支撑点,进行舵机复位,使得机器人前进。再向前迈出足1、3、5,如此往复交替进行便完成了向前行走动作。
以六足机器人的前进动作为例,结合三角步态法原理,机器人前进一步可分为以下八个步骤:
第一步:2、4、6腿排气并抬起;
第二步:2、4、6腿前移;
第三步:2、4、6腿放下并吸气;
第四步:1、3、5腿排气并抬起;
第五步:1、3、5腿前移,同时2、4、6腿复位;
第六步:1、3、5腿放下并吸气;
第七步:2、4、6腿排气并抬起;
第八步:2、4、6腿前移,同时1、3、5腿复位。
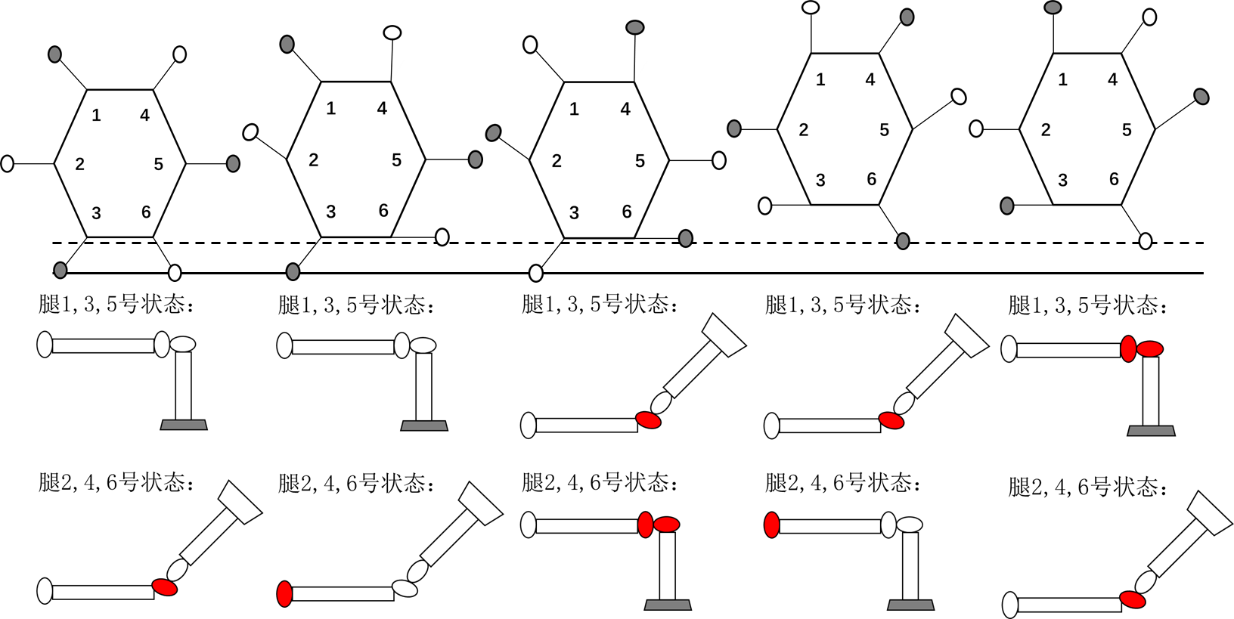
图 5 步态示意图
此外,通过改变前进腿的前摆角度,可以控制机器人朝任意前进方向进行缓慢转向。通过改变抬起腿的高度,并加以传感器探测障碍物距离,可以实现跨越小型障碍。由此可见,三角步态带来的较好的转向功能和跃障功能,在爬壁这一领域也能得到很好的继承,有利于机器人在多种复杂环境下攀爬。如图6所示,机器人每条腿上都配置有两个舵机使得每条腿可以前后左右上下转动,当红外传感器检测到机器人前进方向上有障碍时,系统将会自动将移动步态改变为越障模式,首先利用吸附足将机身撑起一段距离后,移动足增大舵机旋转角度使机器人越过障碍。
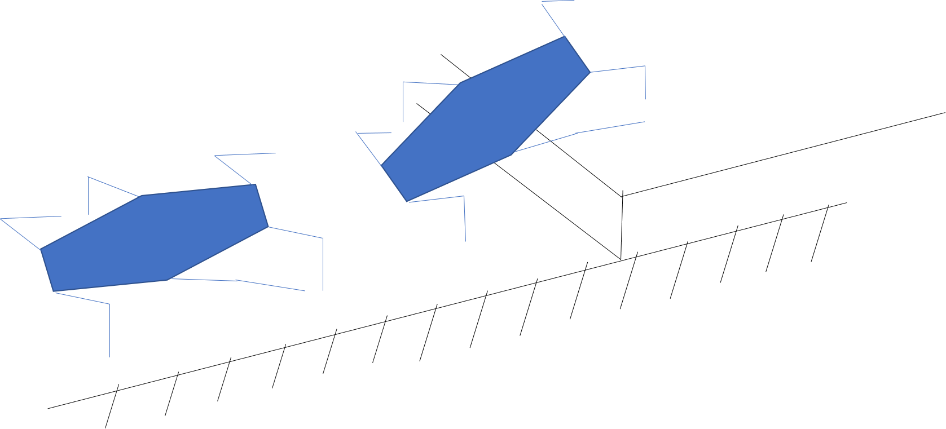
图 6 机器人越障示意图
六足爬壁机器人测试
4.1 机器人壁面系统测试
经过测试,该机器装置尺寸约43*45*20cm,重约2kg,可以实现360度角吸附,可以在垂直于地面的光滑平面上爬行。
在垂直玻璃的爬行测试中,机器人移动稳定,移动负载可达2kg,没有发生脱落现象。每个步态可向上移动6cm,每分钟可进行约10个步态,爬行速度可达约0.6米每分钟。每个爬行步态周期,最大可实现左右30度角转向,可在4个步态内实现机器人整体90度转向。通过携带传感器等外部设备,可实现翻越约5cm高度的跃障。
表格 2 系统测试数据
| 性能 | 参数描述 |
| 步态平均速度(cm/min) | 60 |
| 步长误差(cm/步) | 0.3 |
| 最大转向(度/步) | 30 |
| 翻越障碍高度(cm) | 5 |
4.2 机器人壁面适应性实验
搭建好控制系统后, 为了验证爬壁机器人对不同壁面的适应性, 选择粉刷墙面、玻璃面、金属表面作为实验环境, 如图8。 机器人以不同姿态吸附在壁面时, 机器人能稳定吸附在壁面上。
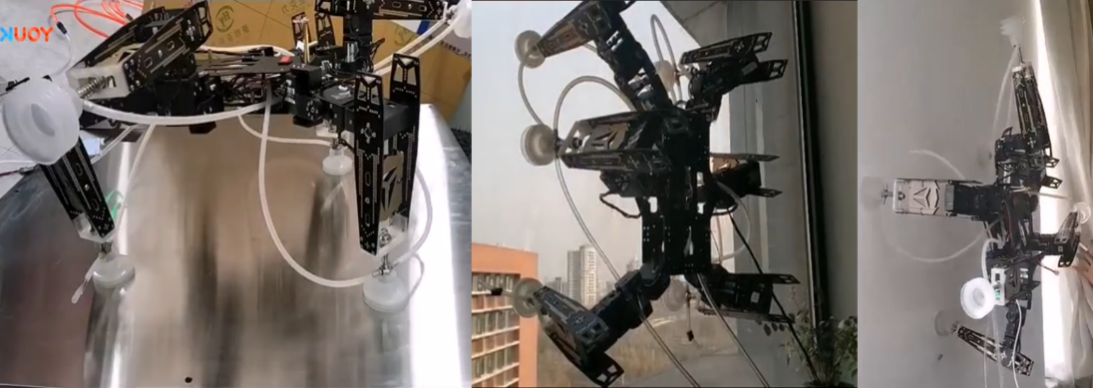
图 6 机器壁面适应性实验
总结及未来工作
该设计巧妙得将仿生六足和三角步态,从地面机器人迁移到爬壁机器人,发挥了该结构和步态的优点,取得了较好的性能实现。相对于同类爬壁机器人而言,该设计可以适应不同材料的光滑平面,兼具运动稳定性和负重量。因此,该设备可以用于难度较大的高空作业,如大楼玻璃清洁等高危工作的应用中。
由于目前舵机的限制,该机器人需要将合理布局气管位置及舵机位置,下一步考虑将舵机转换为小型真空发生器,以扩大机器人灵活活动区域范围并将气管合理固定在机器人机身防止机器人被气管限制,阻碍前进方向。
参考资料
[1] 谈士力,沈林勇,陈振华,龚振邦.垂直壁面行走机器人系统研制[J].机器人,1996(04):41-46
[2] 张厚祥,宗光华.全气动擦窗机器人的实现[J].液压与气动,2001(11):5-8.
[3] 于波,刘荣,张厚祥,宗光华.超高层吊篮式幕墙清洗机器人控制系统的开发[J].计算机工程与设计,2003(03):61-64.
[4] Gradetsky V, Rachkov M, Kalinichenko S, et al.Service robot forcleaning of vertical surfaces[C].In:IARP International AdvancedRobotic Programme Service and Personal Robots:Technologies andApplications, Genova, Italy, 1997:23-24.
[5] Nishi A.Development of wall-climbing robot[J].Computer and E-lectrical Engineering, 1996, 22 (2) :123-149.
[6] Mel Siegel.Remote and automated inspection:status and prospects[C].In:The First Joint DoD/FAA/NASA Conference on AgingAircraft, Ogden UT, 1997.
[7] Luk B L, Collie A A, Billingsley J.RobugⅡ:an intelligent wallclimbing robot[C].In:Proceedings of the 1991 IEEE InternationalConference on Robotics and Automation Sacramento, Clifomia, 1991:3 442-3 447.
[8] 梁忠正,陈玉娟,沈家润,骆淳,陈宇航. 一种新型仿生蜘蛛机器人行走机构的设计研究[J]. 现代制造技术与装备,2016,(09):47-49.
[9] 谢浩. 多足爬墙机器人运动控制及步态规划研究[D].华南理工大学,2015.
[10] 耿逸芃,刘荣. 双足吸附式爬墙机器人方案设计及实验分析[J]. 机电产品开发与创新,2017,30(05):14-16.
[11] Erden M S, Leblebicioglu K. Torque Distribution in a Six-legged[J].Robotics,2007, 23(1):179-186.
[12] Xiao J, Sadegh A, Elliott M, et al. Design of Mobile Robots with Wall Climbing Capability [R]. Monterey: 2005 IEEE/ ASME International Conference on Advanced Intelligent Me-chatronics 2005:438-443.
[13] R. L. Tummala et al. Climbing the Walls[J]. IEEE Robotics and Automation Magazine, 2002,9(4): 10-19;
[14] M.Sitti, R.S.Fearing. Synthetic Gecko Foot-hair Micro/Nano-Structures as Dry Adhesives[J].Journal of Adhesion Science and Technology,2003,17(8):1055-1074.
[15] Sitti M, Fearing R S. Synthetic Gecko Foot-hair Micro/Nano-structures for Future Wall-climbing Robots[J]. Proceedings of IEEE International Conference on Robotics & Automation,2003, 1(8):1164-1170
5 / 5

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



