国网浙江省电力有限公司紧水滩水力发电厂 323000
摘要:随着电厂的不断建设,班组的工作量也是随之增加,任务越来越多;但是班组的人员增加却非常有限,班组成员老龄化现象逐渐凸显出来。这就形成了一种矛盾。另外门机操作都是完全人工操作以及设备本身的绝对误差,所以在精度上存在很大的缺陷;都是靠人工不断的修正来保证,降低了工作效率。所以在充分保证目前系统安全允许的情况下,增加一套辅助控制系统完善目前门机的操作系统。可以保证门机运行的走位精度,提高门机运行的稳定性;提高门机生产的工作效率;辅助系统可以帮助人做简单粗重繁琐的事情,减少人工参与;释放人员参与其他技术价值的事物,也可以减少人员的安全风险。
关键词:250T 自动进槽 可视化 控制辅助系统
目前紧水滩电厂现有的坝顶2*50T门机是某厂于1986年10月投运生产的,已运行33年。门机系统由一套面板操作系统+S7-200系列PLC控制系统组成的核心控制系统。对于门机的行进,检修门吊取、门机行走,检修门入槽都是人工一步步操作及人工一步步确认。
例如门机需要到指点门槽位置是完全由在高空控制塔台的操作人员手动操作控制,再和地上人员配合反复的确认位置。检修门到达指定闸门口时,由3-4个人工操作40吨的坝门推到合适位置入槽。所以纯人工操作存在误差大,人员参与多,工作效率非常低。
这套系统已经是非常的过时,目前国际和国内的自动化科技,智能化科技都非常的成熟。根据国网公司发布的《泛在电力物联网白皮书2019》指导文件非常有必要把二者完美的结合起来已解决当前遇到的问题。
(一)、研发思路:
运用当前的人工智能技术,采用接近开关、编码器、视频监控,电动涡轮丝杆升降机构等运行、检测、定位、监测的信息交互手段,建立一套独立辅助系统,通过以太网连接到原操作系统,保持了原系统独立稳定的运行,也保证辅助系统接入的安全性。
(二)、功能介绍:
坝顶2*50T门机自动进槽及可视化控制辅助系统帮助现有系统实现自动化操作门机各种功能。主要有两大功能:其一是实现原系统的辅助停车功能,其二是实现原系统的辅助落门功能;
具体实现功能有:
1)与原有门机系统都是独立系统,通过以太网建立连接辅助原有系统实现智能自动化操作。门机辅助停车系统是独立系统也是原有系统的扩展延伸。
2)实现触摸屏图形化控制操作。
3)实现视屏实时监控定位。
4)实现位置信号和位置码双重定位和相互检测功能。
5)实现声音提醒和报警。
6)实现系统之间的一键切换功能。
7)实现检修门电动丝杆推动准备入槽。
(三)、系统介绍:
坝顶2*50T门机自动进槽及可视化控制系统主要分两大系统:一为辅助停车系统,其二是辅助落门系统;
具体的子系统分为四个:1)人机交互系统;2)中央控制系统;3)传感定位系统 ;4)顶升机构;
系统流程图如下:
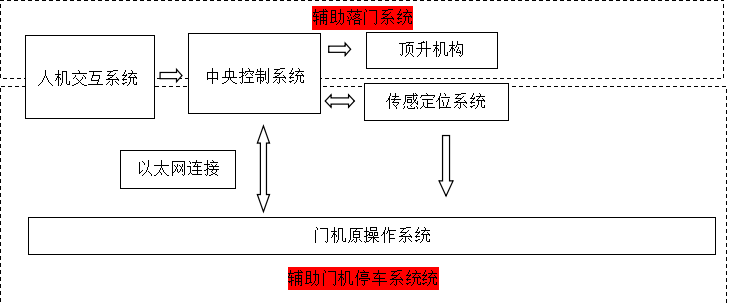
1、人机交互系统:
人机交互系统硬件由10.4英寸触摸屏+2个实时监控摄像头组成硬件系统,软件由门机辅助停车系统和实时视频监控系统构成。
1)功能介绍:
●实时观察门机的运行情况,包括门机的位置信号;
●对门机运行进行实时的门机图像监测
●可以选着半辅助和全辅助;
●快到达门机指定位置时具有声音提醒功能;
●实现一键切换系统功能。
2)辅助停车系统运作流程:
辅助停车系统操作界面如上图,系统分为半辅助和全辅助两种方式。
●半辅助系统:首先将选择开关选择到半辅助。按下所需定位的门号,选中后,按钮下方的黄色长条标志变成绿色。点击开始辅助,距离目标差值显示框将显示目前门机实际位置和所选位置的差值。此时驾驶员按原先驾驶方式移动门机,当到达目标范围内时,系统蜂鸣器将“滴滴滴”鸣响提示,距离目标越近,提示音越急促。同时触摸屏白板信息提示区将提示降档减速信息,直至在辅助系统提示下手动停车。停车成功后蜂鸣器将长响。直到按下取消辅助按钮或延时1分钟后自动停止,大车辅助停车结束。
接下来辅助系统将显示顶杆操作相关信息提示。首先提示操作顶升按钮。当顶升至到预设行程时,系统会提示顶升到位,可以落门。当门下落至门槽时,信息区提示,可以收回顶杆。
至此,本次辅助过程结束。
●全辅助系统:全辅助系统自动完成半辅助系统的大车停车,顶杆顶升到位相关工作。该系统不控制主钩升降。
在任何方式操作时,系统界面上的绿色矩形门机示意图都将根据当前实时位置移动到相应的位置。六个感应开关将显示实时的感应状态。上面三个开关,中间绿色的为停车到位开关,左右两个红色的分别为左减速和右减速开关。下面三个红色开关为位置编码开关,这三个开关将通过6种组合方式识别现在门机的位置,并和矩形门机示意图中的实际位置显示框内的数值比对,确保信号的准确。
实时视频监控图像:
4)参数介绍:
◆触摸屏:
CPU:Cortex-A8 (主频600MHz)
屏幕尺寸:10.2英寸TFT液晶显
显示分辨率:1024×600
触摸屏:四线电阻式分辨率4096×4096
软件:MCGS嵌入式组态软件
2、中央控制系统
连接人机交互系统,采集把板的定位信息和编码器位置信息,进行运算输出,直接控制顶升电机和门机的走位电机。
中央控制系统采用西门子的S7系列1215C型PLC。原有系统是西门子S7 200系列,通过在原系统增加一块以太网CP243模块和现有1215C 进行通讯交互。
3、传感定位系统
传感定位系统采用位置控制及定位的双重检测。既有绝对值编码器检测门机的实时位置,每个门位置又有固定的接近开关组成的位置编码。由位置信号和位置码互相校验,提高系统可靠性。并且可以自动校准编码器检测位置,并弥补因检测轮打滑,转换环节的轻微温飘或其他因素造成的定位误差。
传感定位系统由一个编码器、附从轮和6个接近开关、把板组成。
1)绝度值位置编码器安装于附从轮转动轴上,附从轮则安装在主轮上与主轮联动,不破坏原先主轮的结构。绝度值位置编码器精确的划分大坝的距离信息和定位每个闸口的位置信息。系统会依据编码器的距离位置信息,当进入指定位置前1米区域时,系统会让蜂鸣器产生声音提醒。
2)接近开关和靶板主要作用减速和停车功能。在门机左侧大梁底部安装3个,中间为停车接近开关,左侧为左侧减速开关,右侧有右侧减速开关;门机右侧大梁底部也安装3个位置接近开关。
对于不同作用的接近开关,需要匹配的靶板位置是不一样的。接近开关分为停车接近开关和位置检查接近开关两组。
1.位置控制及定位采用双重检测。
既有绝对值编码器检测门机的实时位置,每个门位置又有固定的接近开关组成的位置编码。由位置信号和位置码互相校验,提高系统可靠性。并且可以自动校准编码器检测位置,并弥补因检测轮打滑,转换环节的轻微温飘或其他因素造成的定位误差。
2.系统相对独立,对原有系统的的影响较小。
在机械上,辅助停车系统对原先门机的影响很小。在机械上仅在原先的设备构件上焊接一小型支架安装接近开关及编码器测量轮。定量顶杆机构先预先组装好一个整体,现场直接一次性配焊。
在电气上,独立设置一套控制采集系统处理新加设备,不涉及原系统。和原先系统的通过以太网通讯完成,不新增控制回路,施工工作量小。
机械及电气系统均可方便的移除。
3.人机界面显示直观,操作方便。
人机界面上可以直观的显示当前门机在坝面上的位置。到达停车区域后,系统发出提示音,随着停车目标的接近,提示音逐步急促,类似于汽车倒车雷达。并且新装两套视频系统,方便观察门槽位置。
4.坝门顶杆机构设计合理
在机械上,检修门顶杆机构用于门机停稳后,落检修门之前前工作。通过顶杆顶出一段距离,使得检修门处于落门的最佳角度。在检修坝门门下放落槽的过程中,检修门会倚靠在顶杆上下滑。摩擦力会对顶杆机构产生一个向下的分力,容易导致伸出的顶杆往下弯曲。在顶杆设计时,端部安装两只低速重载轴承,将滑动摩擦力转换为滚动摩擦力,减少对顶杆施加的向下弯曲力。
在电气上,顶杆动作机构动作时,两侧顶杆同时动作。如果需要微调必须同时按下两个按钮才能实现。这样保证了顶杆一定是同时顶门,避免单一顶杆顶门时受力太大损坏顶杆。
5.现场布置合理,施工量少
新增的电气和机械设备,均安装于门机上。现场不布线穿管,仅安装一些小的位置感应金属板。施工维护方便。
四、总结
运用当前的人工智能技术结合尽现有的门机系统。在保证系统安全的情况下,研制一种由人机交互系统和PLC控制的辅助停车系统是非常有必要,可以完善现有门机系统,提高门机运行的工作效率,减少安全风险,对实际生产起到非常大的帮助作用。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号