中车唐山机车车辆有限公司,河北 唐山 064000
摘要:本文简述了低地板有轨电车雷达防碰撞系统的构成及工作逻辑,阐述了各部件的具体结构及相互之间的关系,并对雷达防碰撞系统的性能参数及系统设计进行了介绍。
关键词:有轨电车;防碰撞;性能
1 引言
低地板有轨电车多数为优先路权和混合路权,线路开通初期因交通信号规则不完善、公众对有轨电车了解不够等原因致使经常发生抢行、在轨道上或轨旁置物等危险现象,致使事故发生。对已开通的沈阳、苏州城市有轨电车运行进行调研,发现在道口或拥挤地区与其他车辆碰擦已成为突出问题。
现有有轨电车制动系统全部依靠司机主观判断调速、停车以及紧急情况的刹车。但复杂环境下,如在大雾霾、雨雪天气、以及黑夜照明不足情况,司机无法准确判断,造成行车安全隐患。因此需要对有轨电车加装雷达防碰撞预警系统,该系统可对周围运动物件和行人进行监测、评估和预警,进一步直接控制车辆制动系统,以完善有轨电车的安全性。
2 雷达防碰撞系统介绍
雷达防碰撞系统由信号发射器和综合处理器构成,安装在车头信号发射器和信号接收器工作时,可以测得前方不同方向的行人和移动物件的实时速度,处理器会计算出障碍物与有轨电车车头的实时变化的距离,通过处理器的判断,分别以显示危险信号、发出预警、制动减速、紧急停车来到达列车的预警和防撞的功能。
2.1 系统构成
有轨电车雷达防碰撞系统主要由车外设备和车内设备组成,车外设备包括毫米波雷达、超声波测距雷达;车内设备包括处理器。
| 序号 | 名称 | 数量 | 备注 |
| 1 | 毫米波雷达 | 1 | 工作频率:77GHz、有效距离250M |
| 2 | 超声波测距雷达 | 2 | 工作频率:40KHz、有效距离4.5M |
| 3 | 处理器 | 1 | 负责对障碍物探测和目标危险性分析,输出制动指令和及报警信号。 |
表1 防碰撞系统构成
2.2 系统功能
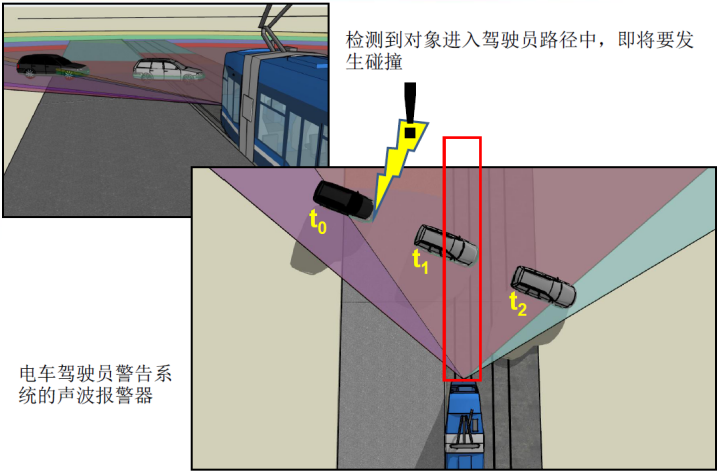
雷达防碰撞系统工作逻辑如下图所示:
当位于车头的雷达探测到障碍物时,将第一时间获取障碍物的速度、与列车的距离等信息,系统处理器则根据当前的列车速度分别计算三种制动方式下列车减速至停止所有的时间及制动距离。如当列车已某种减速度制动时所需的距离为X=V0²/2a,时间为t。V0为列车减速时的初速度,a为列车制动减速度。同时被测物体将纵向方向行驶X1=t*V1,横向方向行驶X2=t*V2。V1为被测物体纵向对地速度,V2为横向对地速度。
因此列车减速到安全停止不和障碍物发生碰撞的安全保障距离应为S0=X+X1。根据以上的方法可以计算出列车安全制动、常用最大制动、紧急制动所需的安全距离分别为S1、S2、S3。
假设此时被测物体与障碍物的实际距离为S,障碍物横向速度为零,则当S1
当 S2
同时,若被测物体的横向速度不为零,则被测物体安全通过轨道所需的时间为t2= W/V2,W为轨道的宽度。在t2这段时间内如若列车不减速将行驶的路程为S4=V0*t2。若S> S4+L,则列车不制动正常行驶。相反列车则根据上述方式计算列车采用何种制动。当列车在制动减速过程中障碍物消失,列车制动缓解。
3 雷达传感器性能参数
有效探测距离 250m
测距精度 1m(有效探测距离范围内)
视角探测范围 近处(≤30米)60°远处(≤250米)20°
测角分辨率 远处(≤250米)0.1°
最小探测面 8cmX10cm
探测对象数据更新周期 80ms
工作电压 DC24V(70%-125%)
工作温度
雷达 -40℃ ~ +85℃
处理器 -25℃ ~ +65℃
4 系统车载处理器性能:
具有数字信号处理和采集的功能;
具有列车速度信息采集功能;
计算障碍物目标大小、相对速度、距离;
具备可同时计算多个障碍物的能力
具备障碍物误报时手动确认清除功能
具有与列车制动系统接口装置;
具备故障检测和自诊断功能;
具有与运行车辆控制系统通讯功能;
具有显示接口、预警声讯接口和制动指令接口;
具有系统切除和启动功能;
提供软件开发环境,方便现场调试;
4 系统设计建议
考虑到列车在运行中的平稳性及安全性,建议将雷达防碰撞系统根据障碍物相对于列车的位置及危险程度,将预警提示分为三级,第一级别为声光提醒,第二级别为系统触发列车常用制动,第三级别为系统触发列车紧急制动。
当系统触发第一级别预警时,系统只进行声光报警提示司机,司机可根据实际轨道上的障碍物情况,自主选择操纵列车制动手柄的制动级位,使列车安全运行通过障碍物。若司机通过瞭望发现预警提示为系统误报,可通过人工确认后消除预警提示声光报警。
当系统触发第二级别预警时,系统主动发出触发列车常用制动并进行声光提示,列车开始进行减速,当障碍物消失后,系统可自主缓解列车制动,司机在进行确认后,方可继续驾驶列车运行。系统触发的制动力大小,应根据障碍物与列车的相对速度及位置触发适合的制动力大小,且触发或缓解制动力时应相对平缓,保证列车上站立乘客的安全。
当系统触发第三级别预警时,系统将触发列车紧急制动,此级别为最高安全级别,一旦触发该级别预警时,列车将施加最大制动力直到列车减速到静止。此级别司机无法进行人工干预,当触发该级别障碍物预警时,系统应能够通过与列车相关接口,发送该预警提示信息,列车在收到该信息后,应通过车载PIS系统广播列车触发紧急制动的原因,及时安抚列车上的乘客。
5 结束语
低地板有轨电车雷达防碰撞系统,通过位于车头处的毫米波雷达主动探测列车运行前方路面的障碍物信息,有效的解决司机驾驶盲区及观察不到位导致列车发生碰撞的问题,进一步完善了有轨电车运行的安全性。
参考文献:
1. 梁影,张庆拙,郑广瑜,黄嘉智 基于雷达探测的有轨电车防撞预警系统 军民两用技术与产品 2018

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号