中航通飞华南飞机工业有限公司,广东 珠海 519040
摘要:根据某型飞机飞行控制系统副翼、方向舵、升降舵及其调整片偏角的测量要求,设计了一套操纵系统参数实时测量设备,介绍了测量设备的主要结构,重点分析了测量设备的工作原理及其构成,该测量设备在实际应用中取得了很好的效果。
关键词:操纵系统;性能参数;实时采集;
飞行控制系统是“一种飞机系统,它包括驾驶员或其他信号源进行下属一项或多项控制所应用的飞机所有分系统或部件:飞机航迹、姿态、空速、气动外形、乘坐品质和结构模态等的控制。”某型飞机的飞行控制系统,主要由传感器、飞控计算机、私服作动器、控制显示装置、检测装置等组成。飞行控制系统按功能可以分为人工飞行控制(操纵)系统和自动飞行控制系统。[1]
人工飞行控制(操纵)系统是指“直接传递驾驶员的人工操纵指令,从而实施飞行控制功能的系统。”某型飞机飞行操纵系统采用了液压助力器,构成了液压助力操纵系统。
 图 1 飞行操纵系统组成框图
图 1 飞行操纵系统组成框图
Fig.1 Flight Control System Block Diagram
在飞机飞控系统总装后测试与试飞定检中,需要测试飞机舵面的转动角度,测试的方法一直在不断发展改进。传统的做法一般采用机械夹具方法,靠重力进行测试,其精度低,人工测试存在主观影响大、效率低、误差大的缺点,并且无法对测试进行实时监测。这将导致飞机舵面性能得不到有效保障,并影响飞机的操作性能。
现在大部件舵面角度测量采用基于角度传感器结合机械结构转动的方法,该方法机械结构复杂,需要专用的传感器支座和连杆传动机构,为提高精度,要求传感器安装精度尽量高,传动机构的机械误差尽量小,传动尽量精确,因此对该机构的安装、调试和使用的难度大,对于大翼面实现更加困难,并要求飞机上有标识定位进行配合,操作极为麻烦。
在总结上述传统方法经验教训的基础上,副翼、升降舵操纵系统采用基于MEMS倾角传感器的测试方法,减少了传动机构,省去了测量时该传动机构的安装和调试步骤,只要简单的安装在翼面,翼面转动轴基本平行于水平面即可,测试操作方法更加简单。而方向舵操纵系统舵面由于是左右摆动,无法采用基于MEMS倾角传感器,在本测试设备中采用基于拉绳位移传感器结合机械结构转动的方法。
本文测量设备中传感器的数据采集系统采用组态软件KingView编制出具有工程实用价值的飞机舵面性能测试软件,该测试软件能实现对测试数据的自动采集、实时显示和存储。
某型飞机为全助力硬式拉杆操纵系统,静态功能试验包括驾驶杆(盘)、脚蹬静态特征参数检查和杆力-杆位移、杆位移-舵面位移的特征曲线绘制。
测试原理
本测量设备主要是由传感器、数据采集器、供电单元、数据处理显示器和传感器固定工装五部分组成的数据采集记录处理系统,该系统采用分布式集中系统(DCS)结构:在座舱、左机翼、右机翼、机尾各配一个可编程控制器(PLC)作为数据采集站,并配置一台笔记本电脑,即上位机对采集站采集的数据进行处理及显示。副翼和升降舵的传感器直接粘贴在舵面指定位置,驾驶舱内手、脚操纵机构和方向舵处的传感器通过工装固定,传感器信号由数据采集站预处理,然后通过以太网传送给上位机,上位机再将数据汇总、再处理,存储、显示等。
试验使用了欧姆龙公司模/数转换模块(AD042)、CPU (CPU31)和PLC供电单元(PD025),驾驶杆(盘)、脚蹬和舵面特征参数通过位移传感器和拉压力传感器经AD042模块转换将电压信号转换为数字信号,这些数字信号经数据处理器传输给上位机,经上位机上的软件进行实时显示、在线保存。
某型操纵系统功能试验测试原理见图2所示。
图 2 测试原理框图
Fig.2 Schematic diagram of the test
传感器工作原理
倾角传感器工作原理
倾角传感器利用单摆在重力场中的受力情况测量倾角,主要用于测量相对于水平面地倾角变化量,通过测量其加速度计算出角度。
倾角传感器内部集成有MCU、MEMS加速度计、模数转换电路、通讯单元等,可以直接输出角度等倾斜数据。
拉力传感器工作原理
拉力传感器是利用弹性体(弹性元件,敏感梁)在外力作用下产生弹性变形,使粘贴在他表面的电阻应变片(转换元件)也随同产生变形,电阻应变片变形后,它的阻值将发生变化(增大或减小),再经相应的测量电路把这一电阻变化转换为电信号(电压或电流),从而完成了将外力变换为电信号的过程。
拉绳位移传感器工作原理
拉绳位移传感器的功能是把机械运动转换成可以计量,记录或传送的电信号。拉绳位移传感器由可拉伸的不锈钢绳绕在一个有螺纹的轮毂上,此轮毂与一个精密旋转感应器连接在一起,感应器是线绕电位器。
测试系统的构建
测试系统由传感器模块、工控机、通讯传输线缆和传感器固定夹具组成。传感器模块包括电源电路、信号调理电路和控制单元,倾角传感器输出的相应模拟量,经信号调理送入控制单元单片机中,在通过RS485总线传输给工控机处理和显示。传感器固定夹具包括驾驶盘传感器固定夹具、方向舵传感器固定夹具和脚蹬传感器固定夹具。
电源模块
电源采用欧姆龙PLC供电单元PD025,DC24V输入,DC5V输出。可通过专用总线从CJ系列CPU单元向每个I/O单元提供稳定电源。
I/O模块
I/O模块采用欧姆龙AD042模拟量I/O单元,用于将模拟量输入信号转换为二进位数据,通过Ethernet端口与控制单元进行数据通讯。
控制模块
控制模块核心选用欧姆龙CJ2M-CPU31,通过Ethernet端口进行数据通讯,可实现快速的程序执行和直接的I/O刷新实现灵活的设备控制。
应用层软件
上位机上运行测量角度的系统软件,开发平台选用测试测量常用的组态软件KingView。
组态软件又称组态监控软件系统软件,是指一些数据采集与过程控制的专用软件。它使用灵活的组态方式,为用户提供快速构建工业自动控制系统监控功能的、通用层次的软件工具,用户通过类似“搭积木”的简单方式来完成自己所需要的软件功能,如数据采集、动态监控、实时动画、数据的导入导出等功能。全面支持画面发布、实时数据发布、历史数据发布以及数据库数据的发布。

图 3 测试软件应用界面
Fig.3 Test the Software Application Interface
传感器固定夹具
测试设备的传感器固定夹具包括驾驶盘传感器固定夹具、方向舵传感器固定夹具和脚蹬传感器固定夹具。
驾驶盘传感器固定夹具由驾驶盘手握点固定座、传感器固定座和手驱动手柄等组成。驾驶盘操纵力通过拉压力传感器进行测量,驾驶盘转角通过角位移传感器进行测量。

图 4 驾驶盘传感器固定夹具
Fig.4 The Yoke Sensor Fixing Tool
图 5 脚蹬传感器固定夹具
Fig.5 The Pedal Sensor Fixing Tool
脚蹬传感器固定夹具由脚踏板固定座和传感器安装座组成。脚蹬操纵力通过压力传感器进行采集,脚蹬位移通过布置在脚蹬立柱上的角位移传感器采集。
方向舵传感器固定夹具用于固定方向舵角位移传感器。夹具布置在方向舵舵面转轴处,传感器轴固定而传感器随舵面一起转动。
图 6 方向舵传感器固定夹具
Fig.6 The Rudder Sensor Fixing Tool
传感器校准项目和校准方法
本测量设备中共包括3类传感器,分别为电压角度传感器、电压输出倾角传感器和拉压力传感器。此处以倾角传感器为例,对校准方法进行简要说明。
校准项目
电流输出倾角传感器的静态角度测试。
校准设备及装夹和接线
静态角度测试中使用的设备包括:SGT-320E三维旋转台、直流稳压电源、PC机、Fluke 8845A/8846A万用表及相关软件。
将被校准的倾角传感器固定在SGT-320E三维旋转台上,使传感器的转轴与旋转台的转轴平行,将传感器电源输入线与直流稳压电源连接,将输出电压线缆与万用表连接。将PC机与三维旋转台和万用表连接。

图 7 倾角传感器接线示意图
Fig.7 The Sensor Wiring Diagram
校准方法和说明
基准电气零位
BWM418倾角传感器接通电源后,控制三维旋转台找出传感器的基准电气零位。
在BWM418倾角传感器测量范围内控制三维旋转台旋转到0°,读取万用表上倾角传感器的输出电流值,输出电流点即为基准电气零位,该传感器电气零位设计值为12mA。
校准点的确定
倾角传感器全量程为0~±90°,该传感器期望线性度>0.1%,将传感器全量程按10°递增的形式设定19个测量点(含零点)。倾角传感器期望线性度>0.1%,则循环数定为3次。
数据采集
以基准电气零位为校准起始点,依次读取各校准点的输出电流值(转换为角度)和三维旋转台给出的角位移值 。角位移传感器在整个测量范围内有19个校准点(含零点),并进行3次循环校准,采集数据见表1,并按以下公式换算为角度
。角位移传感器在整个测量范围内有19个校准点(含零点),并进行3次循环校准,采集数据见表1,并按以下公式换算为角度 。
。
电流输出与角度转换公式:Inclination angle=Sensitivity*(I
out-Ioffset)
Inclination angle:当前倾斜角
Iout: 传感器输出的电流值,单位mA
Ioffset: 传感器零点位置输出电流值(通常为12mA)
Sensitivity: 传感器灵敏度: 传感器灵敏度为传感器倾角变化时对应的电流的变化的比例,BWM418传感器的量程为±90°,对应的电流变化为4-20mA,则传感器灵敏度为:

如果当前输出电流为16mA,则对应的倾角为:


表 1 倾角传感器校准采集数据
Table 1 The Sensor Calibration Data
| 序号 | 转台角度 | 模拟量电流输出(mA) | 转换为角度 | ||||
| 第1次 | 第2次 | 第3次 | 第1次 | 第2次 | 第3次 | ||
| 1 | 90 | 20.0010 | 20.0012 | 20.0014 | 90.012 | 90.014 | 90.016 |
| 2 | 80 | 19.1101 | 19.1098 | 19.1099 | 79.989 | 79.986 | 79.987 |
| 3 | 70 | 18.2210 | 18.2209 | 18.2232 | 69.987 | 69.986 | 70.012 |
| 4 | 60 | 17.3345 | 17.3343 | 17.3346 | 60.014 | 60.011 | 60.015 |
| 5 | 50 | 16.4455 | 16.4432 | 16.4432 | 50.012 | 49.987 | 49.987 |
| 6 | 40 | 15.5542 | 15.5566 | 15.5567 | 39.985 | 40.012 | 40.013 |
| 7 | 30 | 14.6679 | 14.6678 | 14.6656 | 30.014 | 30.012 | 29.989 |
| 8 | 20 | 13.7788 | 13.7765 | 13.7767 | 20.012 | 19.986 | 19.988 |
| 9 | 10 | 12.8877 | 12.8878 | 12.8898 | 9.987 | 9.988 | 9.988 |
| 10 | 0 | 12.0010 | 12.0009 | 12.0009 | 0.012 | 0.011 | 0.011 |
| 11 | -10 | 11.1101 | 11.1122 | 11.1123 | -10.011 | -9.987 | -9.986 |
| 12 | -20 | 10.2212 | 10.2210 | 10.2232 | -20.011 | -20.013 | -19.986 |
| 13 | -30 | 9.3344 | 9.3345 | 9.3323 | -29.987 | -29.986 | -30.011 |
| 14 | -40 | 8.4454 | 8.4456 | 8.4433 | -39.989 | -39.987 | -40.012 |
| 15 | -50 | 7.5544 | 7.5541 | 7.5565 | -50.012 | -50.016 | -49.989 |
| 16 | -60 | 6.6677 | 6.6656 | 6.6655 | -59.988 | -60.012 | -60.013 |
| 17 | -70 | 5.7767 | 5.7763 | 5.7790 | -70.012 | -70.016 | -69.986 |
| 18 | -80 | 4.8876 | 4.8878 | 4.8901 | -80.014 | -80.012 | -79.986 |
| 19 | -90 | 3.9989 | 3.9984 | 4.0011 | -90.012 | -90.017 | -89.987 |
独立线性度计算
BWM418倾角传感器各校准点的偏差见表2。
表 2 校准点的偏差
Table 2 Tolerance Calibration Point
| 序号 | 转台角度 | 第1次 | 第2次 | 第3次 |
| 1 | 90 | -0.012 | -0.014 | -0.016 |
| 2 | 80 | 0.011 | 0.014 | 0.013 |
| 3 | 70 | 0.013 | 0.014 | -0.012 |
| 4 | 60 | -0.014 | -0.011 | -0.015 |
| 5 | 50 | -0.012 | 0.013 | 0.013 |
| 6 | 40 | 0.015 | -0.012 | -0.013 |
| 7 | 30 | -0.014 | -0.012 | 0.011 |
| 8 | 20 | -0.012 | 0.014 | 0.012 |
| 9 | 10 | 0.013 | 0.012 | 0.012 |
| 10 | 0 | -0.012 | -0.100 | -0.011 |
| 11 | -10 | 0.011 | -0.013 | -0.014 |
| 12 | -20 | 0.011 | 0.013 | -0.014 |
| 13 | -30 | -0.013 | -0.014 | 0.011 |
| 14 | -40 | -0.011 | -0.013 | 0.012 |
| 15 | -50 | 0.012 | 0.016 | -0.011 |
| 16 | -60 | -0.012 | 0.012 | 0.013 |
| 17 | -70 | 0.012 | 0.016 | -0.014 |
| 18 | -80 | 0.014 | 0.012 | -0.014 |
| 19 | -90 | 0.012 | 0.017 | -0.013 |
从表2中可以看出,符号交替出现的最大偏差为:

则该传感器的独立线性度为:

该传感器最大偏差 ,小于传感器精度0.02°,独立线性度为
,小于传感器精度0.02°,独立线性度为 ,满足设计使用要求。
,满足设计使用要求。
试验方法
全机共有4台数据采集器,分别采集驾驶舱内驾驶杆(盘)、脚蹬、左副翼舵面、右副翼舵面和尾翼舵面的特征参数。4台数据采集器通过交换机与上位机进行通讯。上位机安装有测试处理软件,对测试数据进行实时显示和储存。
首先,对驾驶盘、脚蹬和方向舵进行上的传感器进行夹具固定,对副翼和升降舵上的倾角传感器进行粘贴,确保传感器旋转轴与各舵面转轴平行。
其次,在驾驶舱、机翼、平尾上布置好数据采集器和供电模块,并将其与各传感器连接,打开电源开关,确认电源信号灯亮起。
最后,连接上位机,确认各传感器链接完成。测量设备布置见图8。
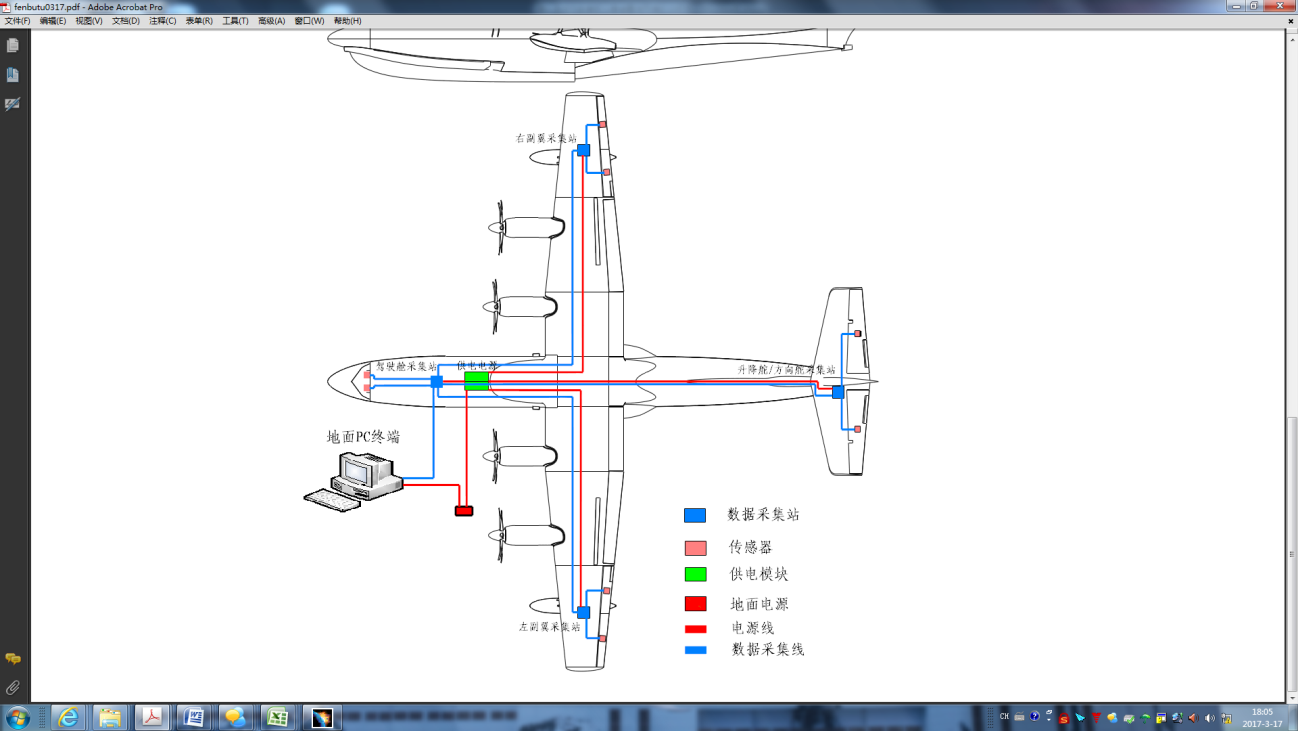
图 8 测试设备分布图
Fig.8 Test Equipment Distribution
性能试验及结果分析
将传感器和相关辅助安装工具在飞机各舵面及机身内布置好后,打开上位机的测试软件,确保舵面在中立位置后,对传感器进行调零。在调零完成后即可对操纵系统进行性能参数的测量。
以副翼操纵系统性能参数测量为例,图9所示为副翼操纵力-操纵位移曲线,从图9(a)中可以读出驾驶盘操纵力和操纵位移的最大值,从图9(b)中可以读出操纵力空行程为4.5°。
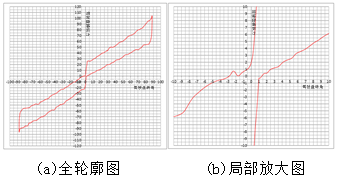
图 9 副翼操纵力-操纵位移曲线
Fig.9 Aileron Force-Displacement Curve
结束语
目前,已利用该套测量设备对001架机飞行控制系统的性能参数进行了测量,该测量设备准确、快捷,其结果与飞控系统的内部测量数据相比误差很小,已达到实际应用、广泛推广的标准。
参考文献
[1] 航空制造工程手册总编委会.航空制造工程手册-飞机装配.
[2] 程凌频.基于倾角传感器的舵面偏转角度测量方法[J].计算机工程应用技术,2015(13)25-26.
[3] 张维胜.倾角传感器原理与发展[J].传感器世界,2002(07):18-21.
[4] GBT 18459-2001 传感器主要静态性能指标计算方法
作者简介
万永义(1984-) 男,工程师。主要研究方向:飞行操纵系统安装及机上地面系统功能试验。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号