燕山大学
摘要:本论文是通过采集赛车跑动在转弯时的一系列信息,包过转向角度,整车速度以及在该速度下的一系列信息,通过搭建神经网络,利用其自学习的功能,在下一次模拟训练当中生成最佳转弯角度,转弯速度,以及该速度下的最佳油门开度的一个大致的范围,并在车手训练时提供给车手。系统在每一次训练当中,通过不断的学习,生成较之更好的转弯条件,使车手不断更新自己已知最佳的转弯因素,使车手的转弯速度不断向最佳的极限靠近。
关键词:神经网络,转弯训练
引言
我们需要输入左右两个轮转角,通过神经网络拟合出最加的内外轮转角之间的关系。搭建神经网络,数据采集后的分析,系统不断生成更佳的方案,采集并分析当前的数据,判断是否为弯道,并根据当前的数据,生成最佳转弯因素,辅助训练系统生成的方案在训练时及时显示反馈给车手,让车手牢记不同的弯道的车手打方向盘的角度、在不同速度情况下的油门开度,使转向更加平稳减少在弯道发生的转向过度与转向不足。
二、简介BP网络
BP算法较为成熟,且应用广泛,因此努力提高该方法的学习速度具有较高的实用价值。BP算法中有几个常用的参数,包括学习率η,动量因子α,形状因子λ及收敛误差界值E等。
BP网络的训练就是通过应用误差反传原理不断调整网络权值使网络模型输出值与已知的训练样本输出值之间的误差平方和达到最小或小于某一期望值。虽然理论上早已经证明:具有1个隐层(采用Sigmoid转换函数)的BP网络可实现对任意函数的任意逼近。但遗憾的是,迄今为止还没有构造性结论,即在给定有限个(训练)样本的情况下,如何设计一个合理的BP网络模型并通过向所给的有限个样本的学习(训练)来满意地逼近样本所蕴含的规律(函数关系,不仅仅是使训练样本的误差达到很小)的问题。
三、实现过程
3.1搜集车手训练数据:如图是一名车手日常训练时方向盘转角与油门开度的相关数据曲线。
 图一
图一
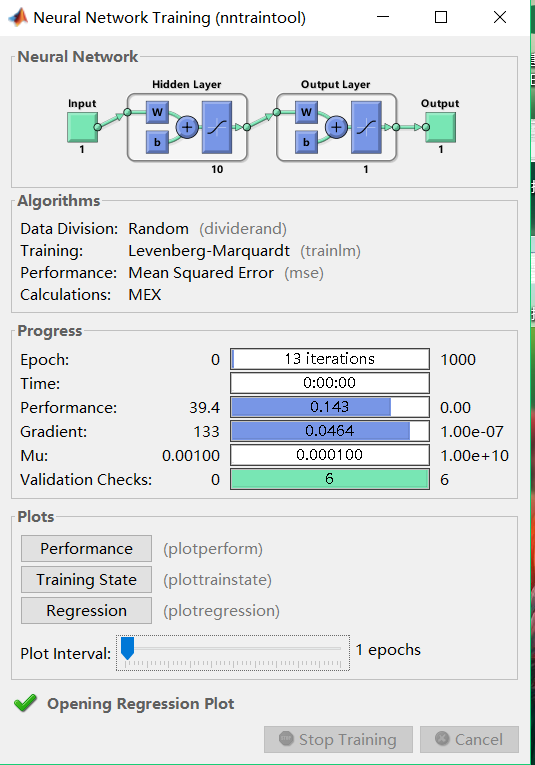
3.2利用MATLAB搭建神经网络。
搭建成功的神经网络,隐含层中有10个神经元,Progress下面的Epoch代表迭代次数,Gradient代表梯度,Vaildation Checks代表有效性检查,最后的绿色对勾代表性能目标达成。如图二所示训练结束后,可以查看分析图形,对这次神经网络调节结果经行展示,我们可以依据该数据进行调节。图四是我们生成的代码。我们需要输入左右两个轮转角,通过神经网络拟合出最佳的内外轮转角之间的关系。
网格结构,所需要设计的神经网络具有一个输入,网络设计的目的是能够使其产生逼近函数非线性输出,所以输出层有一个输出,我们选取一个两层网络的神经模型结构,在隐含层取10个神经元采取双曲正切激活函数,输出层取线性激活函数。
初始化,为了采取反向传播进行有监督的非线性函数逼近,必须给出训练时用的输入与输出,实际系统中遇到对其非线性特性不易表达的情况时,可通过对实际经行输入输出实测数据。
图二
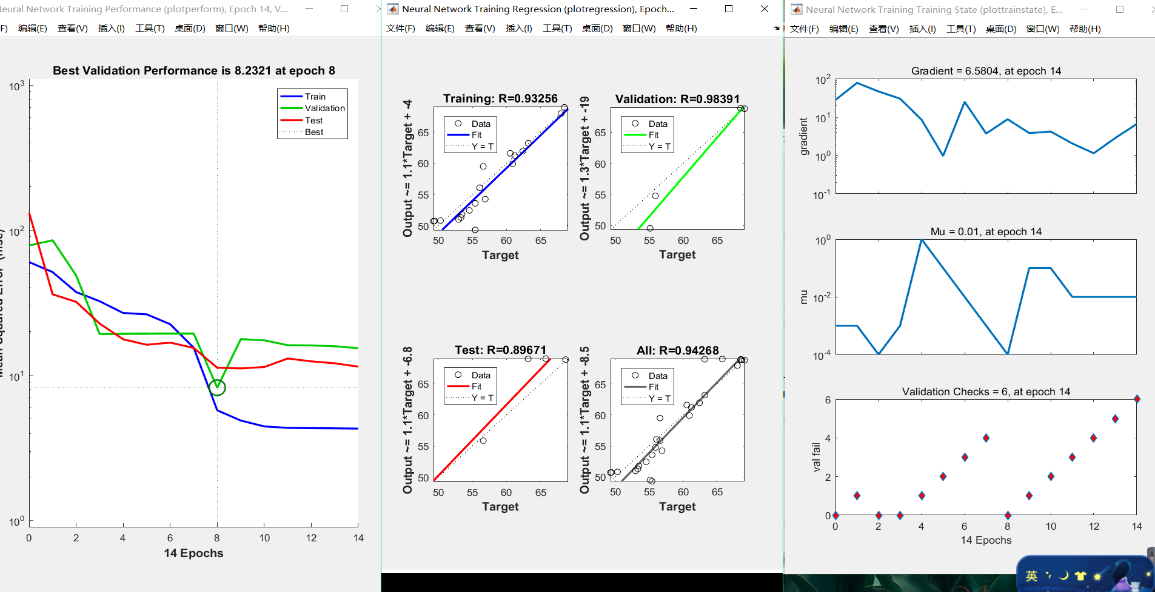
3.3进行仿真。该结果展示了训练与测试数据之间的误差,可以依据该误差对给车手一个反馈以便于车手以一个更好的状态进行训练,以及根据实验数据经行预测拟合,根据程序生成转弯过程车速与方向盘转角的关系。
图三
四、结果分析与意义:
4.1赛车在跑动时转向角度,整车速度以及该速度下的一些信息存在一些关系,通过该系统模拟训练生成最佳转弯角度,转弯速度提供给车手。
4.2减少车手训练时的不确定性,使车手更快的适应转弯时训练,让车手牢记不同的弯道的车手打方向盘的角度、在不同速度情况下手打方向盘的角度,使转向更加平稳减少在弯道发生的转向过度与转向不足。
4.3本文通过对车手训练时的结果进行分析,运用了广为流传的MATLAB工程技术计算语言编程处理,其特点简洁、高效、实用性强。文章最后对仿真结果进行校正,与实际结果相符。对我国的汽车行业日常车手训练起到了保障。
参考文献:
神经网络控制【A】 徐丽娜编
人工神经网络技术及其应用【A】 王洪元 编著

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号