东营职业学院 山东东营 257000
摘要:在逆向工程研究中,点云数据的处理是影响曲面重构精度与效率的关键因素。本文介绍点云预处理方法,包括数据平滑滤波、数据精减和数据插值与拟合。重点对数据的插值与拟合方法进行研究,分别用了克里金插值法、距离反比加权法、最小二乘拟合法、薄板样条法、基函数法,并分析了这几种方法分别所适应的情况,并通过实例来具体分析了几种算法的应用情况,最终得出适合逆向工程中点云数据的处理最优的算法。
关键词:逆向工程 点云数据
1 前言
无论哪一种数据测量方法,对模型测量后都会得到大批的点云,而且任何一种测量方法都不可避免地会出现一些误差,所得到的采样点集并非会完全落在原始物体上;此外,由于众多的测量设备的局限性,要获得物体的完整采样,单纯的固定物体和设备,从一个方向进行采样是不可能的,这就需要在扫描过程中,调整物体位置或者旋转激光头的角度,得到多张视图数据,然后通过点的聚合,对它进行拼接,从而得到完整的采样数据点集。由于上述几种情况的存在,需要对数据点进行平滑滤波、精减,以及插值等预处理,以便于后面进行三维物体的曲面重构。
2 点云数据的处理方法
2.1 数据的平滑滤波
在测量数据的过程中,由于受外界因素的影响,所得数据不可避免的带有噪声;同时也受人为或者一些其它因素的影响,数据中也会带有一些误差,尤其是在尖锐边和曲率变化比较大的区域所测得数据。所以为了使后面的曲面重构结果比较真实地反映原模型,需要对原始采样数据进行平滑滤波处理。
2.2点云的滤波
点云的滤波主要有三种方式:中值滤波法是将相邻的3个点取平均值来取代原始点,实现滤波,因此其消除数据毛刺的效果较好,但是会跟原始数据差距较大,所以本文不选用这种滤波方法;平均值滤波法是将采样点的值取滤波窗口内各数据点的统计平均值来取代原始点,改变点云的位置,使点云平滑;高斯滤波法是以高斯滤波器在指定域内将高频的噪声滤除。高斯滤波法在指定域内的权重为高斯分布,其平均效果小,在滤波的同时,能较好的保持原数据的形貌,因而这种方法被常用。图2-1表示三种滤波方法各自的效果,本文采用高斯滤波法。
(a)原始点集 (b)中值滤波
(c)平均滤波 (d)高斯滤波
图2-1 各种滤波方法比较
3 数据的精减
不同类型的点云可采取不同的精减方式。对于扫描线点云,其中使用较多的有取样法、弦差分法、包围盒法等。取样法根据统计概率的方法随机决定数据去留,其简化程度小,随机误差大;弦差分法利用最大偏差值和最大点间距构成的圆柱形“管道”进行数据筛选,适合于空间散乱数据点的精减;包围盒法用选定的一个四边形或正方形构成一个包围盒,来筛选盒内、外平面或空间数据,其简化速度快,算法简单,但适用于曲面的曲率变化较平缓、附加特征少的情况。
4 数据的插值与拟合处理
在数据测量过程中会造成部分数据的缺失或者稀疏,如果不对这些缺失数据的部分进行处理,则会影响后面曲面的重构。其中包括克里金插值法、距离反比加权法、薄板样条算法、基函数法、最小二乘法等。
克里金插值法是以距离为自变量的变异函数来计算权值,通过设计变异函数,很容易实现局部加权插值,克服了一般距离加权插值法插值结果的不稳定性,但其采样数据必须满足变异函数的假设条件及其结构特征的描述。
距离反比加权法是常用的空间插值方法之一,是一种全局插值方法。它的计算值易受数据点集群的影响,计算结果中常出现一种孤立点数据明显高于其周围数据点的现象。因此在插值过程中,使用最优邻域以保证待插值点有足够的参考点。与其它几种方法相比,距离反比加权法的效率较高,在插值过程中所需的存储空间也很小,此方法较常用。
薄板样条算法是一种平滑的空间映射算法,它有很多的优点,目前在许多领域都有应用,因为其数学理论已经非常完善,其解不仅存在且是唯一的,并且是闭合形式的;另外,它计算简单、方便、稳定性强。但是薄板样条的精确度受所选的标志点集偏差的影响,如果标志点的选取偏差大,则效果不是很好。
基函数法的运算简单,且实现起来比较方便,因此在数学领域和计算机领域都有广泛的应用。
最小二乘法是曲线拟合的重要方法,计算简单,在散乱点数据插值与光滑等众多领域都有广泛的应用。
5 应用结果比较
本文将上述插值和拟合的方法分别用程序实现,并对结果进行了比较。用上面几种方法重构出图2-2和图2-3所示模型。平板模型的特点是曲面曲率变化不大,表面特征比较平缓; 而兔子模型的特征是曲率变化大,表面起伏较大。
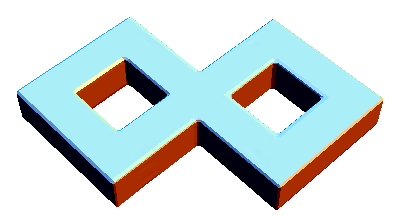
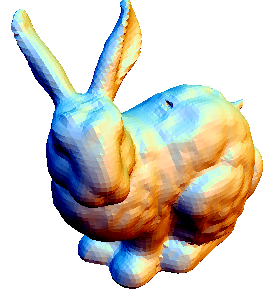
图2-2 重构后的平板模型 图2-3 重构后的兔子模型
对图2-2,分别用上述几种算法实现重构后,有如下表2-1所示结果:
表2-1几种算法对平板模型重构后的比较结果
算法 | 所用时间(s) | 函数调用 | 单元数 |
克里金插值 | 8 | 20517 | 6681 |
距离反比加权 | 7 | 20517 | 6681 |
基函数 | 8 | 20517 | 6681 |
薄板样条 | 8 | 20517 | 6681 |
最小二乘法 | 7 | 20517 | 6681 |
对图2-3,用上述几种算法实现重构后,结果如下表2-2所示:
表2-2 几种算法对兔子模型重构后的比较结果
算法 | 所用时间(s) | 函数调用 | 单元数 |
克里金插值 | 17 | 39637 | 17497 |
距离反比加权 | 14 | 39637 | 17497 |
基函数 | 14 | 39637 | 17497 |
薄板样条 | 15 | 39637 | 17497 |
最小二乘法 | 13 | 37527 | 16793 |
通过上面两个例子的实验结果,可以得出这样的结论:在对曲面曲率变化不大的情况下,几种算法的性能相差不大,除了距离反比加权算法和最小二乘算法所用的时间比其他算法的快一秒外, 其他几样指标都一样;而对曲面曲率变化较大的模型进行重构时,最小二乘算法存在明显的优势,所用时间最少,函数调用和八叉树细分单元数也是最少的,其次就是基函数法和距离反比加权法,它们在运行时间上比克里金法和薄板样条法都少。
本文的主要工作是进行了点云的预处理,主要有数据平滑滤波、数据精减和数据插值与拟合。重点是数据的插值与拟合方法,分别用了克里金插值法、距离反比加权法、最小二乘拟合法、薄板样条法、基函数法,最后本文分析了这几种方法分别所适应的情况,并通过实例来具体分析了几种算法的应用情况,最终得出适合本文的最优的算法。
参考文献:
[1]赵越,吴初汉.基于OpenGL的双三次B样条曲面分类与实现[J].实验科学与技术:2007,6(3)47-51
[2]赵彤,吕强,张辉等.三次均匀B样条曲线高速实时插补研究[J].计算机集成制造系统:2008,14(9)1830-1836
[3]潘海鹏,周天瑞,胡世飞.STL数据模型可视化的实现[J] .塑性工程学报:2006,13(6)94-98
[4]李清泉,李德仁.三维空间数据模型集成的概念框架研究[J].测绘学报,1998,27(4): 325-29
[5]李海洋,范文义,李明泽.二维地图与三维虚拟场景交互技术的研究与应用[J] .东北 林业大学报,2008:36(11),92-94
作者简介:穆绍山,东营职业学院讲师,硕士,男,1973年,研究方向:职业教育教学研究、企业信息管理、计算机应用技术.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



