华东师范大学第一附属中学 200086
摘要:
针对高中通用技术学科闭环控制教学中的困惑,从试验对比感悟闭环控制思想、根据控制对象需要理解闭环控制要求、数学模型分析理解闭环控制中消除偏差值含义、类比方法启发学生闭环控制与设计学习五个方面,由浅入深、循序渐进让学生领悟闭环控制的思想内涵和实际应用价值,以提升学科核心素养。
关键词:通用技术 闭环控制 单片机
背景
控制在我国导弹控制、航天卫星控制、海洋资源载人潜水器控制、机器人控制等众多的领域有广泛的应用,控制作为《普通高中通用技术课程标准(2017》中要求的高中生学习必须内容,是提升学生学科核心素养的重要内容。控制技术是一个不断发展的过程,包括机械控制、电子控制、单片机控制等方式,目前正向于人工智能控制方向发展,其内容是很丰富的。新课标要求学生掌握开环控制和闭环控制两种方式,然而由于上海市高中劳动技术教材并没有出现开环控制与闭环控制相关内容,一时激起了广大一线教师们的热烈讨论,并尝试进行了教学尝试。有的老师以“烤面包”案例引出开环与闭环控制概念,然而由于缺乏直观的体验,学生难以真正理解闭环控制中负反馈的调节作用;有老师认为高中教材原有的光电循线小车项目就是闭环控制系统,理由是小车在闭环中不断实现循线任务,并认为带有传感器的控制系统一般都为闭环控制系统;也有老师提出不同意见,说自动控制门有传感器但它应为开环控制;还有的老师从“偏差值”角度认为闭环控制一定要消除偏差值,光电循迹小车没有消除偏差值运算过程,因而不是闭环控制系统。可见老师们对闭环控制教学存在较大的分歧,笔者在单片机自动控制技术教学中也有一些思考,并进行了如下教学实践。
通过试验对比感悟闭环控制思想
 笔者认为之所以造成对闭环控制认知上的分歧,主要原因忽视了闭环控制概念来自丰富、具体的控制实践的抽象概括,若仅仅从闭环控制概念上去理解闭环控制,对于高中生来说是极其困难的,因此必须让学生在具体实践案例中,以直观的方式让学生逐步去感悟闭环控制思想。笔者以开环、闭环控制对比试验的教学方式,创设真实的问题情境,让学生设计一辆可自动分发材料的智能循线小车,并提出了小车在暂停区暂停3秒的设计要求。 学生在经过硬件制作和软件设计后,进入实际场地调试时,却发现了一个问题,小车暂停3秒后,没有离开暂停区域,而是直行后仍然在暂停区检测多次,经师生讨论分析,认为问题的原因主要是原有控制流程存在缺陷,即小车直行后并没有离开暂停区域,而单片机再次检测到暂停区域。笔者抓住这个机会,让学生讨论如何解决这个问题。
笔者认为之所以造成对闭环控制认知上的分歧,主要原因忽视了闭环控制概念来自丰富、具体的控制实践的抽象概括,若仅仅从闭环控制概念上去理解闭环控制,对于高中生来说是极其困难的,因此必须让学生在具体实践案例中,以直观的方式让学生逐步去感悟闭环控制思想。笔者以开环、闭环控制对比试验的教学方式,创设真实的问题情境,让学生设计一辆可自动分发材料的智能循线小车,并提出了小车在暂停区暂停3秒的设计要求。 学生在经过硬件制作和软件设计后,进入实际场地调试时,却发现了一个问题,小车暂停3秒后,没有离开暂停区域,而是直行后仍然在暂停区检测多次,经师生讨论分析,认为问题的原因主要是原有控制流程存在缺陷,即小车直行后并没有离开暂停区域,而单片机再次检测到暂停区域。笔者抓住这个机会,让学生讨论如何解决这个问题。
大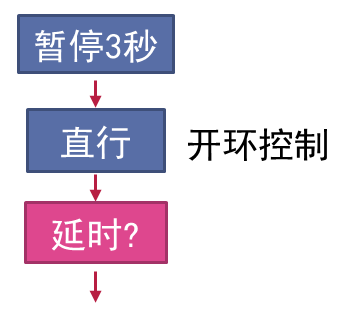 部分学生认为可在原有控制流程图中直行后增加延时时间,让小车直行离开暂停区后继续循线。
部分学生认为可在原有控制流程图中直行后增加延时时间,让小车直行离开暂停区后继续循线。
新的问题又来了,如何确定延时时间了?有学生说先大致猜测一个时间,然后通过调试找出合适的时间;也有同学说运用数学课所学二分法,用500毫秒、250毫秒、125毫秒等去调试,直到找出合适的延时时间;还有同学说可用物理的方法,先求出小车运动平均速度,然后将暂停区域标志线宽度除以平均速度,计算得出小车直行延时时间。
笔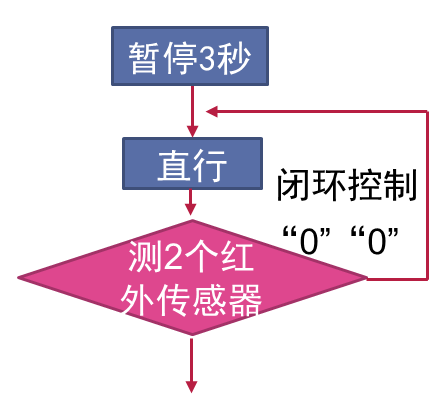 者首先鼓励了这些学生综合应用各学科知识去思考解决实际问题的办法,然后指出这是通过预设的输入延时时间去控制被控对象电机的工作,这是一种开环控制的思想,并让学生思考小车运动的惯性、电池电量等干扰因素是否会影响预设时间的控制精度,学生们马上意识到开环控制有控制不够准确的特点,这时候教学自然的进入到闭环控制学习,笔者问除了以预设时间开环控制方式外,还有别的方法吗?追问小车离开暂停区域的标志是什么?有学生指出只要小车底部的2个循迹传感器检测到的信号都是低电平时,表示小车没有离开暂停区域。笔者这时候才引入闭环控制:闭环控制利用检测装置(一般为传感器),将被控对象的输出量与预设的目标值比较,如果没有达到目标,控制被控对象会一直工作直到实现目标,闭环控制是非常重要的控制思想,不仅在技术自动领域有应用,在生物领域、社会领域、经济领域等也有应用,从而引起学生对闭环控制学习的兴趣,并得出闭环控制流程图。
者首先鼓励了这些学生综合应用各学科知识去思考解决实际问题的办法,然后指出这是通过预设的输入延时时间去控制被控对象电机的工作,这是一种开环控制的思想,并让学生思考小车运动的惯性、电池电量等干扰因素是否会影响预设时间的控制精度,学生们马上意识到开环控制有控制不够准确的特点,这时候教学自然的进入到闭环控制学习,笔者问除了以预设时间开环控制方式外,还有别的方法吗?追问小车离开暂停区域的标志是什么?有学生指出只要小车底部的2个循迹传感器检测到的信号都是低电平时,表示小车没有离开暂停区域。笔者这时候才引入闭环控制:闭环控制利用检测装置(一般为传感器),将被控对象的输出量与预设的目标值比较,如果没有达到目标,控制被控对象会一直工作直到实现目标,闭环控制是非常重要的控制思想,不仅在技术自动领域有应用,在生物领域、社会领域、经济领域等也有应用,从而引起学生对闭环控制学习的兴趣,并得出闭环控制流程图。
最后安排试验活动,让学生分组进行开环控制与闭环控制对比试验,让他们在实践中感悟两种控制方法的不同,体验传感器装置在闭环控制中的检测作用
在学生初步了解到闭环控制和开环控制的不同后,笔者进一步让学生去判断小车循线过程是闭环控制还是开环控制?一开始大部分学生不知道如何判断,笔者意识到可能小车两个电机作为控制对象造成判断上的困难,于是启发学生将小车单个电机作为控制对象来分析,经讨论,学生们认识到小车循线其实是两个闭环控制系统,每个闭环控制系统中,寻找黑线是目标,循迹传感器是检测装置,电机是控制对象,循线传感器没有检测到黑线时,控制电机继续转动,相反检测到黑线时,控制电机就停止,两个闭环控制系统交替工作,从而达到小车自动循迹功能。通过这样分析,大家才真正理解了小车自动循线的工作过程,也让学生深入到技术“物”的层面感悟到闭环控制的魅力。
根据控制对象需要理解系统控制的要求
在完成自动分发材料小车后,有学生提出问题:在科技比赛中,循线速度都很快,我们的小车速度太慢,怎样才能提高小车循线的速度呢?笔者表扬这位学生从控制的快速性角度,即消除输出量与输入量偏差的快慢程度提出了一个很好的问题,并让同学展开讨论:有学生说将小车电机换成速度快的电机,就可以提高小车循线速度;也有学生说如果小车速度快可能会影响小车循线的稳定性,从而容易脱离轨道。从学生的回答中可以看出学生有对闭环控制深入学习的愿望。
笔者首先指出稳定性、精确性和快速性是控制系统的三个基本要求,这三个基本控制要求之间有时是矛盾的,例如小车循线控制的快速性和稳定性,从控制角度来说是一对矛盾。这就需要运用工程思维在控制要求之间进行权衡选择,如何权衡?要联系实际问题具体分析,并让学生思考科技比赛竞速循线小车、数控机床加工零件和自动分发材料小车控制对象要求,经过思考,学生认识到竞速循线小车以追求速度为目标,应该侧重控制系统的快速性;数控机床加工零件对零件有质量要求,应该侧重控制系统的精确性;而我们小车在教室中使用要考虑学生安全,应该侧重控制系统的稳定性。笔者进一步指出在确定主要的控制要求外,其它两个控制要求也要兼顾,以培养学生系统性思维,最终共同得出了控制要求:在确保小车稳定循线的基础上,小车直行时速度加快,弯道小车速度要慢,如果前方有行人,小车应该避障停止下来。甚至有学生提出,还可以让小车主动绕开障碍物后继续循线,笔者又进一步让学生从开环控制和闭环控制两个角度去思考解决的方法,旨在让学生拓宽控制系统的学习视野,从而更好的领悟闭环控制。
从数学模型分析理解闭环控制中的消除偏差值含义
闭环控制的另一种形式是通过负反馈来减少被控量(输出量)与预设量的偏差值,例如交通路口红绿灯自动控制系统,能根据车流量大小改变红绿灯时间,这种闭环控制方式相比小车自动离开暂停区域的闭环控制更为精准,事实上,大部分闭环控制概念是将两种闭环控制结合起来描述,例如:闭环控制系统输出对输入有影响,核心是通过负反馈消除偏差值,结合起来的闭环控制概念对学生来说是难以理解的,为此笔者进一步以竞速循线小车为例,从数字模型分析促进学生对闭环控制系统中消除偏差值含义的理解。首先分析数字式循线传感器信号的检测的特点(预设值高电平与检测信号的高、低电平简单比较),然后介绍模拟循线传感器信号检测特点(将物理信号转为0~5V的电压值),再介绍了单片机模数转换A/D技术(将0~5V电压值量化为0~1023数值),最后让学生去思考如何根据预设值与当前值的偏差去控制小车循迹运动。经过讨论,学生们恍然大悟,意识闭环控制消除偏差值就是指模拟传感器预算值(例如500)和当前检测值的偏差,而根据不同偏差值控制电机的不同转速就能更为准确的控制小车循线,当偏差值大时表示小车偏离轨道大,小车转速应该快些;当偏差值小时表示小车偏离轨道小,小车转速应该慢些。笔者进一步启发学生联系已学得物理知识,从距离与速度的关系去确定输出与输入的数学模型,并在实践调试找出数学模型中的偏差值与电机控制的比例参数。
五、类比的方法启发学生控制设计学习
在学生完成了自动分发材料的智能车的学习后,为拓宽学生应用视野,以类比的方法启发学生进行闭环控制与设计学习,列举自动跟随主人的旅行箱、汽车跟随控制大灯、雷达跟随控制系统等,启发学生思考,跟随控制还可以用在什么地方,有学生提出可设计一辆自动跟随课代表的智能收送作业的智能车,以方便课代表收发作业本,也有同学提出可设计声音自动跟随的话筒,实现一个话筒多人共享,以节约资源,也有学生提出为特殊人群设计跟随目光自动翻书的装置。
结束语:
高中通用技术教学中的闭环控制有着丰富的思想内涵,仅从概念上是难以理解的,因此教学应在项目载体教学中提炼出真实的问题情境链,并基于学生认知特点,循序渐进、从直观到抽象在分析问题、解决问题的过程中让学生由浅入深的去理解其思想内涵。
参考文献
《普通高中通用技术课程标准》.人民教育出版社,2017
《上海市中小学劳动技术课程标准》.上海科技出版社,2007
《通用技术-技术与设计2》.江苏教育出版社,2013
《高二劳动技术教材》.上海科技教育出版社,2016
地址:上海市虹口区虹关路88号 邮编:200086 联系方式 13818899519 邮箱:97141047@sina.com

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



