河南中烟工业有限责任公司安阳卷烟厂 河南省安阳市 455000
摘要:本文主要介绍了新型物料粒度测量系统的称重系统的组成,建立了称重系统的数学模型,利用MATLAB里面的Simulink建立了称重系统的仿真模型,设置了仿真参数,进行了仿真,并对仿真结果进行了分析,得到了一些有益的结果,大大缩短了采样时间,提高了工作效率。
关键词:物料粒度;测量;称重系统;数学模型
0 引言
在钢铁冶炼行业,良好的物料透气性能使物料的物理和化学反应更加充分。这关乎到炼铁的质量和效率,因此需要对进入高炉的返焦返矿物料进行粒度检测。这是近年来国内外冶金行业普遍关注的重点技术之一。为此首钢京唐公司委托郑州大学机械工程学院和四达有限公司,研制一套新型物料粒度测量系统。本文对新型物料粒度测量系统的称重系统进行了理论分析和数学建模仿真,得到了一些有益的数据,对什么时候进行数据采集起到了指导作用。
1 新型物料粒度测量系统的称重系统简介
新型物料粒度测量系统主要有取样、筛分、称重、电气控制等系统组成。其中称重系统主要由称重传感器、重量显示仪表、称量斗、接线盒、信号隔离器等组成,其作用是准确称出对应称量斗中物料的重量,重量值上传至PLC。
2 新型物料粒度测量的称重系统的数学模型
新型物料粒度测量系统的称重系统主要由称重传感器、接线盒、信号隔离器、称重仪表等组成。称重系统可以简化一个如图1所示的一个由弹簧,阻尼器组成的二阶系统[3,4]:
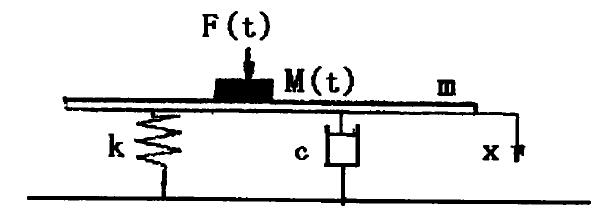
图1称重系统力学模型
对称重系统的力学模型进行分析可得:  (1)
(1)
式中,M(t)—物料的质量;
m —称量斗的质量值;
c —阻尼系数;
 —刚度系数;
—刚度系数;
 —称重系统的位移;
—称重系统的位移;
 —重力加速度;
—重力加速度;
 —物料下落的冲击力;
—物料下落的冲击力;
式(1)表明了位移x和物料的质量M的关系。由于位移x在被传输到称重仪表上时,会在称重仪表里面进行信号放大、A/D转换,最后在称重仪表上显示的是电压信号V,因此式(1)也表明了电压V与质量M的关系。
传统的控制理论无法对该称重模型进行分析,目前也没有更好地处理分析方法。所以只能对其进行分段线性化处理。采用分段线性化法,可以认为系统是一个线性时不变系统[1]。在一个很短的时间间隔内,可以假定下落在称体上的质量M不变,F为常数,则式(1)变为
 (2)
(2)
令G=Mg+F,则
 (3)
(3)
这就是系统的静态数学模型,设系统的初始状态为零,对式(3)做拉普拉斯变换得
 (4)
(4)
 (5)
(5)
令 ,
,
则有
 (6)
(6)
其中 ,
,
在实际的测量过程中,物料不断落下,M是随时间不断增加的,可以看成为一斜坡信号[4]。由于M是不断变化的就导致了系统的数学模型也是不断改变的。 ,
, 也随之变化,并且随M的增加而不断减小,系统是一个时变非线性系统[6,7]。
也随之变化,并且随M的增加而不断减小,系统是一个时变非线性系统[6,7]。
3 基于Simulink称重系统仿真模型
由于落在取样小车里面的物料质量M(t)是一个斜坡信号,考虑到实际物料下落的速度大致为4kg/s,落在称体上的物料冲击力大致相当于4kg物体的重量,因此输入信号可写为[8,9]:
 (7)
(7)
由上一小节分析可得到新型物料粒度测量系统的称重系统的状态方程为:
 (8)
(8)
下面将根据此称重系统的状态方程建立此二阶系统的模型并进行仿真分析。
首先根据状态方程,选择对应的系统模块进行系统建模。这里所使用的系统模块主要有[2]:
(1)Sources模块库中的Ramp模块:用来作为系统的输入信号。
(2)Math模块库中的Add模块:用来组合信号。
(3)Continuous模块库中的Integrator模块:用来对信号进行积分。
(4)Math模块库中的Gain模块:用来实现信号的增益。
(5)Sinks模块库里面的Out1模块:用来作为系统的输出信号。
(6)Sinks模块库里面的Scope模块:用来显示信号。
图2所示为新型物料粒度测量系统称重系统的系统模型。

图2称重系统系统模型
在该称重系统中需要用到三个弹簧,并且三个弹簧是并联,所以总刚度k=3k0=480.24N/mm,c=59.428Ns/m,G=Mg+F=39.2N,m=5kg。
称重系统模型框图建好以后,需要合理的设置系统中各模块的参数。这里的采用的模块参数设置如下所述:
(1)Ramp模块:其参数设置为4,如图3所示。
(2)Gain模块:其参数设置为32,如图4所示。
(3) Gain1模块:采用Simulink默认的参数设置。
(4) Integrator模块:采用Simulink默认的参数设置。

图3 Ramp模块参数设置

图4 Gain模块参数设置
4 仿真分析
启动仿真,得到仿真结果如图5、6所示。

图5斜坡输入信号动态仿真曲线图

图6 称重系统动态仿真曲线图
把图5斜坡输入信号动态仿真曲线图与图6称重系统动态仿真曲线图进行比较可以发现加料初始阶段料斗震动较大,误差也较大,随着震动趋于稳定,误差越来越小,从料斗震动较大到料斗趋于稳定的时间大约是1.5s。这个结果可用来指导编程设计。在对控制系统进行程序编程时把数据采集时间设定在物料输出大于1.5s之后。这样采集到的数据比较准确,这在现场已经得到实验验证。通过仿真分析把进行数据采集的时间从原来的30s缩短到1.5s,这在很大程度上缩短了检测和数据采集的时间,降低了工人的工作量。
5 结论
本文主要介绍了称重系统的组成,建立了称重系统的数学模型,利用MATLAB里面的Simulink建立了称重系统的仿真模型,设置了仿真参数,进行了仿真,并对仿真结果进行了分析,得到了一些有益的结果,大大缩短了采样时间,提高了工作效率。
参考文献:
[1] 张海清,李宝安,定量下料问题的动态称重解决方案,计量学报,1998;19(3):221-224.
[2] 姚俊,马松辉.基于MATLAB 6.X Simulink 建模与仿真.西安电子科技大学出版社.2002.
[3] 徐科军.称重传感器自适应动态补偿方法.仪表技术与传感器.1997:6-8.
[4] 李宝安,李行善等.动态称重系统计量误差的动态校正.仪器仪表学报.
[5] 耿道霞,刘家彬.基于MATLAB的Simulink仿真环境在控制系统设计中的应用[J].电脑知识与技术,2007(14):519-520.
[6] 孙祥等.MATLAB 7.0基础教程[M].北京:清华大学出版社,2005.
[7] 吴四清.基于MATLAB的二阶系统仿真与分析[J].咸宁学院学报,2009,29(3):79-80.
[8] 毛健东.粉末状物料动态称重技术的研究.学位论文.西安理工大学,2004.4.
[9] 刘海.基于以太网的动态称重系统的软件研究与实现[D].南京:南京理工大学,2008.
作者简介:葛义朋(1990-06),男,汉族,籍贯:河南省驻马店市,当前职称:助理工程师,学历:研究生,研究方向:烟草机械。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



