天津水运工程勘察设计院 天津 300456
摘 要:在日常水运工程测量过程中,多波束测量逐渐普及,多波束测深的数据处理尤其重要。而在多波束测量三维定位数据处理中仪器安装姿态校准非常重要,Roll、Pitch、Yaw数值的校准偏差会直接影响到测量数据的归位精度。随着多波束测深仪器的逐渐更新,测量深距比值在逐渐增大,测量效率也越来越高,对船型姿态的要求也需更加精密。结合多波束测量的数据在内业中的归算原理,对船舶仪器安装姿态的校准误差与测深数据归位影响进行具体分析,用表格形式展现仪器安装姿态校准偏差带来的三维误差,以方便在多波束测量数据处理中,对以上三者的精度进行相应的把控。
关键词:多波束测深系统;姿态校准;三维定位
多波束测深系统在水运工程测量中应用越来越广泛,而国内外的研究更多的体现在提高其计算效率、优化多波束测深的测量精度,而关于在实际测量中应该把多波束姿态校准误差控制在多少范围内没有具体的分析,本文根据多波束测量的数据的归算原理,分析仪器安装姿态校准误差带来的影响,以方便在数据处理中对其进行把控。
1 多波束测深原理
多波束测深系统,是能够一次获取与测量船航向垂直方向上的几百个海底点的水深和水平位置的数据,它能够快速精确的测出沿着航向一定宽度、角度内的水下目标的大小、形态和高度的变化,从而可靠地绘制出海底地貌的详细特征。多波束测深系统具有测量范围大、测量效率高、测量精度高的优点。
多波束测量的数据归算原理如下。多波束系统采用发射接收指向性正交的两组换能器阵获取一系列垂直航向分布的窄波束。系统声信号的发射和接受由方向垂直的发射阵和接收阵组成。发射阵平行于测量船龙骨方向排列,并呈两侧对称向正下方发射船纵向角度比较小、船横向角度比较大的扇形脉冲声波,现在常用多波束测深系统船横向角度可以达到160°甚至更大,纵向开角一般控制在2°以内。接收阵沿船正横方向排列,在波束控制方向上接收方式与发射方式相反,以纵向比较大的角度、横向比较小角度接收来自海底照射扇区的回波。本文中我们假设多波束的分辨率足够大,即波束开角接近为线性的理性状态。
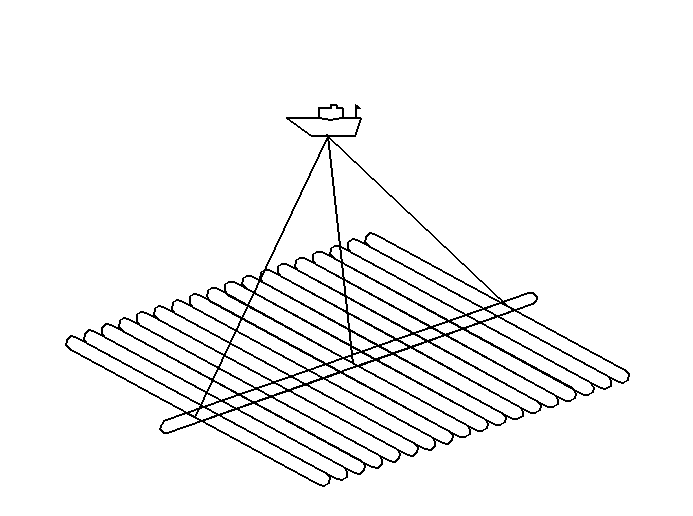
图1 多波束工作原理示意图
2 测深数据三维坐标归算
多波束测深仪海底面积采样率高,测深仪的波束角比较窄,但是波束角随着水深的增大,会降低测深精度,减小波束角则很容易丢失海底回波。因此我们假设多波束的分辨率足够高,回波信号足够好,下面将进行测深点的坐标归算进行分析:
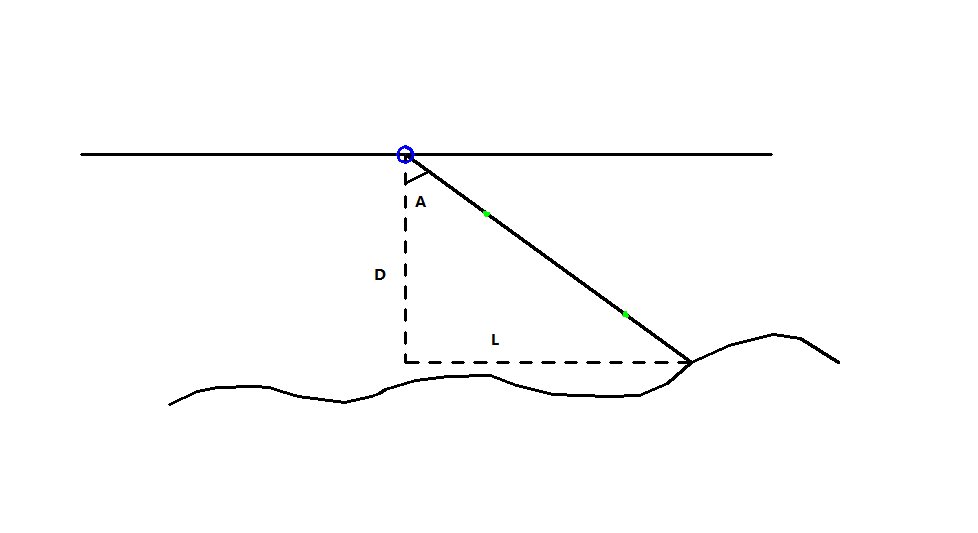
图2 多波束坐标归算示意图
多波束测量中各波束测深点的空间位置,在一定的声速曲线条件下计算公式为:
D=1/2StcosA
L=1/2StsinA
式中S为声速剖面,A为波束的入射角,t为波束从发射到接收声波信号之间的时间间隔,D表示波束探测到的水深值,L表示波束距离换能器中心的水平距离。
假设测量船在测量过程中,船舶因为前进动力导致测深仪换能器与水平方向夹角为C,则:D=1/2StcosAcosC,同时产生了平行于船艏方向的位置偏差Lc=1/2StsinAsinC。
Xc=1/2StsinAcosBsinC
Yc=1/2StsinAsinBsinC
假设O点的坐标为(X0,Y0,Z0),船艏向为B,则测到的地形点的坐标为:
X=X0+1/2StsinAsinB+1/2StsinAcosBsinC
Y=Y0+1/2StsinAcosB+1/2StsinAsinBsinC
Z=Z0+1/2StcosACosC
在实际测量中,波束的入射角A、船艏向B、测深仪换能器与水平方向夹角C分别对应了姿态中的Roll、Pitch、Yaw。三个数值的校准偏差直接影响到测量数据的归位精度。在声速剖面准确、定位点精确、时延为0的理想条件下,多波束测量水深点的平面位置归算受Roll、Pitch、Yaw影响,水深值受Roll、Yaw两个条件影响,并且平面位置、水深值存在的偏差都与声速剖面大小、波束发射到接收的时间成正比。
声速剖面大小、波束发射到接收的时间、归算中心点坐标都不在本文的研究范围以内,现在假设这三点在理想状态下,进行下文姿态校准偏差影响具体分析。
假设Roll、Pitch、Yaw的校准偏差分别为∆A、∆B、∆C,坐标偏差分别为∆X、∆Y、∆Z。
∆X=(1/2Stsin(A+∆A)sin(B+∆B)+1/2Stsin(A+∆A)cos(B+∆B)sin(C+∆C))-(1/2StsinAsinB+1/2StsinAcosBsinC)
∆Y=(1/2Stsin(A+∆A)cos(B+∆B)+1/2Stsin(A+∆A)sin(B+∆B)sin(C+∆C))-(1/2StsinAcosB+1/2StsinAsinBsinC)
∆Z=(1/2Stcos(A+∆A)Cos(C+∆C))-(1/2StcosACosC)
现在我们假设波束入射角为70°(接近多波束的边缘波束),船艏方向为45°,测深仪换能器与水平方向夹角为5°(接近常规船舶7节船速姿态),1/2St=50米(非特征地形区域水深约为17.1米),对多波束安装姿态伴随Roll、Pitch、Yaw值误差的影响列表分析。
①假设Roll值误差∆A为变量,其他元素为定值。
表1 以∆A为变量的数据分析
编码 | ∆A(°) | X(m) | Y(m) | Z(m) | 平面偏差(m) | 高程偏差(m) |
1 | 3.00 | 0.64 | 0.64 | -2.47 | 0.91 | 2.47 |
2 | 2.80 | 0.60 | 0.60 | -2.31 | 0.85 | 2.31 |
3 | 2.60 | 0.56 | 0.56 | -2.14 | 0.79 | 2.14 |
4 | 2.40 | 0.52 | 0.52 | -1.97 | 0.74 | 1.97 |
5 | 2.20 | 0.48 | 0.48 | -1.81 | 0.68 | 1.81 |
6 | 2.00 | 0.44 | 0.44 | -1.64 | 0.62 | 1.64 |
7 | 1.80 | 0.40 | 0.40 | -1.48 | 0.57 | 1.48 |
8 | 1.60 | 0.35 | 0.35 | -1.31 | 0.49 | 1.31 |
9 | 1.40 | 0.31 | 0.31 | -1.15 | 0.44 | 1.15 |
10 | 1.20 | 0.27 | 0.27 | -0.98 | 0.38 | 0.98 |
11 | 1.00 | 0.22 | 0.22 | -0.82 | 0.31 | 0.82 |
12 | 0.80 | 0.18 | 0.18 | -0.66 | 0.25 | 0.66 |
13 | 0.60 | 0.14 | 0.14 | -0.49 | 0.20 | 0.49 |
14 | 0.40 | 0.09 | 0.09 | -0.33 | 0.13 | 0.33 |
15 | 0.20 | 0.05 | 0.05 | -0.16 | 0.07 | 0.16 |
16 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
17 | -0.20 | -0.05 | -0.05 | 0.16 | 0.07 | 0.16 |
18 | -0.40 | -0.09 | -0.09 | 0.33 | 0.13 | 0.33 |
19 | -0.60 | -0.14 | -0.14 | 0.49 | 0.20 | 0.49 |
20 | -0.80 | -0.19 | -0.19 | 0.65 | 0.27 | 0.65 |
21 | -1.00 | -0.23 | -0.23 | 0.81 | 0.33 | 0.81 |
22 | -1.20 | -0.28 | -0.28 | 0.98 | 0.40 | 0.98 |
23 | -1.40 | -0.33 | -0.33 | 1.14 | 0.47 | 1.14 |
24 | -1.60 | -0.38 | -0.38 | 1.30 | 0.54 | 1.30 |
25 | -1.80 | -0.43 | -0.43 | 1.46 | 0.61 | 1.46 |
26 | -2.00 | -0.48 | -0.48 | 1.62 | 0.68 | 1.62 |
27 | -2.20 | -0.53 | -0.53 | 1.78 | 0.75 | 1.78 |
28 | -2.40 | -0.58 | -0.58 | 1.95 | 0.82 | 1.95 |
29 | -2.60 | -0.63 | -0.63 | 2.11 | 0.89 | 2.11 |
30 | -2.80 | -0.69 | -0.69 | 2.27 | 0.98 | 2.27 |
31 | -3.00 | -0.74 | -0.74 | 2.43 | 1.05 | 2.43 |
通过上表可以看出,Roll值校准偏差对多波束的边缘波束水深值影响非常大,在∆A为0.2°时高程偏差已经达到0.16米;对平面位置归算的影响也非常明显,在∆A为3°时的平面误差超过1米。
②假设Pitch值误差∆B为变量,其他元素为定值。
表2 以∆B为变量的数据分析
编码 | ∆B(°) | X(m) | Y(m) | Z(m) | 平面偏差(m) | 高程偏差(m) |
1 | 3.00 | 1.54 | -1.64 | 0.00 | 2.25 | 0.00 |
2 | 2.80 | 1.44 | -1.52 | 0.00 | 2.09 | 0.00 |
3 | 2.60 | 1.34 | -1.41 | 0.00 | 1.95 | 0.00 |
4 | 2.40 | 1.24 | -1.30 | 0.00 | 1.80 | 0.00 |
5 | 2.20 | 1.14 | -1.19 | 0.00 | 1.65 | 0.00 |
6 | 2.00 | 1.04 | -1.08 | 0.00 | 1.50 | 0.00 |
7 | 1.80 | 0.93 | -0.97 | 0.00 | 1.34 | 0.00 |
8 | 1.60 | 0.83 | -0.86 | 0.00 | 1.20 | 0.00 |
9 | 1.40 | 0.73 | -0.75 | 0.00 | 1.05 | 0.00 |
10 | 1.20 | 0.63 | -0.64 | 0.00 | 0.90 | 0.00 |
11 | 1.00 | 0.52 | -0.53 | 0.00 | 0.74 | 0.00 |
12 | 0.80 | 0.42 | -0.43 | 0.00 | 0.60 | 0.00 |
13 | 0.60 | 0.32 | -0.32 | 0.00 | 0.45 | 0.00 |
14 | 0.40 | 0.21 | -0.21 | 0.00 | 0.30 | 0.00 |
15 | 0.20 | 0.11 | -0.11 | 0.00 | 0.16 | 0.00 |
16 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
17 | -0.20 | -0.11 | 0.11 | 0.00 | 0.16 | 0.00 |
18 | -0.40 | -0.21 | 0.21 | 0.00 | 0.30 | 0.00 |
19 | -0.60 | -0.32 | 0.32 | 0.00 | 0.45 | 0.00 |
20 | -0.80 | -0.43 | 0.42 | 0.00 | 0.60 | 0.00 |
21 | -1.00 | -0.53 | 0.52 | 0.00 | 0.74 | 0.00 |
22 | -1.20 | -0.64 | 0.63 | 0.00 | 0.90 | 0.00 |
23 | -1.40 | -0.75 | 0.73 | 0.00 | 1.05 | 0.00 |
24 | -1.60 | -0.86 | 0.83 | 0.00 | 1.20 | 0.00 |
25 | -1.80 | -0.97 | 0.93 | 0.00 | 1.34 | 0.00 |
26 | -2.00 | -1.08 | 1.04 | 0.00 | 1.50 | 0.00 |
27 | -2.20 | -1.19 | 1.14 | 0.00 | 1.65 | 0.00 |
28 | -2.40 | -1.30 | 1.24 | 0.00 | 1.80 | 0.00 |
29 | -2.60 | -1.41 | 1.34 | 0.00 | 1.95 | 0.00 |
30 | -2.80 | -1.52 | 1.44 | 0.00 | 2.09 | 0.00 |
31 | -3.00 | -1.64 | 1.54 | 0.00 | 2.25 | 0.00 |
通过上表可以看出,Pitch值校准偏差对多波束的边缘波束垂直水深定位无影响,但是对平面位置归算的影响非常明显,在∆B为1.4°时的平面误差已经超过1米。
③假设Yaw值误差∆C为变量,其他元素为定值。
表3 以∆C为变量的数据分析
编码 | ∆C(°) | X(m) | Y(m) | Z(m) | 平面偏差(m) | 高程偏差(m) |
1 | 3.00 | 1.73 | 1.73 | -0.10 | 2.45 | 0.10 |
2 | 2.80 | 1.61 | 1.61 | -0.09 | 2.28 | 0.09 |
3 | 2.60 | 1.50 | 1.50 | -0.09 | 2.12 | 0.09 |
4 | 2.40 | 1.38 | 1.38 | -0.08 | 1.95 | 0.08 |
5 | 2.20 | 1.27 | 1.27 | -0.07 | 1.80 | 0.07 |
6 | 2.00 | 1.15 | 1.15 | -0.06 | 1.63 | 0.06 |
7 | 1.80 | 1.04 | 1.04 | -0.06 | 1.47 | 0.06 |
8 | 1.60 | 0.92 | 0.92 | -0.05 | 1.30 | 0.05 |
9 | 1.40 | 0.81 | 0.81 | -0.04 | 1.15 | 0.04 |
10 | 1.20 | 0.69 | 0.69 | -0.03 | 0.98 | 0.03 |
11 | 1.00 | 0.58 | 0.58 | -0.03 | 0.82 | 0.03 |
12 | 0.80 | 0.46 | 0.46 | -0.02 | 0.65 | 0.02 |
13 | 0.60 | 0.35 | 0.35 | -0.02 | 0.49 | 0.02 |
14 | 0.40 | 0.23 | 0.23 | -0.01 | 0.33 | 0.01 |
15 | 0.20 | 0.12 | 0.12 | -0.01 | 0.17 | 0.01 |
16 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
17 | -0.20 | -0.12 | -0.12 | 0.01 | 0.17 | 0.01 |
18 | -0.40 | -0.23 | -0.23 | 0.01 | 0.33 | 0.01 |
19 | -0.60 | -0.35 | -0.35 | 0.01 | 0.49 | 0.01 |
20 | -0.80 | -0.46 | -0.46 | 0.02 | 0.65 | 0.02 |
21 | -1.00 | -0.58 | -0.58 | 0.02 | 0.82 | 0.02 |
22 | -1.20 | -0.69 | -0.69 | 0.03 | 0.98 | 0.03 |
23 | -1.40 | -0.81 | -0.81 | 0.03 | 1.15 | 0.03 |
24 | -1.60 | -0.93 | -0.93 | 0.03 | 1.32 | 0.03 |
25 | -1.80 | -1.04 | -1.04 | 0.04 | 1.47 | 0.04 |
26 | -2.00 | -1.16 | -1.16 | 0.04 | 1.64 | 0.04 |
27 | -2.20 | -1.27 | -1.27 | 0.04 | 1.80 | 0.04 |
28 | -2.40 | -1.39 | -1.39 | 0.05 | 1.97 | 0.05 |
29 | -2.60 | -1.50 | -1.50 | 0.05 | 2.12 | 0.05 |
30 | -2.80 | -1.62 | -1.62 | 0.05 | 2.29 | 0.05 |
31 | -3.00 | -1.74 | -1.74 | 0.05 | 2.46 | 0.05 |
通过上表可以看出,Yaw值校准偏差对多波束的边缘波束水深值影响相对较小,但是对平面位置归算的影响非常大,在∆C为1.4°时的平面误差已经超过1米。
3 结论
通过上述各表可以得出结论,对于多波束测量三维定位,仪器安装姿态校准非常重要,Roll、Pitch、Yaw数值的校准偏差直接影响到测量数据的归位精度,Roll、Pitch、Yaw数值的校准偏差对测深数据的平面位置归算有非常大的影响,Roll值对测深数据的水深值归算具有非常大的影响。在多波束测量中需要根据测量要求对三者进行到精确的计算,将误差降到最小,以保证测量数据的归算精度。
参考文献:
[1]郭发宾,张卫红.姿态传感器在水深测量中的应用[J].海洋测绘, 2004,24(3):56-58.
[2]刘雁春.海洋测深空间结构及其数据处理[M].北京:测绘出版社
[3]陈非凡.多波束条带测深仪研究发展动态[J].海洋技术, 1998,17(2):1-5.
作者简介:孟凡修,生于1990年,男,汉族,山东临沂人,大学本科,毕业于山东科技大学,工程师,研究方向:测绘科学与技术

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



