烟台打捞局 山东 烟台 264012
【摘要】在极浅水域采用S-lay铺管方式铺设大管径、高刚度的管道时,正确选择张紧器控制方式至关重要。保持管线和管线上张力稳定是铺管作业安全顺利的前提。本文对一次在极浅水域进行大管径海管铺设时出现的管线异常抖动的原因进行了排查分析,对张紧器恒张力控制模式和自动扭矩控制模式在极浅水域铺设大管径海管的适用性进行了研究。
【关键词】抖动、自动恒张力模式、自动扭矩模式
1背景介绍
烟台打捞局“德合”轮是一艘同时具备5000吨起重能力和3000米水深S-lay铺管能力的起重铺管船。该船配备了DP3动力定位系统和十点锚泊定位系统,可在各种海域精准定位,进行起重和铺管作业。
2020年1月,“德合”轮在水深12米的极浅海域采用锚泊定位的方式铺设32英寸的海管(海管管线刚度为620吨/米)时,海管出现了连续抖动的异常情况。根据现场CCTV视频记录显示,管线在张紧器夹持下前后抖动,幅度为10-20cm,周期约为2.2秒,共抖动9-10个周期,总持续时间为25-30秒。在开始抖动后的13秒,张紧器操作员将张紧器的增益值由0.25降低到0.05,管线抖动随即改善并停止,张紧器张力稳定在167吨。抖动发生时张紧器工作在自动恒张力模式下,张力设定值167吨。张紧器增益为0.25,Dead Band功能未激活。
2 管线抖动时管线张力数据重构
管线异常抖动事件发生后,铺管作业被暂停。为保证铺管作业的安全,管线异常抖动的原因需要查明。首先分析了张紧器HMI屏幕上的张紧器张力和速度的曲线。如图1所示:

图1:管线抖动期间IHC张紧器张力和速度曲线
由图1曲线可以看出,张紧器HMI上显示的张力和速度数据曲线与CCTV记录的管线抖动情况不符。经查询HMI屏幕刷新频率参数得知,HMI屏幕的刷新周期为2秒,由于刷新频率过低,HMI 上的曲线不能准确显示管线抖动过程的张力和速度数据。
为了重构管线抖动时管线张力信息,调取了该时段张紧器独立数据记录仪内张紧器张力数据并做图2分析。
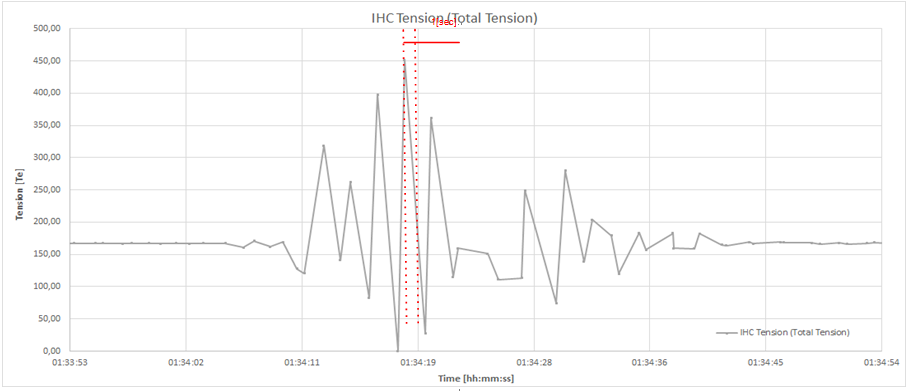
图 2 张紧器独立数据记录仪记录的张力数据
由图2曲线可以看出,在采样频率更快的样本数据下,张紧器的张力波动曲线与事发时CCTV记录的管线抖动情况基本一致。为了进一步确认上述数据的,检查并叠加来自船舶自动化系统数据记录仪记录的张力数据。做图3曲线。
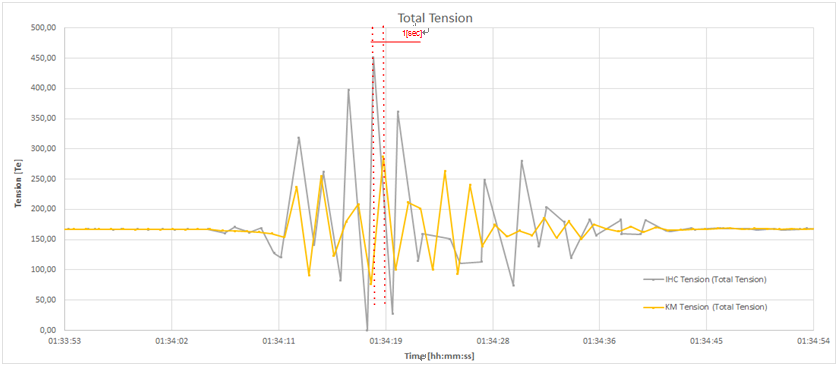
图3 IHC张紧器数据记录仪和KM数据记录仪上的张力数据重构曲线
如图3所示,经拟和的IHC张紧器数据记录仪数据和KM数据记录仪数据进一步增加了张力数值样本的数量,数据曲线显示张力震荡周期为2.2秒,与现场CCTV视频一致。
从管线开始抖动的第13秒起,张紧器的增益值从0.25调整为0.05,管线上的张力逐渐恢复稳定,并在短时间内恢复到设定的恒张力值167吨。如图4所示:

图4张紧器增益值调整后张力变化曲线
3船舶和张紧器运动情况重构
为了进一步分析引起管线抖动的原因,选取船舶自动化系统kM数据记录仪在事件发生前、期间和之后记录的船舶纵荡、摇摆,张紧器运动和张力等参数,拟合成图5曲线。
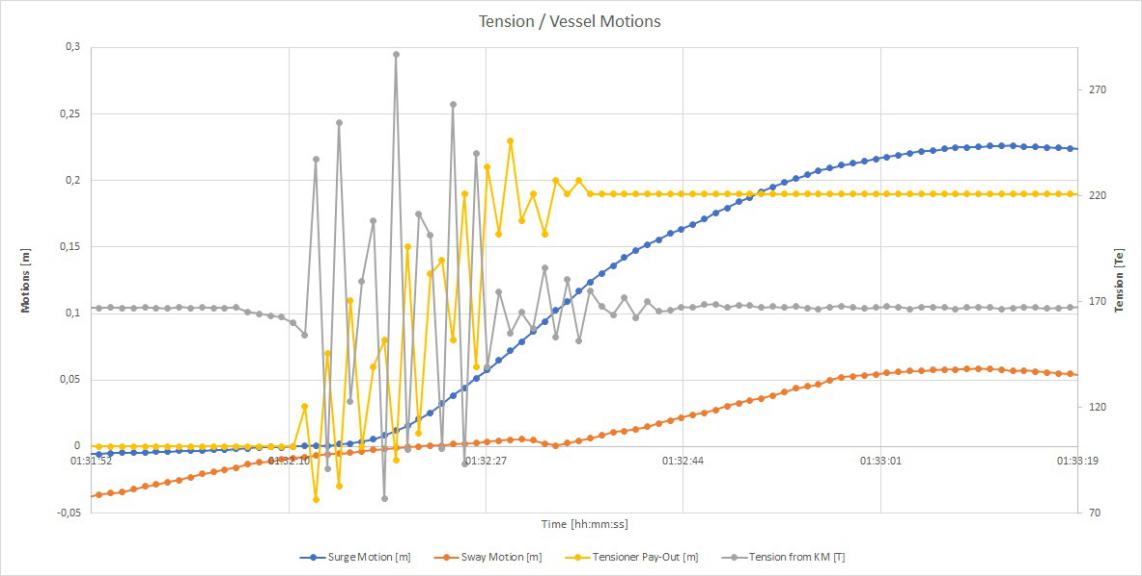
图5 管线异常抖动前、中、后船舶和张紧器运动情况曲线
如图5和可以看出,在管线异常抖动发生之前,船舶的纵荡和摇摆运动都是相当稳定的,当管线异常抖动事件被触发时,在外部扰动的作用下,船舶向前移动了大约23厘米。张紧器在事件发生前后移动的距离是18-19cm。
4张紧器的自动恒张力模式和自动恒扭矩模式
4.1 张紧器自动恒张力模式
当张紧器工作在自动恒张力模式时,对于管线上张力的变化张紧器会通过收管和放管的方式来补偿。自动恒张力模式下,张紧器对管线张力变化的反馈公式是增益的函数。较高的增益值可以让张紧器对管线上张力的反应非常灵敏,可以很好的补偿管线上张力变化,但有会导致管线抖动。较低的增益值可以让张紧器最大程度保持管线的稳定,但对管线上的张力变化没有足够的补偿,会导致管线张力变化。本次管线异常振动事件发生时张紧器的增益值为0.25,系统对任何张力变化都非常敏感。考虑到大直径管道的刚度,一个小的船舶运动都能够引起自动恒张力模式下的张紧系统的迅速补偿响应,导致管线高频率的抖动。当增益被调整到0.05后,系统对张力变化的补偿灵敏度降低,管子抖动得到抑制,但是此时张紧器系统保持管线恒张力的能力降低。由于增益值只能设定一个,在极浅水域进行大管径刚性管道铺设时,选择合适的即能保证管线稳定又能保证管线张力稳定的增益值是相当困难的。
4.2 张紧器自动恒扭矩模式
自动扭矩控制模式是一种开环控制。在自动扭矩模式下,张紧器将不再关注管线上张力的设定值和反馈值。在自动扭矩模式下,管线的张力值需要由张紧器操作员通过增加和减小扭矩设定值来控制,不像自动恒张力模式下,管线上的张力由张紧器的闭环张力控制系统来补偿和保持。因此,在自动扭矩模式下,张紧器操作员对张紧器的干预就会明显增多。当船舶向管道敷设方向移动时会导致管线张力增大,张紧器操作员需要减小扭矩来补偿管线张力的增大。当船舶向收管方向移动时会导致管线张力不足,张紧器操作员需要增大扭矩来补偿管线张力的减小。由于马达的惯性没法补偿,所以铺设管道时的船舶移动需尽可能的平稳。为防止管线上张力过小,自动扭矩模式下的扭矩值要设定的足够高。
5铺管线异常抖动原因分析及解决措施
对管线张力和船舶运动以及张紧器运动的分析的数据没有显示出任何明确的引起震荡的触发事件。但是,考虑到管道刚度非常高(620吨/米)和作业区域水深以及浪涌方向,可以得出结论,任何引起船舶前后运动的外部扰动都可以导致管线上张力的变化进而引起张紧器的张力补偿反应。在这种刚性系统中,船舶前后运动5cm到10cm就可以有30吨到60吨的张紧力变化。
基于上述分析,这些扰动可能由以下任何一个因素所导致:
1)其中一口定位锚的抓地力突然出现小的降低而导致的船舶小的位移;
2)作业现场风向的突然变化而导致的船舶小位移;
3)管线在张紧器上的轻微滑动。
考虑到极浅水域以及大管径高刚性管道的特点,自动恒张力模式并不是最优的张紧器工作模式,因为张紧器操作员难以选择一个即能保证管线稳定又保证管线张力恒定的增益值。在这种情况下,选择自动扭矩模式是更为安全和正确的操作方式。
参考文献
[1] 铺管船铺管作业锚泊系统分析 曾骥 2013
[2]深海铺管船恒张力张紧器研究 吴建 2016

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



