合肥工业大学 合肥 230009
摘 要
随着汽车“智能化、网联化、电动化、共享化”普及,以及自动驾驶技术的发展,线控制动系统是实现汽车自动驾驶的关键技术。本文以某轻型商用车液压刹车系统为比较研究对象,在认真分析研究原车制动系统的基础上,设计了一套以电机作为动力源的线控系统架构,满足智能底盘对制动系统的功能需求、结构需求和控制需求。通过对永磁同步电机的运行特性和控制方案的研究,提出了一种有效的电控策略,并通过仿真实验验证了系统结构与控制策略的有效性。
关键词:线控制动系统;仿真;电机控制
1.引言
在汽车智能化、网络化和信息化日益发展的趋势下,汽车电控策略研究越发丰富,可实现包括线控制动系统在内的多系统协同控制[1]。线控制动技术具有执行快、控制精度高的特点,配合整车及电机控制可实现制动能量回收[2]。线控制动是未来汽车制动技术的发展方向,可以深度融合汽车自动驾驶功能模块,是智能汽车、智能交通和智慧城市的时代需要[3]。因此,研究线控制动系统具有重要意义。
2.线控制动系统结构设计
以某轻型商用车液压刹车系统为比较研究对象,在认真分析研究原车制动系统的基础上,设计了一套以电机作为动力源的线控系统架构,满足智能底盘对制动系统的功能需求、结构需求和控制需求。通过对目标车型制动需求的研究分析,确定永磁同步电机作为系统的动力源,依据选定的动力电机开发设计了一套与目标车辆制动系统参数匹配的力矩传动及运动转化机构,并建立相应的数学模型验证了设计机构在扭矩生成、功率传动、运动转化等方面的可行性,并对设计的线控制动系统关键部件进行了理论设计与计算,包括系统机械架构设计、动力电机的选型设计、传动机构的选型设计、滚珠丝杠机构的选型设计。
2.1主缸活塞推力计算
由表1和表2的整车参数及制动器参数计算得到目标车型的制动主缸的最大活塞推力为![]() 。
。
参数 | 数值 |
质心距前轴a(mm) | 2171.0 |
质心高hg(mm) | 950.0 |
总质量m (kg) | 4500.0 |
车轮半径(mm) | 374 |
主缸直径(mm) | 32 |
主缸行程(mm) | 33 |
前轴负荷G1 (kg) | 2050.0 |
前轴质量分配 % | 0.46 |
后轴负荷G2 (kg) | 2450.0 |
后轴质量分配 % | 0.54 |
表1 整车参数
前制动器总成 | 后制动器总成 | |
制动器结构型式 | 液压盘式制动器 | 液压鼓式制动器(双向双领蹄) |
制动器规格 (直径×蹄宽mm) | | |
制动器的制动力矩 (Nm) | 4377(0.8道路附着系数) | 2043(0.8道路附着系数) |
表2 制动器参数
2.2滚珠丝杠设计
由如下公式可得到丝杠直线运动速度。
![]() (1)
(1)
式中:![]() —丝杠直线运动速度;
—丝杠直线运动速度;
t—制动建压时间;
![]() —制动主缸行程。
—制动主缸行程。
当汽车紧急制动时,国标规定制动系统建压时间应小于0.6S,取系统制动建压时间为0.4S符合设计要求。由提供的制动主缸行程参数可计算出滚珠丝杠直线移动速度![]() ,选择导程为10mm滚珠丝杠,则螺母的转速为:
,选择导程为10mm滚珠丝杠,则螺母的转速为:
![]() (2)
(2)
根据机械设计手册中滚珠丝杠设计的部分可得滚珠丝杠的具体参数如表3所示[4]。
参数 | 大小 | 单位 |
公称直径 | 40 | mm |
导程 | 10 | mm |
额定动载荷 | 17 | kN |
全长 | 106 | mm |
表3 滚珠丝杠参数
2.3同步带设计
由前文提供的参数参考机械设计手册可选定同步带的参数如表4所示。
参数 | 大小 | 单位 |
公称直径 | 40 | mm |
导程 | 10 | mm |
额定动载荷 | 17 | kN |
全长 | 106 | mm |
表4 同步带参数
2.4电机选型
由扭矩的平衡原理,可得到电机扭矩与作用于主缸活塞的最大推力之间的关系如下:
![]() (3)
(3)
式中:![]() —电机输出扭矩;
—电机输出扭矩;
![]() —作用于主缸活塞上的最大推力;
—作用于主缸活塞上的最大推力;
![]() —滚珠丝杠导程;
—滚珠丝杠导程;
![]() —滚珠丝杠的机械效率;
—滚珠丝杠的机械效率;
![]() —减速比。
—减速比。
电机的转速可以由丝杠的直线运动速度反推得到,如下式所示:
![]() (4)
(4)
式中:nm—电机转速;
vs—丝杠直线运动速度。
滚珠丝杠的机械效率选定0.9,计算可得:Tm=2.72N·m,nm=1485r/min。根据上述计算最终确定电机参数如下表所示:
电机参数表 | |
电机型号 | ACSM80-G02430LZ |
额定电压(三相) | 220V |
额定功率(KW) | 0.75 |
额定转矩(N.m) | 2.4 |
最大转矩(N.m) | 7.2 |
额定转速(r/min) | 3000 |
转子惯量(kg.m2) | 1.2*10-4 |
额定电流(A) | 4.2 |
相反电势(V/Krpm) | 22.77 |
相电阻(Ω) | 0.901 |
相电感(mH) | 6.552 |
表4 电机参数表
3.电控策略
在对永磁同步电机模型详细研究分析的基础上,通过对永磁同步电机的运行特性和控制方案的研究,提出采用滑模算法估算转子位置的无位置传感器电机控制方案[5]。过对永磁同步电机矢量控制的研究分析,提出了采用经过PI调节的制动压力反馈值作为输入信号控制电机输出扭矩的控制策略,实现对电机输出扭矩的控制,控制系统的电控策略模型架构如图1所示。
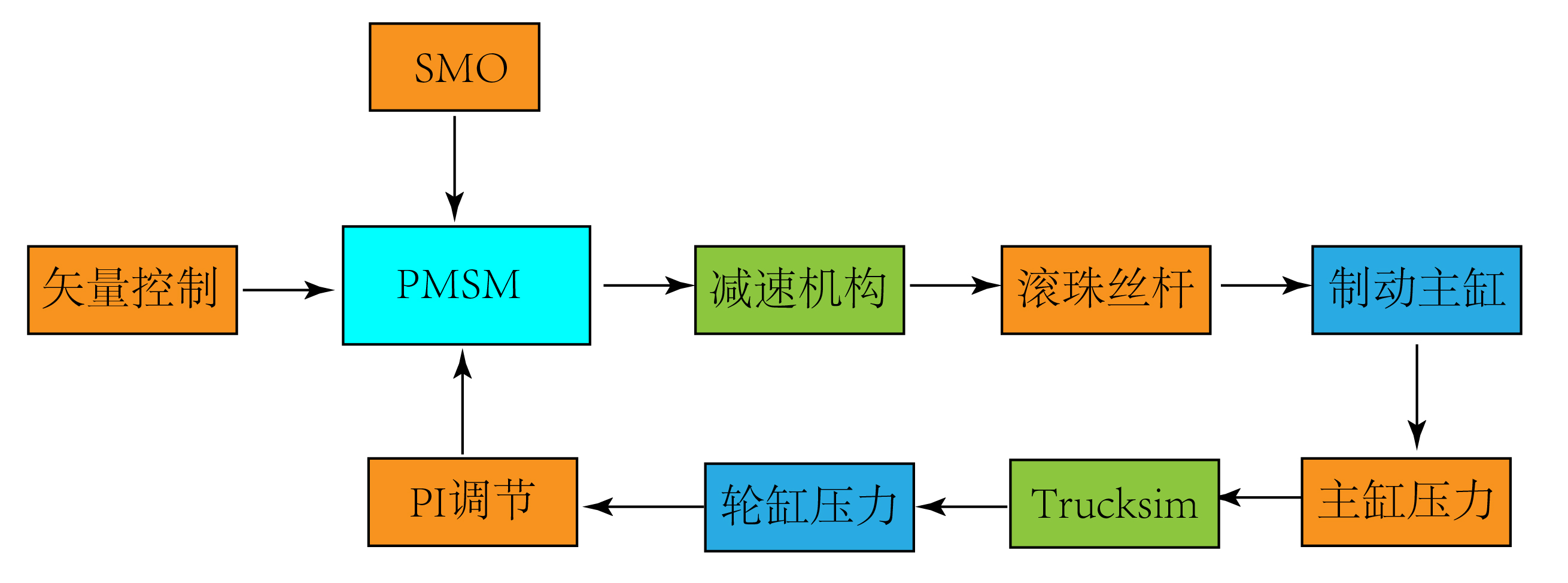
图1 电控策略模型架构
仿真结果分析
4.1高附着系数路面仿真分析
在整车仿真模型中车速设置为65km/h,路面附着系数为0.8,电机输出扭矩为2.4N/m的条件下进行仿真分析。在此种工况下得到电机扭矩、车辆纵向速度的结果如图2、图3所示。可以看出电机扭矩在0.05S时响应,并经过一次高峰之后在0.072S时第一次达到给定值,并以保持在给定值上下波动近似恒扭矩输出,完全与预期的效果一致。
 图2 电机扭矩
图2 电机扭矩
图3 车辆纵向速度
4.2低附着系数路面仿真分析
在整车仿真模型中车速设置为25km/h,路面附着系数为0.2,电机的扭矩输出值参考值为7.2N.m,在此条件下进行仿真分析。得到电机扭矩、车辆纵向速度的结果如图4、图5所示。有图可以看出在低附着系数的路面上电机输出扭矩在经过一小段时间的明显波动才在给定值上下浮动的稳定状态。汽车速度在4.7S内从25km/h达到0。
图4 电机扭矩
 图5 车辆纵向速度
图5 车辆纵向速度
由上述仿真结果可以看出,所设计的制动系统结构及部件的设计参数在合理范围内,同时还验证了控制策略的有效性。
参考文献
徐永刚. 电子信息与智能化技术在汽车上的应用探析[J]. 电子世界, 2018, No.543(09):46-47.
谭智慧. 电控液压制动系统及其制动能量回收控制策略的研究[D].
李付俊. 浅谈汽车自动驾驶技术的发展与未来[J]. 黑龙江科技信息, 2016(16):59-59.
机械制造 机 J. 《机械设计手册(第6版)》问世[J], 56(10): 23.
许健. 永磁同步电机无速度传感器状态估计与控制研究[D]. 2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



