武警工程大学乌鲁木齐校区 新疆乌鲁木齐市 830000
摘要:无人机检测是一种人工与智能检测相结合的新型检测模式。最早运用于英国威尔士大学和英国电力咨询公司,也正因为其成本低、操作方便、维护简单等特点,逐渐开始应用于测绘、电网规划、灾害应急响应、线路架设、安全监测等电力系统任务。
关键词:智能电网;无人机;输电线路巡视;图像识别;
分析无人机辅助巡视的系统结构、作业模式及搭载设备,针对拍摄的高清细节巡视图像,在采用阈值分割,形态学和边缘检测技术的基础上,设计绝缘子的连通域特征和形状特征,提出能适应航拍的复杂背景和多角度的绝缘子自爆缺陷识别算法,实现绝缘子缺陷的自动侦测,减少人工干预。测试表明,无人机辅助巡视系统有效弥补人工巡视的不足,图像识别技术为缺陷判别提供了智能化的决策依据,与传统基于颜色特征算法相比,在复杂背景下识别准确率达到85%,是高新技术在智能电网中应用的有益探索。
一、无人机辅助巡视系统结构
无人机辅助巡视分为“飞行”和“巡视作业”两个阶段,无人机从地面飞抵目标以及完成任务后返回地面的过程,称为“飞行阶段”;无人机飞抵目标并开展绝缘子、线路等的巡视工作,称为“巡视作业阶段”。从结构上看,该巡视系统由六旋翼无人机、无线通信链路、地面站和监控中心组成,如图1所示。
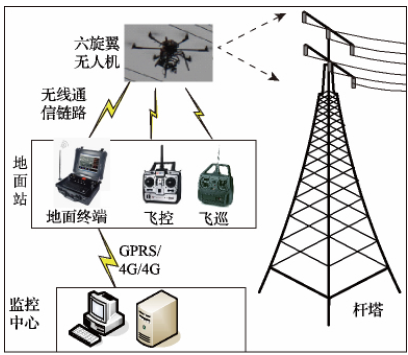
图1无人机辅助巡视系统结构
其中,无人机作为搭载平台,搭载供电设备、检测设备、控制设备等硬件设施到达空中完成指定作业。无线通信链路包括无线图传、无人机遥控、相机无线遥控等三种数据,分别实现实时视频传输、飞行操控、遥控拍摄照片。地面站由地面终端(可以为车载终端、便携式终端等)、遥控和飞巡装置等构成,完成无人机控制、目标的巡视、数据采集、实时视频展示等功能,并在野外现场进行数据预处理,判断巡视结果,同时将处理结果及原始图片等信息通过GPRS/3G/4G网络上传监控中心以作进一步的分析和存储。系统设置两个操控手,其一为飞控手,完成无人机的操控,无人机在飞行过程复杂,可能遇到多种复杂气象条件、障碍等,由专人操控可最大限度确保安全。其二为飞巡手,专门负责线路巡视任务,通过视频观测引流线、绝缘子、防震锤、线夹、导线、铁塔等巡视目标,利用遥控设备远程控制云台调整相机的方位来选择合适角度拍摄高清照片。无人机搭载的设备包括图传、三轴云台、IOSD、高清数码相机、飞巡控制模块接收器以及各类传感器,还可以根据巡视的要求更换或加载更多的巡视设备,如图2所示无人机搭载设备。
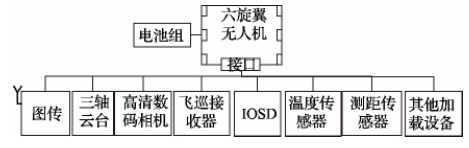
图2无人机搭载设备
其中,图传通过5.8 GHz无线载波技术,将无人机搭载的高清相机拍摄的实时画面传回地面站,方便地面站人员判断无人机方位和视角;云台可以进行水平、俯仰、滚转三个方向的180°转动,进行多视角调整;IOSD读取主控里面的各种传感器信息并和视频叠加,通过图传回传地面监视器,供操控手判断飞行器当前的方向和速度,实现辅助导航。飞巡控制模块接收器主要用于接收地面站控制人员发出的各项指令,传输至无人机主控做出相应的姿态调整;其他的各类传感器主要负责采集无人机周围的各种数据参数的检测,反馈给无人机主控,确保无人机在一个安全稳定的环境中作业。
二、绝缘子缺陷图像识别
图像识别技术使得计算机对所获取的图像自动进行分析和辨识感兴趣的特征,比如识别变电站的开关的分合状态、电力设备标志牌和输电线路缺陷等。传统的绝缘子缺陷的识别依赖于提取绝缘子完整的边缘,然后根据绝缘子的形状特征进行缺陷识别。在无人机航拍的图像中,由于航拍角度不固定和复杂的背景使得传统的算法不稳定。提出的绝缘子自爆缺陷的图像识别算法不依赖于绝缘子的形状特征,而是利用连通区域的特征,能适应航拍的多角度,首先在整个图片中搜索绝缘子区域,然后检测其边缘,最后根据拟合误差确定绝缘子是否存在自爆缺陷,具体流程如下:(1)背景滤除与绝缘子区域获取。由于绝缘子是陶瓷材质的,由于其具有很强的反光特性,再加上航拍背景的复杂性,使得绝缘子的分割成为了一个难题。但相邻陶瓷绝缘子连接部分一般具有较低的灰度值,而且受光照条件干扰较小,可作为阈值分割的参数。通过选取一定的阈值,经阈值分割后可以得到分割后的二值图像。经过阈值化处理后,可以得到绝缘子连接部分,但所得的二值图像仍然含有细小的背景干扰,而且与绝缘子连接部分的金具无法去除。利用形态学“开运算”的方法可以去除复杂的背景干扰,同时将绝缘子连接部分与金具分开。需要去除金具部分的干扰,本算法采用连通域面积的特点对所有的连通域进行过滤。将连通域面积小于指定值的区域去除。过滤算法流程具体描述如下:1)对所有的联通域面积进行统计。2)选取联通域中心坐标靠近图像中心的联通域面积作为阈值。3)去除连通域面积大于2倍面积阈值或者小于0.5倍阈值的连通域。经过上述过滤处理之后,得到的感兴趣的区域。此时,绝缘子的分割效果达到理想状态。即为下一步判断绝缘子自爆提供高质量的保证。获得纯净的绝缘子分割后的连接图像,可得到绝缘子的区域位置关系,为下一步的绝缘子的定位奠定了基础。由于绝缘子形状和空间排列有一定的规律性,根据绝缘子连接的图像可以精确确定绝缘子的位置。绝缘子位于两个连通域的间隙,获取前三个联通域的外接矩形,外接矩形的宽度为H,中心坐标分别为A、B,并且两个中心坐标的距离为Dis。由图中几何关系可以很容易获得绝缘子的中心坐标:
O(XA,YA+(YB-YA)×0.5)
并取绝缘子区域的宽度为3×H,高度为0.5×Dis。(2)区域内边缘检测。获取绝缘子的区域信息和位置关系之后,需要对绝缘子进行边缘检测,获取细化的边缘信息,以便对每一个绝缘子进行椭圆拟合。Canny边缘检测中,gx为x为方向的偏导数,gy为y方向的偏导数,M(x,y)梯度幅度图像,A(x,y)梯度方向图像。为了方便椭圆拟合,得到单一的边缘响应,需要细化边缘。采用非最大梯度幅值抑制来进行处理。设非最大梯度幅值抑制图像为C(x,y),沿方向图像A(x,y)所指的方向比较梯度幅值图像M(x,y)的值。若M(x,y)的值至少小于两个邻居之一,则将其抑制,把对应的C(x,y)设为零;若不然,则令C(x,y)等于M(x,y)。对绝缘子连接部分进行Canny检测,单个绝缘子经Canny边缘检测和非最大梯度幅值抑制处理之后得到的结果如图3所示,观察处理结果,可见其反应出绝缘子的形状特征。

图3 canny边缘检测
因此结合绝缘子的形状特征和区域关系,可实现对绝缘子自爆缺陷的判断。(3)绝缘子自爆缺陷识别。将图3所示经细化后的边缘点的位置数据存入数组中,结合绝缘子的形状特征对这些边缘点进行椭圆拟合。根据拟合误差来判断绝缘子是否存在自爆缺陷。如果绝缘子没有自爆则拟合的误差就会很小,如果有自爆则缺陷拟合误差会比较大。N为边缘点的个数,errorcount为存在误差的边缘点的个数,error为椭圆拟合的误差。经反复测试,当error<0.5时说明椭圆拟合度较差,即反应出绝缘子存在自爆缺陷。
总之,输电线路无人机辅助巡视充分利用了六旋翼无人机良好机动性和操控性,依靠搭载的高分辨率遥控相机从多角度近距离拍摄目标图像,获取不同类别的缺陷的关键细节。这些多角度的关键细节是人工巡视无法获取的。同时利用图像识别技术来实现对绝缘子自爆缺陷的自动分割和识别,提高了巡视的自动化程度和巡视效率,也在一定程度上避免了人工巡视和缺陷分析的不足,实现电力系统智能化。
参考文献:
[1]王浩宇,无人机在电力系统中的应用及发展方向.2018.
[2]刘翠,浅谈无人机辅助巡视及绝缘子缺陷图像识别研究.2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



