河北华清环境科技集团股份有限公司 河北石家庄 050000
摘要:根据实验室的标准处理流程,针对实验室样品大批量、实验人员不足、自动化程度较低等缺点而设计的一款高效、快捷的样品前处理设备-全自动石墨消解仪。而在设备自动消解流程中,能否准确的定容是样品处理的关键所在,因此,针对该类定容问题,本文研究了设备处理流程中的超声波定容方法,充分考虑不同的干扰以及杂波信号,利用滑动中值滤波方法与卡尔曼滤波方法相结合,对其干扰信号进行处理,以提高与实现高精度的体积定容,最后通过实验以及结果验证了该方法的可行性。
关键词: 超声波定容;滤波;算法
全自动石墨消解仪是主要用于样品处理中的重金属检测前处理[1],设备可用于环保、疾控、商检、质检、第三方检测、高校实验室、工厂、科研机构等分析领域[2];设备可以自动实现加液、震荡、加热、冷却、去酸、定容等取代人工操作的步骤,其中定容的准确程度是关系整个前处理成败的关键所在[3]。
消解仪上配备了基于高频段超声波距离传感器的精密定容装置,其中超声波传感器与消解管同轴安置,垂直放置并保持固定垂直距离,加液泵则通过导管从稍偏离轴的位置加入液体[4]。
由于受到超声波传感器噪声,液面强烈波动,液柱遮挡波束以及采用高速蠕动泵作为加液泵时不稳定的流量,导致超声波传感器无法传回稳定减少的距离数值即液面上升情况,因此很难通过简单的信号处理达到准确定容的目的,下图框图如图1为定容控制原理图。
图1 定容控制原理框图
为解决上述问题,本方法采用滑动中值滤波作为前置滤波器,去处传感器原始数据中大量的脉冲噪声,再输入经典卡尔曼滤波算法对超声波传感器传回的数据进行信号处理,得到估计出的实际液面上升情况,包括液面距离和其上升速度,从而实现高精度的液体定容。
中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的数值接近的真实值,从而消除孤立的噪声点[5]。中值滤波对脉冲噪声有良好的滤除作用,特别是在滤除噪声的同时,能够保护信号的边缘,使之不被模糊,因此选择此方法用于去除大尺幅的脉冲信号。
实验结果表明传感器原始数据中存在密集的脉冲噪声,这会严重干扰卡尔曼滤波器的性能。滑动中值滤波属于非线性滤波,能够大幅度去除测量信号中大幅度的脉冲噪声;但会引入测量值时间的延迟和波动,尤其是在滑动窗口较大情况下。根据传感器测量速度和加液速度的相对关系,窗口宽度可取3~10。
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法;由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程[6]。
数据滤波是去除噪声还原真实数据的一种数据处理技术,Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态;由于它便于计算机编程实现,并能够对现场采集的数据进行实时的更新和处理[7],因此选择卡尔曼滤波可对中值滤波后的脉冲信号起到很好的滤波效果。
滑动中值滤波器输出的信号中包含偶发的脉冲噪声(窗口较窄时)以及较小的高斯噪声,因此非常容易通过卡尔曼滤波器进行滤除,从而得到理想的液面情况的估计值。
假定距离(液面)匀速变化,即
![]() (1)
(1)
其中[Q]Error: Reference source not found是状态转移噪声矩阵
观测模型
![]() (2)
(2)
其中[R]Error: Reference source not found是观测噪声矩阵
定容停止的依据是状态变量[xn, vn]TError: Reference source not found中对液面距离的估计值xnError: Reference source not found达到预定值xtarget。Error: Reference source not found为了减少定容泵以及液体惯性导致的不确定性过量加液,可以在xnError: Reference source not found低于xtargetError: Reference source not found一定倍数例如0.7倍时减小加液泵速度,同时为了加快vnError: Reference source not found的跟踪速度,可以预先在减小加液泵速度时刻将vnError: Reference source not found减小相应倍数。必要时甚至可以多段减速。
具体实现时可以使用定容泵启动超声波传感器传回的数据作为
xnError: Reference source not found初始值,vnError: Reference source not found可设为0或一个负的经验值(这对于初始时即很接近定容目标值的情况很适用)。随后在均匀的∆tError: Reference source not found时间间隔上读取超声波传感器数值并输入卡尔曼滤波器更新阶段。除了上述减慢定容速度的步骤,最终停止定容泵的条件是预期下个采样点液面距离会低于目标值即
![]() (3)
(3)
此时即可停止加液泵。尽管这可能会造成一个∆t Error: Reference source not found时间间隔内的加液误差,但若其足够小,此误差相对于其他噪声和机械尺寸导致的误差可以忽略。
实际实验结果表明,该方法在不使用复杂的机械结构的情况下达到较为精确的定容结果,如图2所示。图2 (a) 中Raw代表超声波传感器传回的原始数据,可见较为密集的脉冲噪声,这主要是由于液柱遮挡波束导致的;Stage1表示经过滑动中值滤波器后的信号,可见绝大部分脉冲噪声已被滤除,剩余噪声为真实的本底测量噪声,该噪声可近似为高斯噪声,因此容易使用卡尔曼滤波器消除;Stage2代表经过卡尔曼滤波器后的信号,可见除一些数值运算噪声外,基本上各种测量噪声已经被消除。图2 (b) 对比滤波结果与原始数据的关系,图中显然可得最终输出信号是原始信号的无偏估计值,因此可以利用它作为定容终止的判据。
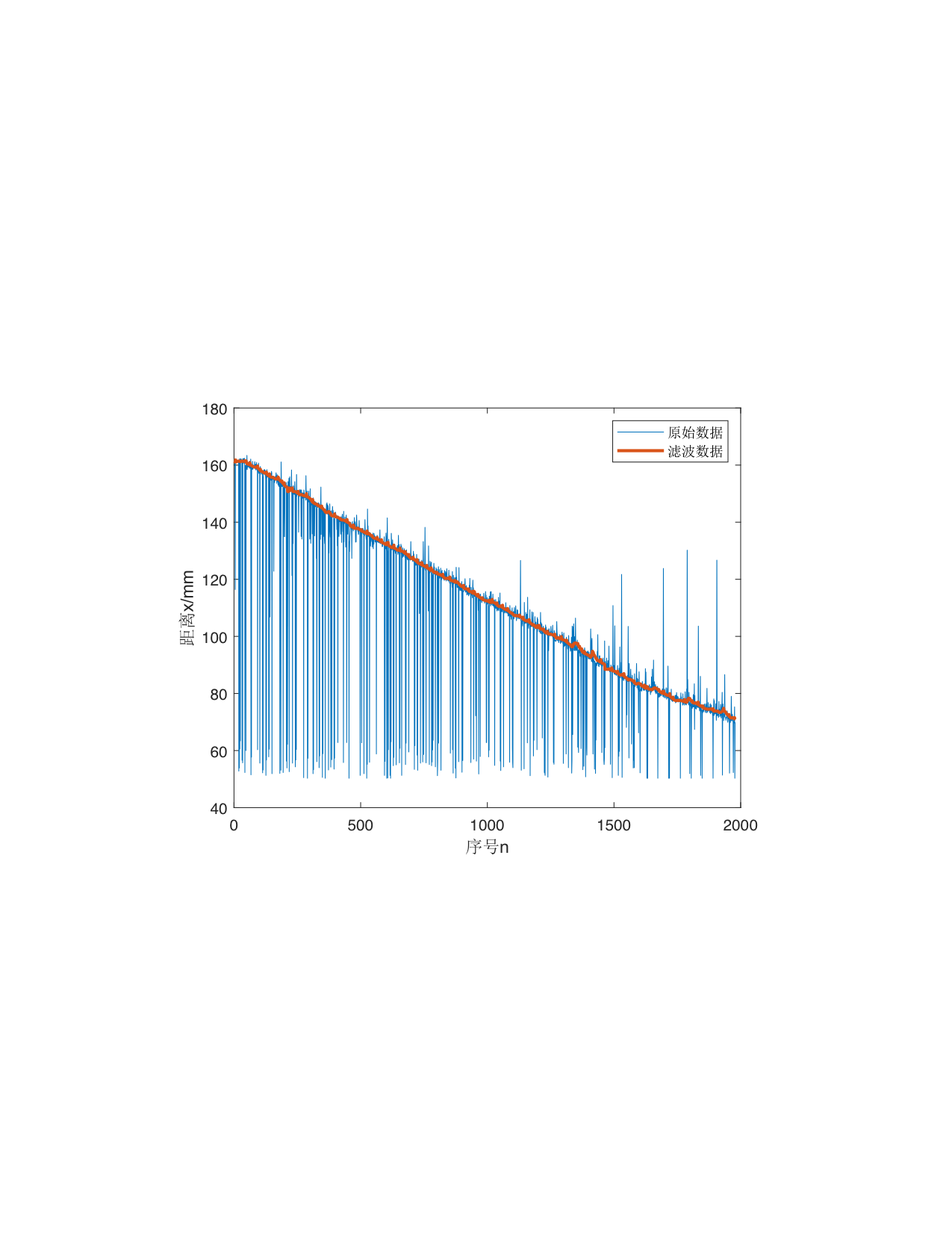
图2 (a) 原始各级信号波形
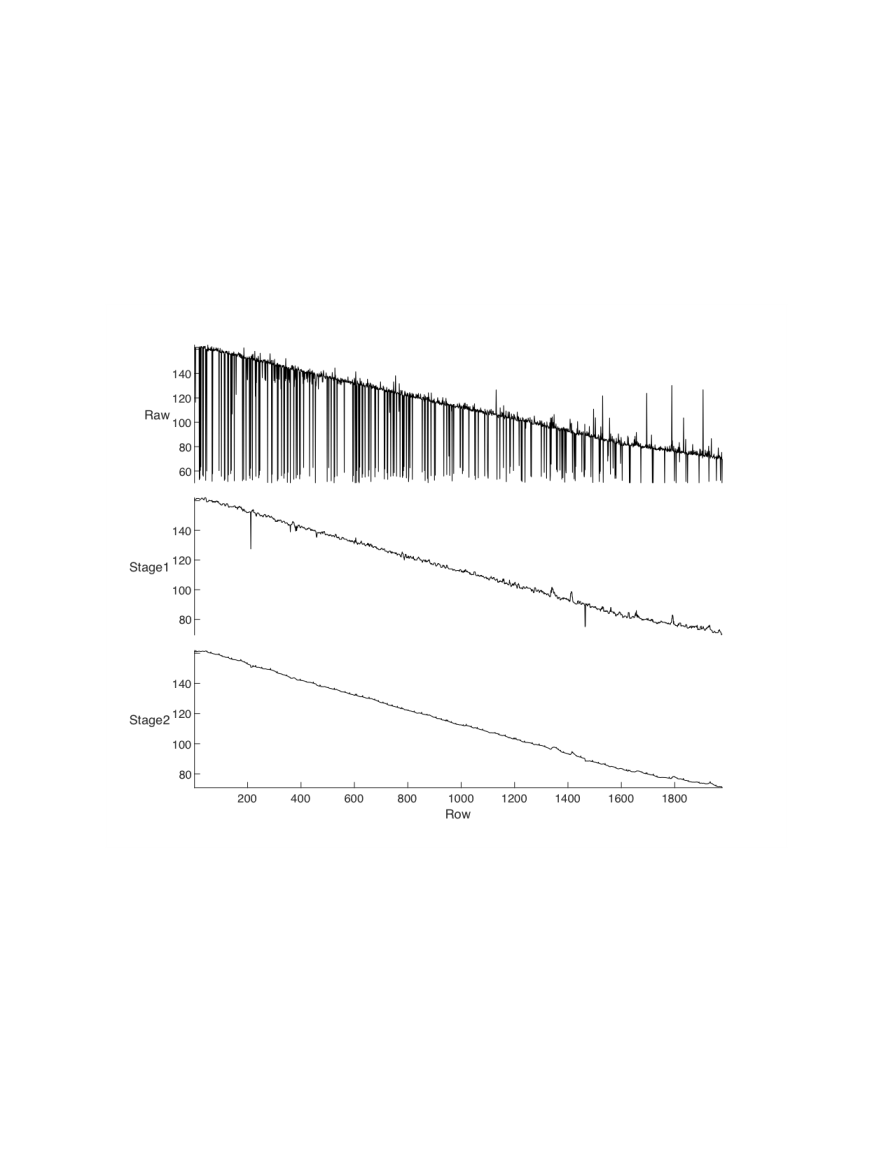
图2 (b)滤波信号对比
实验中使用的超声波传感器频率为200kHz,分辨率为0.1mm,测量周期为35ms;滑动中值滤波器的窗口宽度为6;卡尔曼滤波器的测量噪声方差设为25.0;使用的消解管内径为26mm,超声波传感器换能片距离消解管底部160mm,从0mL开始定容到50mL,设置的目标距离为69.5mm。
经过两次滤波后的多次测定距离为69.843mm、69.946 mm、69.864 mm--;定容误差均在0.4%-1%之间,满足实验室要求的2%以下的误差;能达到预期效果。
特别指出,由于机械尺寸误差、液体和泵的惯性、超声波束在管腔内的驻波效应以及超声波传感器本身具有校正参数等因素的影响,不应使用理论推导的距离值作为目标距离,而应使用实际的某个值作为校正值,在该目标值设定下,实际称量出的液体体积应为目标体积。
袁军成, 胡珊, 王东. 全自动石墨消解ICP-AES法测定污泥中的重金属[J].广东化工学报,2019, 08, 186-187.
赵雯玮, 刘吉爱, 朱红波, 曹叶伟. 全自动消解仪在分析领域的发展与应用[J],西藏科技学报,2015, 11, 79-80.
罗炜程. 全自动石墨消解仪中自动定容的分析与研究[J]. 山东工业技术学报,2020, 161-163.
程静秋, 廖敏立, 梁华华. 石墨消解技术及其在分析检测中的应用[J]. 广东化工学报,2019,46(10), 163-164.
李婧,黄进. 一种图像测量中的快速中值滤波算法[J]. 微计算机信息,2007,23(21), 299-300.
谢少彪,张宇,温凯瑞,张硕,刘宗明,齐乃明. 非合作目标强跟踪容积卡尔曼滤波运动状态估计[J]. 吉林大学学报(工学版),DOI: 10.13229/j.cnki.jdxbgxb
2020374.
白 刚. 卡尔曼滤波在割草机器人路径追踪优化中应用[J]. 农机化研究,2020,8,47-51.
基金项目:河北省环境监测质量控制技术创新中心(SG20182051);河北省高水平人才团队建设专项(199A3903H; 石家庄市科技创新团队项目(208790296A)
作者简介:张福治(1983-9),男,河北石家庄,中级工程师,硕士,设备研发项目负责人,主要从事环境监测设备及实验室设备的研发工作。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



