军事科学院系统工程研究院卫勤保障技术研究所,天津市 300161
提要:机械通气是重症监护医学中的疗法,但这种疗法有时会加重病人的病情。肺组织的机械损伤是呼吸机诱发ARDS患者肺损伤的主要原因。为了避免肺损伤,提出了肺部保护性通气策略。肺保护性通气避免了肺组织的广泛机械应力,从而避免了不可逆转的损害,从而大大改善机械通气的疗效。有效的呼吸力学闭环控制分析是肺保护性通气的前提。该分析基于数学模型,为临床应用提供了基础。
关键词:机械通气;ARDS;肺保护性通气;模型;闭环控制;
一、肺保护性通气
急性呼吸窘迫综合征(ARDS)是一种急性,弥漫性和炎性肺损伤。一项研究评估了需要通气支持的急性低氧血症性呼吸衰竭的患者,重点是ARDS患者。轻,中和重度ARDS患者的医院死亡率分别为35%,40%和46%。有大量证据表明,潮气量过大,肺泡过度膨胀会引起肺实质损伤[1]。
因此肺保护性通气策略提出以减少进一步损害。肺保护性通气策略通常分为以下三种策略:低潮气量(约6mL / kg),低平台压Pplat<30 cmh2O,适当的PEEP。一项研究评价了ARDS机械通气的肺保护性通气策略。比较了较低的潮气量与常规潮气量,医院死亡率降低[2]。
二、闭环控制
闭环控制的医疗设备会自动调整测量的生理参数。在重症监护中,可以自动控制液体复苏,药物输送,机械通气以及麻醉和镇静。
对于机械通气重症患者,可在床旁使用闭环控制技术提供支持治疗。闭环控制设备运行计算机仿真来控制患者生理学的计算模型,使用系统的计算模型来测试硬件设备的控制算法[3]。
三、呼吸机-人体模型
呼吸机-人体模型中的变量可以电学变量来代表[4],如图1所示
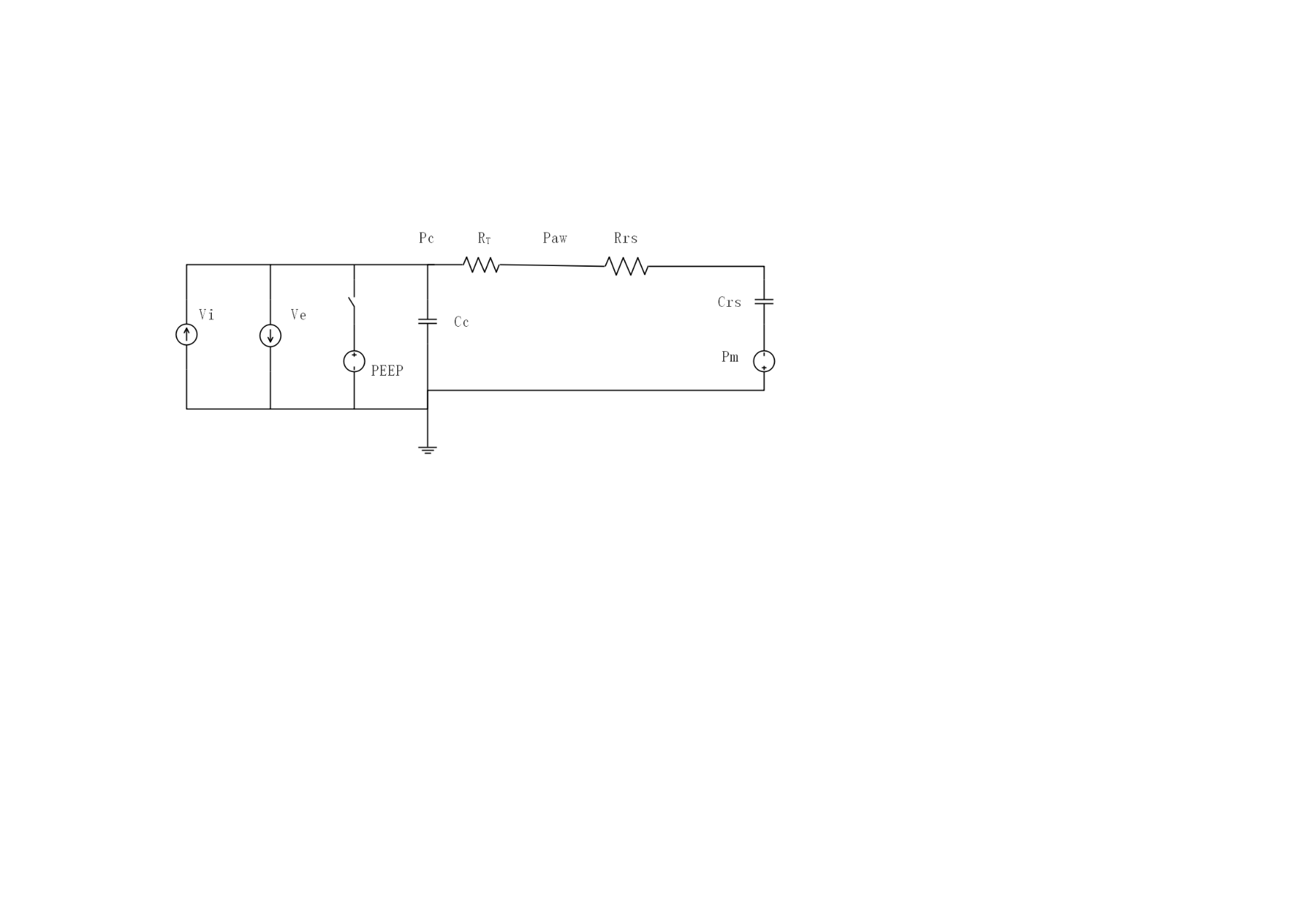



图1呼吸机-人体综合模型
Vi是电流源,表示吸气阀输入的气体流量;
Ve是电流源,表示呼气阀输出的气体流量 ;
RT 和Rrs是电阻,表示呼吸机管路的气道阻力以及呼吸系统的气道阻力;
Ce和Crs是电容,表示呼吸机管路的顺应性以及呼吸系统的顺应性;
PEEP和Pm是电压源,表示呼气末正压以及呼吸肌群的作用力;
四、PID控制
PID是比例、积分、微分的简称。PID控制是当今使用最广泛的控制策略,有超过90%的控制回路采用PID控制[5]。PID控制器的三个参数满足大多数控制问题的三个通用要求。积分控制可滤除较高频率的传感器噪声,比例项会立即对当前误差作出响应[6]。
五、呼吸机控制系统
根据PID控制算法和呼吸系统模型,最终得到呼吸机控制系统框如图2所示。

图5 呼吸机控制系统框图
Pref是设定的目标压力,Paw是气道压力,G(s)是音圈阀的动态特性函数,R是呼吸系统的气阻,C体是呼吸系统的顺应性。
参考文献
[1] Petrucci N, Iacovelli W. Lung protective ventilation strategy for the acute respiratory distress syndrome.[J]. Cochrane Database of Systematic Reviews. 2013(3): D3844.
[2] Rose L. Clinical application of ventilator modes: Ventilatory strategies for lung protection[J]. Australian Critical Care Official Journal of the Confederation of Australian Critical Care Nurses. 2010, 23(2): 71-80.
[3] Wysocki M, Jouvet P, Jaber S. Closed loop mechanical ventilation[J]. International Journal of Clinical Monitoring & Computing. 2014, 28(1): 49-56.
[4] W Yi, Q Zhang, Y Wang, et al. 2009(15): 4892-4895.(In Chinese)
[5] Y Yu, H Wang. 2013, 026(001): 1-3.(In Chinese)
[6] Knospe, C. PID control[J]. IEEE Control Systems Magazine. 2006, 26(1): 30-31.
天津市科技重大专项:“智能化闭环自动心肺复苏反馈辨识-优化调节-协同控制关键技术与装备研究(
18ZXJMTG00060)”
国家重点研发计划课题:“系列伤员搬运工具与生命支持转运装备研发"( 2017YFC0806406)
国家重点研发计划课题任务:“配套化现场急救器材和装备研发”(2017YFC0806402)

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



