中建安装集团有限公司,黑龙江哈尔滨 210000
摘要:项目工程机械是由提升平台、钢丝绳、制动系统及提升系统共同构成的用于实现人员和物料进出井下的装置,具有结构简单、经济性好的优点。随着项目综采作业深度、工程机械的提升速度和载重量不断增加,提升钢丝绳因其柔性结构,在制动和启动过程中会产生力的滞后性,导致工程机械产生巨大的振动和冲击,给人员和物料运输安全造成了极大的隐患[1]。本文结合高速、大载重工程机械的应用特性,提出了一种以PID模糊控制为核心的项目工程机械机电液一体化控制系统。
关键词:工程机械机电液一体化控制PID溢流阀
引言
针对现有的工程机械机电液一体化控制系统在使用过程中液压冲击大、制动力不可调,导致工程机械制动时出现“硬制动”的现状,提出了一种新的项目工程机械机电液一体化控制系统。该系统采用了PID模糊控制算法,对工程机械制动过程中的制动力进行判断,电磁比例溢流阀根据制动力需求调整开度大小,实现了对工程机械的柔性制动控制,有效降低了制动时的冲击,提升了制动可靠性和稳定性。
1工程机械机电液一体化控制系统总体结构
由于项目工程机械在运行过程中存在较大的不稳定性因素,因此为了确保对工程机械制动过程的精确控制,采用了闭环控制调节模式,该控制系统的整体结构如图1所示[2]。
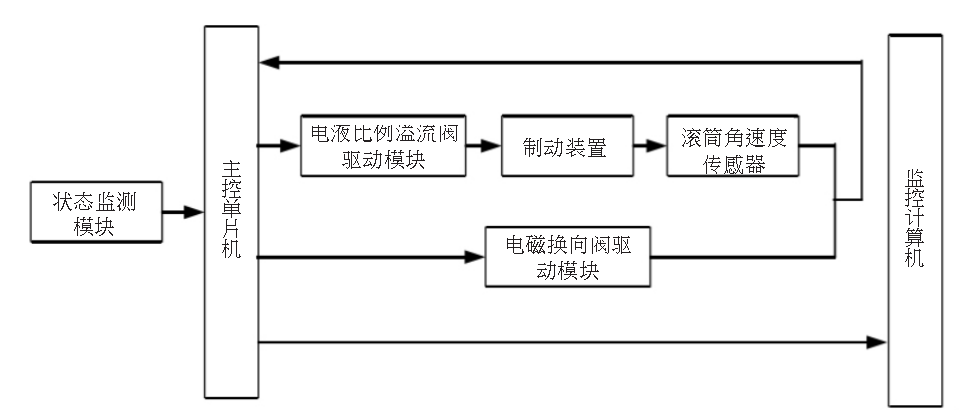
图1控制系统
由图1可知,在该控制系统中,首先由设置在工程机械各处的传感器设备对工程机械运行时的状态进行监测,然后将监测结果传送到系统的单片机内,单片机根据工程机械的运行状态和制动要求,输出机电液一体化控制系统的机电液一体化比例溢流阀开度调节信号,控制制动机构对工程机械提升滚筒的制动力,然后利用设置在提升滚筒上的角加速度传感器对提升滚筒的速度变化情况进行监测,将监测结果返回到主控单片机内,对实际运行状态和理论运行状态的偏差量进行模糊分析,并输出调节控制信号,实现对工程机械制动状态的闭环控制。在控制过程中主控单片机通过控制电磁溢流阀驱动控制模块来实现对电磁溢流阀开度的灵活调整,该控制系统的数据信息传递均通过CAN数据总线和485数据通信接口进行,以满足在恶劣工况下的传输稳定性和便捷性的需求[3]。
2电磁阀驱动控制模块结构原理
该工程机械机电液一体化控制系统的核心,在于电磁溢流阀的驱动控制模块能否根据控制指令,实现对工程机械电磁溢流阀开度的精确调控,为了满足各种工况下电磁溢流阀灵活调整的控制需求,在控制系统中增加了MOSFET反接卸荷组件,实现了对工作过程中油压的连续可调,该驱动控制模块整体结构如图2所示。
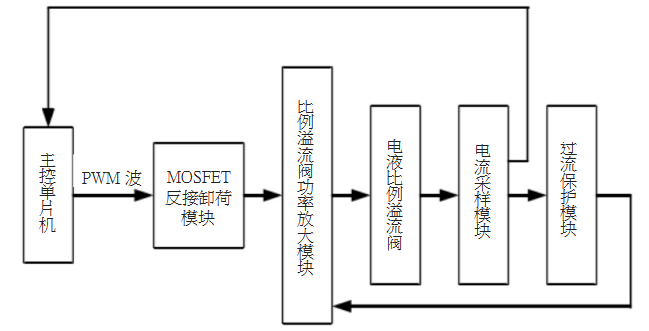
图2电磁阀驱动控制模块结构原理图
由图2可知,在工作过程中主控单片机首先输出制动控制指令,该控制指令以PWM(脉冲宽度调制)[3]数据信号的形式进行发送,将数据信号传递到MOSFET(金氧半场效晶体管)反接卸荷组件内,数据通过电磁比例溢流阀的功率放大模块放大后传输到机电液一体化比例溢流阀中,系统中的电流采样控制模块则对输入的控制电流进行保护,当输入电流超过最大开度电流时,系统自动断开,确保电控元件的控制精确性。在控制过程中系统通过模糊算法,对控制信号
进行分析,实现对PWM(脉冲宽度调制)数据信号输出占比控制,从而实现对比例溢流阀开度大小的精确控制,满足制动力按设定曲线变化的控制需求。
3机电液一体化比例模糊调节控制
PID模糊控制是一种以模糊集合、模糊变量及模糊推论为基础的控制理论。由于工程机械的液压系统在实际工作过程中油压会随着温度、管路状态及制动速度的不同而产生较大的差异,传统的精确控制或者是经验控制方案均难以满足对工程机械比例溢流阀开度的控制需求,因此只能通过采用PID模糊控制的方案再加上反馈控制回路来实现对比例溢流阀控制状态的动态调节,满足柔性制动的需求。在对数字量信号进行模糊化处理的过程中,系统首先根据控制器的设定值和工程机械提升滚筒的运行速度信号之间的偏差为调节基础,在模糊控制器内经过模糊量化处理、模糊规则控制、模糊策略决策和模糊化处理等过程获取最终的控制变量,实现对比例溢流阀开度大小的控制,最终反映到对制动压力的控制。
4工程机械制动控制系统的应用
为了对该机电液一体化控制可靠性进行分析,以某型立井工程机械机电液一体化控制系统为例,对其进行升级改造,然后对载荷为4.5t,运行速度为3.5m/s情况下的制动情况进行研究,结果如图所示。
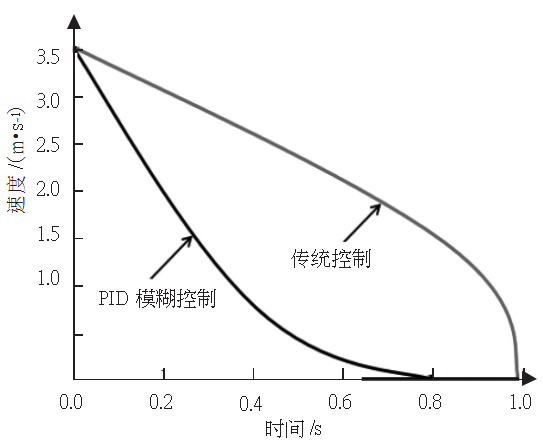
图3不同控制模式下的制动速度曲线
由图3可知,当采用PID模糊控制时,在0~0.4s内速度快速下降,在0.4~0.8s内系统速度开始平稳下降,从而有效确保了制动的平稳性,当采用传统控制模式,在0~0.9s内速度下降较慢,但在第1s时,制动系统突然抱死,虽然实现了制动,但产生了极大的振动和冲击。而且对比传统的控制模式,PID模糊控制在实现平稳制动时的制动速度降低了20%,极大提升了工程机械系统的运行稳定性和制动灵敏性。
5结论
PID模糊控制的方案,能够确保工程机械在各类工况下对液压系统压力的精确监测,实现对比例溢流阀开度大小的精确控制,是实现工程机械柔性制动的基础;新的工程机械机电液一体化控制系统在制动过程中的制动时间比传统控制方案缩短了20%,但制动更加平稳,有效提升了系统的运行稳定性和制动灵敏性。
参考文献
[1]宋俊毅,陈斌.论项目工程机械制动系统安全可靠性分析[J].国防
制造技术,2017(3):51-52.
[2]崔培雪,孟凡英,李秀玲.基于机电液一体化比例控制技术的液压系统升级改装方案探讨[J].机床与液压,2016,44(14):195-196.
[3]康永玲.基于PWM技术的机电液一体化比例控制系统的研究及应用[J].煤矿机电,2017(2):28-32.
[4]俞宏福,毕健健,殷晨波.液压挖掘机机电液一体化比例系统模糊PID控制联合仿真研究[J].建设机械技术与管理,2017,30(12):52-55.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



