三峡大学 电气与新能源学院
研究背景:以疫情期间对物品安全传送等问题引发的思考,提出基于西门子PLC的控制小车的方案,用以解决这些货物流通消毒以及自动控制等问题。方案以西门子PLC(CPU1214C DC/DC/DC)为控制核心,通过识别特定编程实现对小车的实时控制。该方案能实现小车的前进,后退等功能;该方案可规划路径,具有使用便捷,更友好的人机交互功能;可应用于医院、学校、工厂等流水线、超市、仓库等场所货物搬运的需求,以提高货物搬运的效率并降低劳动力成本。具有人力成本和时间成本低的特点,使得本方案具有良好的市场前景。这种经济优势是传统的货物配送方式所无法比拟的。本方案采用最简配置(可扩展功能:触屏系统、语言控系统、遥控系统、智能循迹系统等)。产品设计方案(本方案为最简配置)
设计方案
一 基本架构:
自动定位示意图
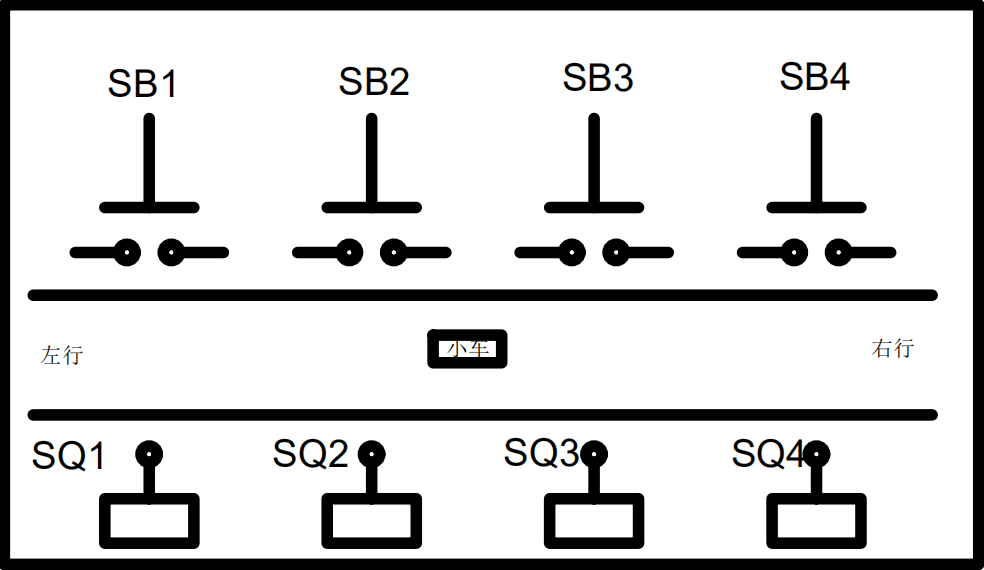
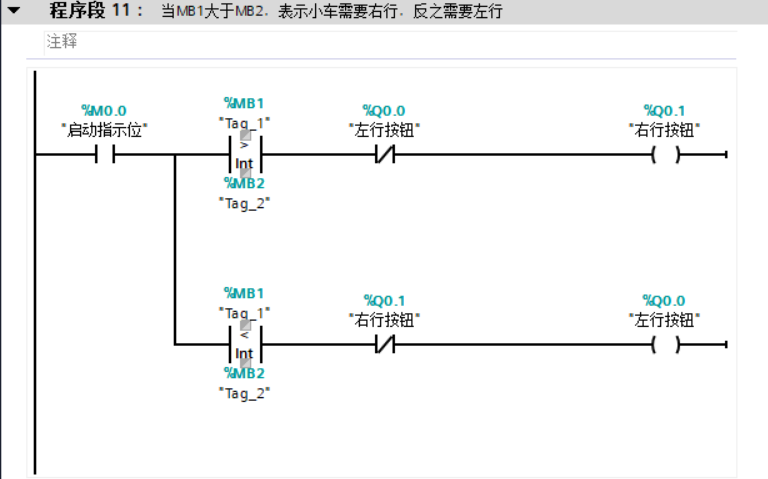
功能描述:当小车所停位置限位开关SQ的编号大于呼叫位置按钮SB的编号时,小车向左运行到呼叫位置时停止;当小车所停位置限位开关SQ的编号小于呼叫位置按钮SB的编号时,小车向右运行到呼叫位置时停止;当小车所停位置限位开关SQ的编号等于呼叫位置按钮SB的编号时,小车不动作。
基本构成:1.核心元器件:SIMATIC S7-1200(CPU1214C DC/DC/DC)
2.小车 SB1-SB4 SQ1-SQ4
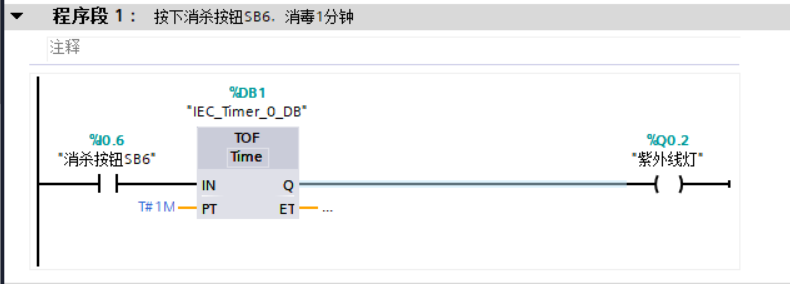
3.紫外线灯一套
PLC外部接线参考图
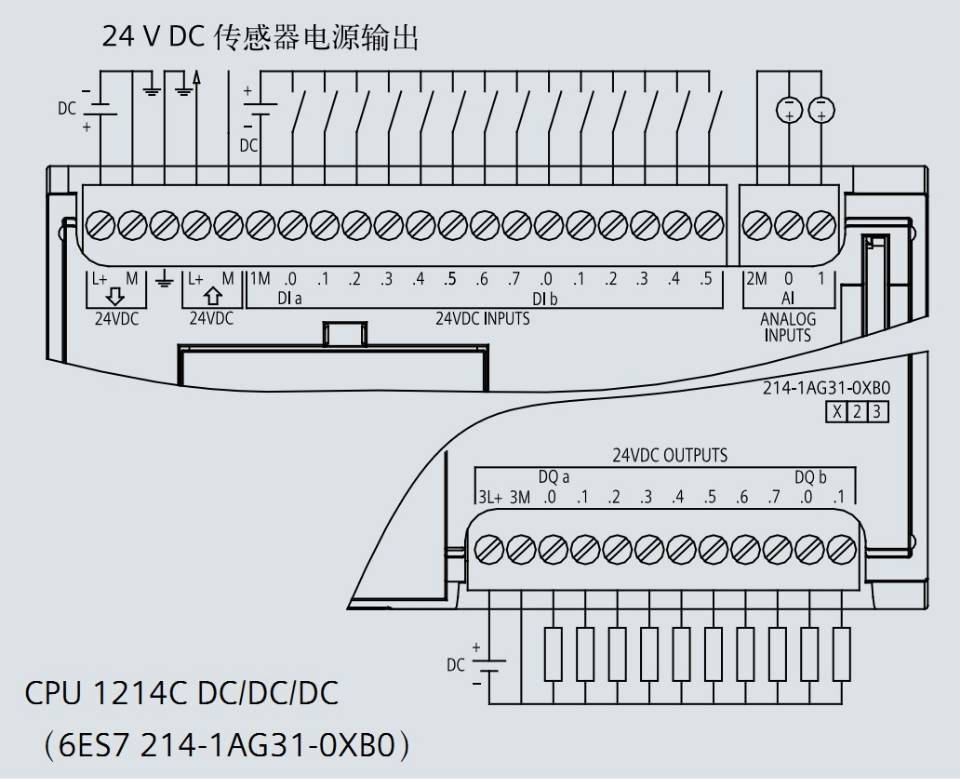
PLC的I/O分配表
类别 | 元件 | I/O点编号 | 备注 |
输入 | SB0 | I0.4 | 启动按钮,常开 |
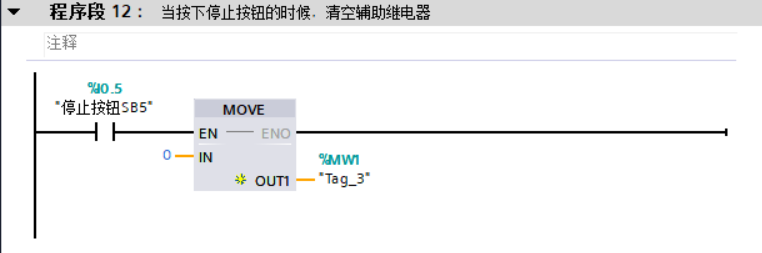
SB5 | I0.5 | 停止按钮,常开 | |
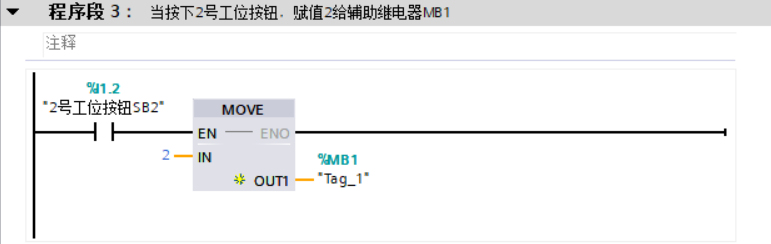
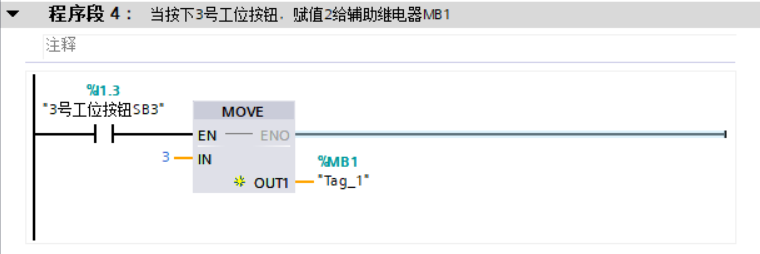
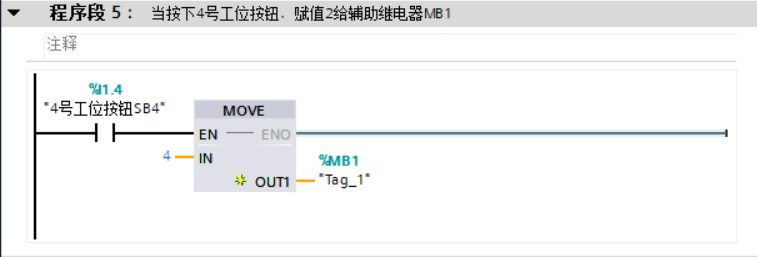
SB1-SB4 | I1.1-I1.4 | 四个位置的呼叫按钮,常开 | |
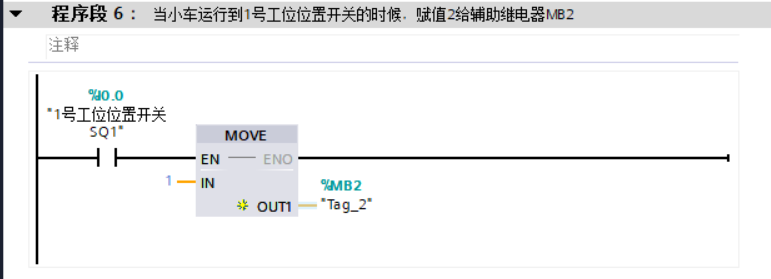
SQ1-SQ4 | I0.0-I0.3 | 1#-4#位置开关 | |
输出 | KA1 | Q0.0 | 小车左行继电器线圈 |
KA2 | Q0.1 | 小车右行继电器线圈 |
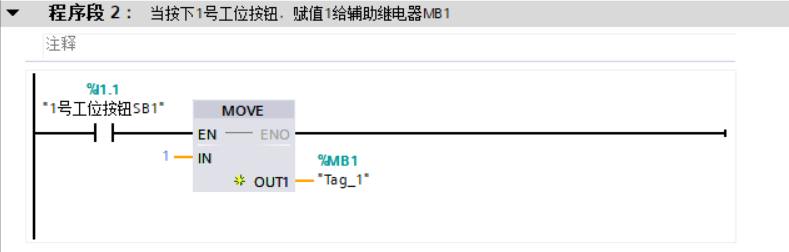
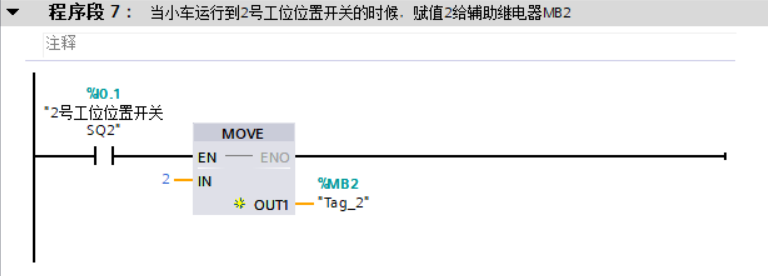
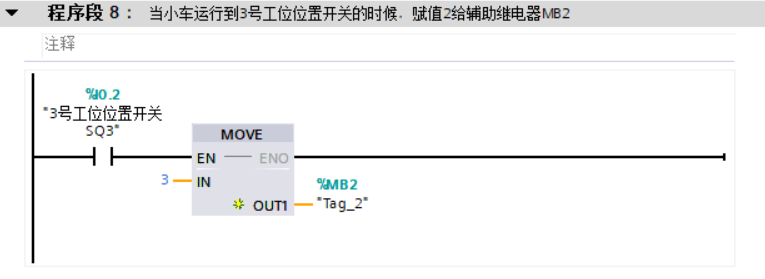
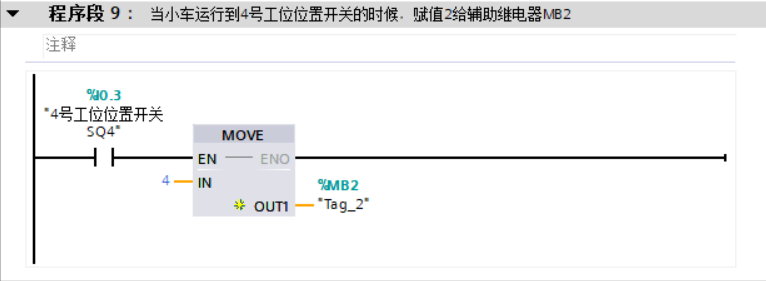
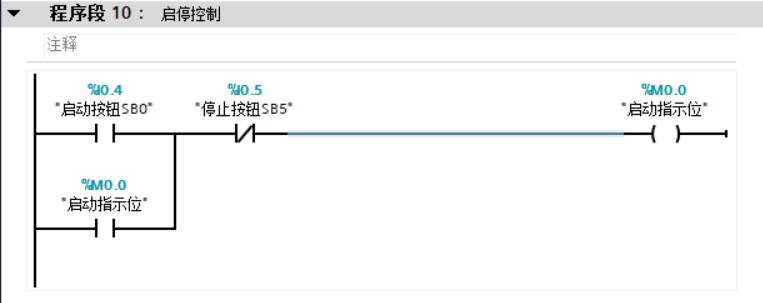
工作流程图及操作指令执行过程
二 系统安装调试
第一次使用本方案需要对主机系统、通信网络和小车进行安装调试。本过程需要专业技术人员对应用现场进行考察,以确定符合实际现场的控制要求的解决方案。本阶段工作任务主要有:
1)对小车进行安装调试
2)对整个系统的运行进行调试
3)对企业相关人员进行操作培训和系统介绍
三 产品优势
这种全新的小车相较于市场常见的配送工具有以下优势:
1、人力成本低:人员只需要人机界面操作,不需要直接参与配送工作,这种间接的配送方式,大大降低配送工作对配送人员的身体素质要求,实现了对社会人力成本的节约和优化配置。
2、时间成本低:配送人员利用小车的高效执行能力,满足不同重量货物的配送要求且不需要休息,实现了对于货物配送工作效率的大大提升,从而节省了配送工作的时间成本。
3、适应能力强:由于超市或仓库等场所的的配送工作环境复杂,人工智能等算法无法可靠实现配送工作。而本产品由人机界面提前编写路径去操纵小车进行配送动作,并非由编程实现完全自动化的控制,故能够应对各种情况下的配送任务。因此具有配送适应能力强的特点。
4、提升企业形象:机器人的使用在提高效率降低成本方面的同时,能够有效改变人们对于传统配送工作的认识,在客观上能够为提升企业形象带来推动作用。
5、顺应时代潮流:由于我国人力成本不断攀升,而各种行业配送工作依旧是劳动力密集型行业。恰恰本产品能够有效降低人力成本并提高配送效率,能够顺应当前以机器人替代人实现的人机协作的时代潮流,也积极响应了国家供给侧改革的大方向。
指导教师:卢云、谭超、曾红龙

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



