(宿州学院机械与电子工程学院 安徽宿州 234000)
【摘要】本文介绍的是个实用且意义比较大的控制系统:安全车距的测量与提醒。
此系统由多个模块组成主要有测速模块、测距模块、蜂鸣器模块。本系统的大致逻辑为:在小车前进的时候,对与前方车辆的车距进行测量,因为不同的速度所需要得安全车距大小不同,因此我们根据将车速与车距两个量进行整合,对各个速度下的车距进行计算并与理想安全车距进行比对,若车距小于安全车距,则蜂鸣器响,起到提醒的作用。此系统通过车距方面,提醒驾驶员注意,从而使得交通事故发生率下降。
【关键词】激光传感器 测速模块 stm32f4
现实中的交通事故的发生原因有很大一部分是因为驾驶员没有把握好安全车距,即使是驾驶年龄较长的驾驶员往往都会忽视这个问题,所以安全车距的测量与提醒系统可以有效的提醒驾驶员在车辆行驶的时候控制车距,从而有效的减少因车距问题而发生的交通事故。
一、系统总体设计
1、系统总体框架
1.1主控框架
本系统用单片机做主控,多传感器使用,通过对传感器数据的处理来实现功能。
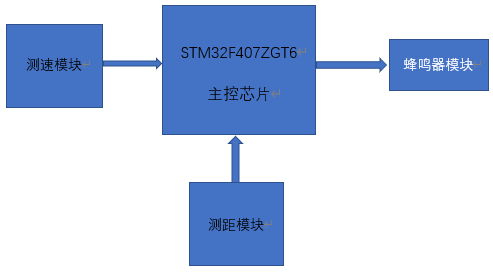
1.2逻辑框架
2、主控芯片
主控芯片拟选用 STM32F407ZGT6,STM32F407ZGT6是由 ST(意法半导体)开发的一种高性能微控制器。 其采用了 90 纳米的 NVM 工艺和 ART 由于采用了 ST 的 ART 加速器,程序从 FLASH 运行相当于 0 等待更多的存储器多达 1MB FLASH。
3、测速模块
采用槽型对射光电传感器,由一个红外发光二极管和一个NPN光电三极管只要非透明物体通过槽型即可触发输出TTL低电平。测速传感器输出为脉冲信号,一个脉冲中断一次;红外射线导通的时候是低电平,所以我们设置中断为低电平触法模式。一般码盘上有整数格子,例如 10 格码盘,也就是有 10 个空格子,电机转一圈后便是射线导通 10 次,外部低电平触法 10 次;我们用一个 MCU 定时器计算,1 秒内接收多少个外部中断,例如一秒内接收了 20 个 外部中断,我们就可以判断小车速度为 1 秒小车轮子转两圈,然后再计算出小车轮子的周长,就可得知小 车 1 秒行驶的速度。
4、测距模块
激光传感器用北醒光子科技的TFmini,主要用来测距。TFmini 基于 TOF(Time of Flight)即飞行时间原理。具体为产品周期性的向外发出近红外光调制波,调制波遇物体后反射。产品通过测量调制波往返相位差,得到飞行时间,再计算出产品与 被测目标之间的相对距离。
二、拟定参数与其计算
设车辆行驶速度为V(km/h);车到前车距离为l(m);当前速度V下的理想安全车距L。 依据交通法规规定,当V<=20时,L>=10; 当V<=40时,L>=30; 当V=50时,L>=50; 当V=60时,L>=60; 当V>100时,L>=100。
分析如上数据得出在小车模拟情况下:设车辆行驶速度为V(cm/s);车到前车距离为l(cm);当前速度V下的理想安全车距L。当V<=50时,
L=(V%+0.5)*V;当V>50时,L=V。
三、结论
由于在实际驾车过程中,若不考虑换道,自身车辆与前车应保持相对静止,否则会发生追尾事件,因此在实际测试过程中我们采用前车静止的方法进行模拟。我们用预先设定好的速度进行测试,分别用不同车速模拟实际情况。由于前车是静止的,我们在程序编写加入了降速控制,即蜂鸣器响时大幅降低车速,用于体现驾驶员的实际反应。经过测试,实际效果良好。
【参考文献】
TFmini 使用说明书 北醒(北京)光子科技有限公司
项目编号:201910379007.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



