国网江苏省电力有限公司检修分公司常州运维站 , 江苏 常州, 213161
摘要:科技的快速进步,推动了电力行业的发展,在此背景下,智能电网以及超高压和特高压的建设工作正在稳步展开,这就使得过去那种的常规的运检模式无法满足需要。智能巡检机器人的出现,很好地解决了这方面的问题。智能巡检机器人系统根据预先设定的参数,自主启动完成例行巡检任务或运维人员远程遥控机器人完成特巡任务,同时将检测设备采集到的可见光图像、红外图像、声音等信息上传至监控后台;并在恶劣天气或者变电站设备发生故障时,由遥控机器人到达故障现场,避免运维人员在现场可能遭受的人身伤害。接下来,就变电站巡检机器人应用展开分析和探讨。
关键词:变电站;巡检机器人;具体应用
引言
对变电站电气设备的运行状况进行定期巡检,是确保变电站安全稳定运行、保证电力供应稳定性的关键。采用巡检机器人代替传统的人工巡检模式,实现变电站电气设备运行的自动化巡检,以减少传统人工巡检的各种问题因素,对确保变电站电气设备的安全稳定运行甚至推进国家智能电网建设都有着十分积极的作用和意义。
1变电站巡检机器人的系统组成与结构分析
超高压变电站巡检机器人利用导航定位技术,结合可见光摄像机、红外热像仪、超声传感器、激光传感器等先进传感器实现最优路径规划、自动充电、采集设备图像等功能,通过无线传输技术将所有信息与数据发送到控制中心,利用图像处理和模式识别等技术实现对设备热缺陷、短路状态、温度检测等情况的判别;对仪表读数、油位计位置的识别。变电站巡检机器人整体结构如图1所示。
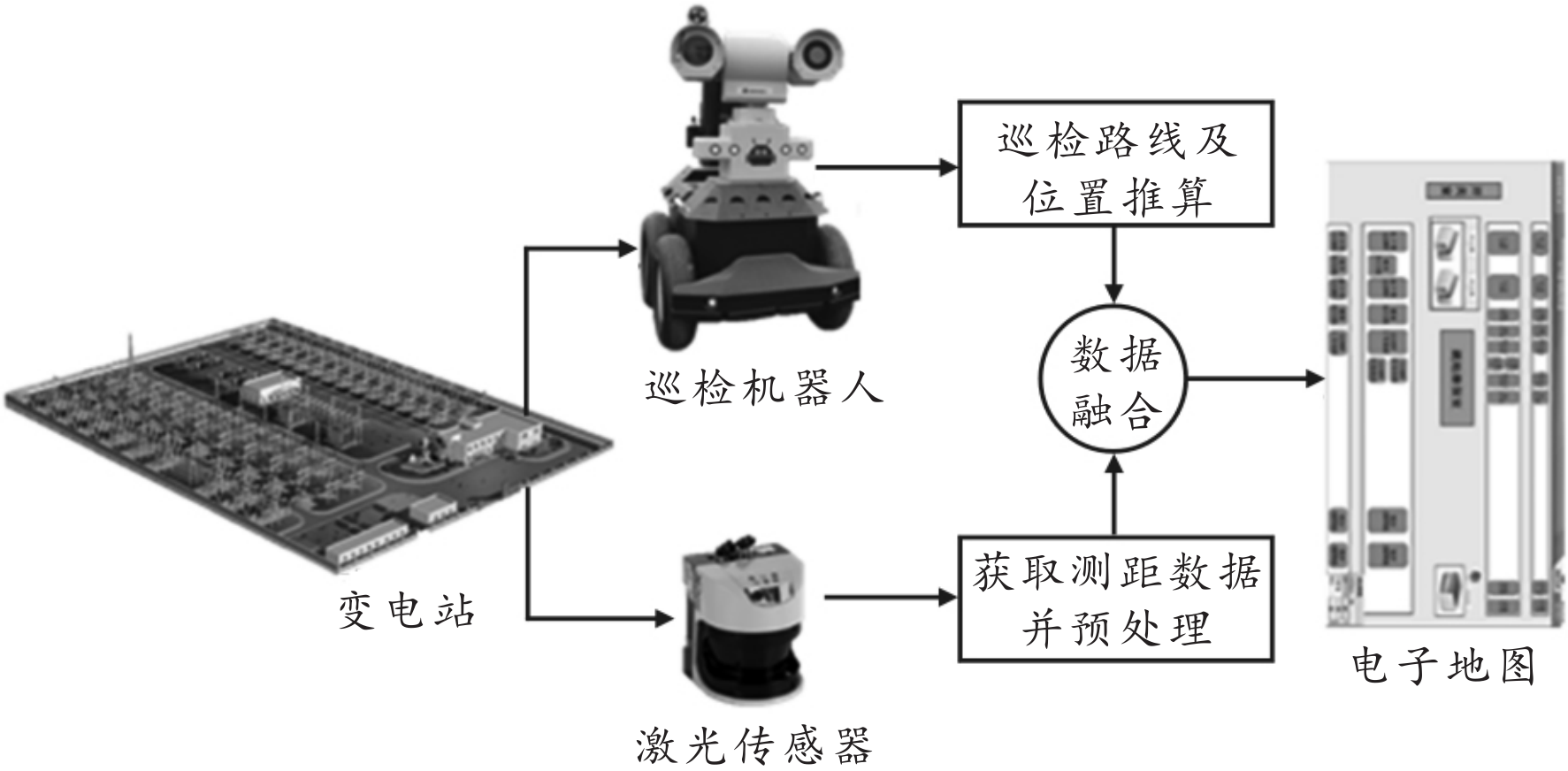
图1巡检机器人外观图
2变电站巡检机器人的优越性
通过机器人自动巡视即可完成变电站全部户外设备的常规巡视工作,包括一次设备的红外测温、噪声检测等工作;切实减轻运维人员工作负担;可自动识别表计读数,具有设备缺陷智能预警功能,可将巡视所得数据自动生成巡检报表上传至本地监控平台;安全方面,巡检机器人巡检内容全面、巡检效率高,且巡检结果稳定可靠,有效避免设备缺陷遗漏的可能,减少变电站事故发生。
3变电站巡检机器人应用
3.1智能巡检机器人在变电站中的实际应用
国网江苏省电力有限公司检修分公司常州运维站某500kV变电站配置了1台智能巡检机器人系统,并配备与之配套的1个机器人充电室。该机器人将变电站按电压等级、设备类型分为3个巡检区域、6个巡检任务进行巡视,包括:500kV区域红外任务、500kV区域仪表任务、220kV区域红外任务、220kV区域仪表任务、主变及110kV区域的红外及仪表任务。
上述任务均支持定时自动开启及手动开启两种开启模式。每一次巡检任务执行完毕后,智能巡检机器人会自动返回充电室,并开启充电接口进行充电。如巡检机器人在巡检任务进行过程中,接收到后台机发出的的特殊巡视指令,机器人将自动暂停当前的巡检任务,并根据当前机器人所处位置,重新规划出最佳巡检路径,对指令设备进行特殊巡检。
3.2智能巡检机器人存在问题与解决方案
(1)对二次设备及直流系统巡检功能的缺失
目前大多数已投入运行的智能巡检机器人基本能够完成对站内一次设备的全面巡检,但由于站内直流系统及二次设备多位于变电站独立的小室或是主控楼内,且室内设备的门口均设置有防鼠挡板。这客观上给巡检机器人设置了“路障”,使之无法有效地对此类设备开展巡视检查工作。然而,站内直流系统及二次设备对变电站的安全稳定运行同样至关重要。因此,使巡检机器人能够有效发挥自主判断,对二次设备与直流系统完成巡检是必要的。
解决方案:首先,对现有的保护室或主控室其中一个门进行改造,改造成类似机器人充电室的自动卷闸门,当巡检机器人靠近时可以自动开门,进入后自动关门。从而也可以避免小动物误入室内。其次,对于新建变电站在规划设计时,可以考虑将机器人的充电室与保护室设置到一起,统一规划、设计巡检路径,从而顺利解决其对室内二次设备及直流系统的巡检问题。
(2)对雾霾天气的抗干扰能力不强
近年来,在雾霾天气日益频发的北方地区,采用激光制导的智能巡检机器人可能会受到雾霾天气的影响。由于激光束在雾霾环境中会受到水分、尘埃等的影响,发生折射现象而发散,导致激光定位及导航失效。从而造成巡检机器人巡检质量下降,甚至不能完成指定巡检任务等情况的发生。因此,需改善巡检机器人在大雪、大雨尤其是雾霾等恶劣天气下的激光定位及导航能力。
解决方案:对于雾霾多发地区,可适当增大变电站智能巡检机器人激光导航系统的发射功率,通过大功率发射激光束保证机器人在特殊天气下能有效定位。
(3)表计位置不合理使巡检数据存在偏差
变电站智能巡检机器人通过搭载的高清摄像头可以对压力、油位、避雷器泄漏电流等表计进行读取,为运维人员提供比较准确的巡检数据,但它仍存在弊端。
首先,有些压力表、油位计相对于地面的位置过高、夹角过大,当巡检机器人行进到固定监测点位时,机器人云台摄像头对目标设备或表计亦有着相对较为固定的角度。不利于巡检机器人的观测。其次,针对人工巡视而设计的压力表、油位计,客观上也对机器人采集数据造成了影响。例
如,有些压力表隐藏于设备表面下部或是表计指针过小而不方便机器人采集数据。
解决方案:对位置偏高或设计存在缺陷的压力表、油位计可以在设备周围适当的位置放置反光镜,应用镜面的反射原理,将表计“转移”到适合观测的位置,以兼顾人工观测和巡检机器人观测两种巡检方式。
(4)现行单站巡检通信模式的弊端
如今,多数配置智能巡检机器人系统的变电站采用的均为单站巡检通信模式。而国网公司“三集五大”改革后,500kV变电站值班人员较少,平时的工作量较大,运维人员对于获取机器人最新巡检数据在时效上可能表现不及时,这就可能延误某些异常或故障的处置时间,给变电站的安全稳定运行带来风险。
解决方案:首先,将变电站巡检机器人的控制权通过有线或者无线网络,集中自动上传到集控站后台机,并设置主动提醒功能,方便运维人员实时获取所辖任意变电站的巡检数据。其次,可以在机器人后台机操作系统中增加一种信息发送功能,允许后台机自动将设备运行告警信息以短信形式发送到运维人员手机等移动终端上,从而方便运维人员及时掌握机器人巡检发现的异常信息,提高运维质量和效率。
4结语
总之,变电站巡检机器人的应用技术研究,有利于促进变电站巡检机器人关键技术在其系统设计中的实现,从而推动巡检机器人的推广应用,对变电站运行维护自动化与信息化建设和提升有着积极的作用与意义。
参考文献:
[1]彭林,王绍亚.巡检机器人在无人值守变电站的应用探究[J].电子世界,2017(1):157-157.
[2]杨从赞,钱平,徐嘉龙.变电站巡检机器人应用与技术分析[J].工程建设与设计,2017(24).
[3]陈晨,黄铮.智能巡检机器人在变电站日常运维及缺陷跟踪方面的应用[J].科技风,2018(18).
[4]刘介玮,周向斌,许宜昉,等.面向变电站设备运行状态监测的智能巡检机器人系统设计[J].自动化与仪器仪表,2019(6):62-64.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



