国网南京供电公司 江苏省 南京市 210000
摘要:21世纪对能够自主规划路线,实现自主避障功能的机器人需求不断增加,人们越来越希望依托于智能技术提供方便快捷的生活方式,期待用机器去代替人类去完成一些繁重的工作,例如仓库巡检、校园巡检等。
关键词:机器人;智能巡检系统;安全隐患
1导言
随着科学技术的进步以及人工智能计算的飞速发展,各种输变电系统工程日趋大规模、复杂化,一些新高压等级、新技术的大量应用,促使传统巡检运行方式、操作方法面临着巨大的挑战。当前较为主流的巡检管理系统方法,大多数依然需要人工来实现,效率低下,工作量巨大,且工作上容易出现差错,工作者自身的安全也得不到保障。且工程设备的部件数量、子系统数量众多、交联关系复杂,单纯依靠人工巡检,已经无法满足需求。未来阶段如何有效巡检高压电网运行,采用新技术、新手段以降低输变电工程中值班人员的工作负担,有效保证设备的正常运行,是十分重要的问题。
2智能巡检机器人的作用
智能巡检机器人能够代替人工实现远程例行巡检工作,有效减少人工,实现巡检工作的智能化,人工巡检和智能机器人巡检对比分析如表1所示。智能巡检机器人作用主要分为6个方面:(1)智能巡检机器人能够定点、定时、定路径巡检,有效提高巡检工作的工作效率和质量;(2)视频监控,智能巡检机器人能够携带定制摄像头,通过视觉识别技术进行有效监控,自主完成巡检任务并传回相应数据信息;(3)数据分析,智能巡检机器人能够针对采集的数据信息进行分析判断,将相应的分析结果通过系统传输到客户端,有效提高巡检工作的工作效率;(4)红外测温,智能巡检机器智能巡检机器人能够识别指针、数字、位置、颜色等多种信息,提高巡检工作的质量;(5)自动回充,智能巡检机器人具有自动导航功能,能够在巡检结束后,能够根据充电基座发出的信号,导航回到充电基座进行充电。
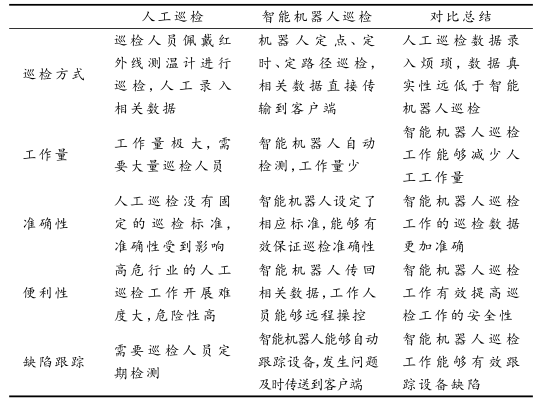
表1人工巡检与智能机器人巡检对比分析
3智能巡检机器人系统的设计方案
智能巡检机器人系统功能的结构主要包括视频采集模块、指标体系数采集模块、中控端控制模块、移动终端控制模块、数据处理模块、语音识别模块和通信模块。其运行机制为,通过语音识别模块、移动终端控制模块和中控端控制模块,控制智能语音巡检机器人行走,到达指定位置。然后智能巡检机器人通过指标体系数采集模块,对巡检对象的相应指标检测,并通过视频采集模块将巡检对象的相应主要图像,通过通信模块和传输到客户端,完成智能巡检机器人的巡检工作。
3.1巡检机器人系统架构组成
巡检机器人系统架构层次主要分为展现层、数据层和检测层。其中检测层主要体现在智能巡检机器人的视频采集模块和指标体系数采集模块中,数据层主要体现在智能巡检机器人数据处理模块中,展示层主要是将智能巡检机器人的相关数据信息,通过客户端展示出现,远程操作如图1所示。而巡检机器人的系统架构主要由软件平台、轨道总成、供电总成和通信总成四个方面组成,主要表现为采用供电系统,引导智能机器人按照目标检测物前进,并将相应的数据进行通过通信模块传送到软件平台,实现智能巡检机器人的巡检工作,如图2所示。
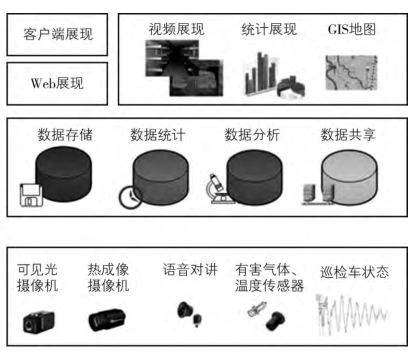
图1 巡检机器人系统架构层次

图2 巡检机器人系统架构组成
3.2智能巡检机器人平台软件系统
智能机器人巡检系统包括实时监控、信息查询、自主巡检、特殊巡检、遥控巡检等功能子系统。
3.3平台大数据分析与决策支持系统
大数据分析与决策支持系统可以对包含红外测温影像,可见光影像和音频图谱进行分析;根据监测系统实时传送的检测数据,利用红外测温、有害气体浓度、可见光影像识别技术进行识别,对于异常信息进行报警,自动判别缺陷及其风险程度,推送预警信息。
4智能巡检机器人系统的技术设计
4.1视频采集技术
智能巡检机器人需要配备较高的视频采集技术,可以采用Video4Linnx内核驱动,是目前市面上最常见的电视捕获卡和USB接口摄像头提供统一的编程接口。将其摄像头安装到智能巡检机器人中,通过相关程序能够控制摄像头的位置和角度,能够从多角度进行视频、图片采集。同时,为了提高视频采集数据的实时性,提高数据传输的速率,在视频采集技术中,在视频采集库中设计一个缓冲池用于保存视频采集图像,需要利用视频设备的双缓冲作用,满足一边采集视频图片一边传输到客户端的采集效果。
4.2指标数据采集技术
智能巡检机器人系统中需要按照多方面的传感器,来提高数据监测的准确性。例如,在智能巡检机器人系统中安装红外温度传感器、湿度传感器、气体传感器、温度传感器等,在设备监测中,采用红外温度传感器,测量设备的运行问题,进行设备缺陷跟踪检查;在地下管道巡检工作中,利用气体传感器,监测地下管道的危险气体,为地下工作者提供安全保障。
4.3导航技术
智能巡检机器人系统需要提高导航技术,能够促使机器人利用传感器采集到周边的环境信息,从而有效确定机器人的位置,实现机器人在巡检工作的定点、定时、定路径巡检。目前的导航技术主要有:(1)GPS导航,利用空间采集信息、地面控制和技术人员的装置接受来实现智能巡检机器人的定位和导航工作,具有信息传输快、实时定位的应用特点,但若在信号较差,例如地下管道巡检工作中,导航能力将受到阻碍。(2)激光导航,利用机器人自身发射的激光束,碰到目标地点后返回,根据发射接收的时间,来确定目标地点的距离,时间定位和导航工作,但在应用中,受工作介质影响。(3)视觉导航,利用机器人的视觉功能获得外界的信息,从而确定机器人的位置信息,进行自主运行和导航,具有开发成本较低,导航精度较高的优点,是目前智能巡检机器人系统中较好的导航技术。(4)SLAM自主定位导航技术,是指解决智能机器人的地图构建和即时定位问题,让智能机器人与所处环境进行自主交互,
4.4语音识别技术
智能巡检机器人系统中的语音识别技术,是工作人员和机器人最直接的交互方式,能够有效传递信息。因此,需要在系统中将语言模块直接连接开发板中,并通过开发板对智能巡检机器人进行语音控制。智能巡检机器人由开发板的麦克风接口采集到语音信息后,采用语言识别模块分析语言数据,发布相应的驱动指令来驱动机器人电机,从而实现对机器人的运行控制。
5结语
综上所述,智能巡检机器人在目前的巡检工作中,具有高效、高精准度、高安全性、低成本的特点,因此有效提高智能巡检机器人系统,优化智能巡检机器人系统技术是非常重要的。智能巡检机器人系统功能的结构主要包括视频采集模块、指标体系数采集模块、中控端控制模块、移动终端控制模块、数据处理模块、语音识别模块和通信模块,在系统设计上,需要从视频采集技术、指标数据采集技术、导航技术和语音识别技术四个方面优化智能巡检机器人系统技术,促进巡检中智能机器人的发展。
参考文献
[1]刘贞瑶,高方玉,姜海波,蔡光柱,郭嵘,何野.输电线路智能巡检机器人系统的研制及应用[J].电力信息与通信技术,2019,17(08):57-62.
[2]常亮.输电线路巡检机器人控制系统研究[D].辽宁工程技术大学,2019.
[3]孙晓迪.智能巡检机器人在变电运行中的应用[D].山东大学,2019.
[4]郭亚杰.变配电所设备智能巡检系统的研究与开发[D].合肥工业大学,2019.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



