成都理工大学工程技术学院 四川省乐山市 614000
摘要:传统飞行器设计方法中,在总体布局时根据任务需求主要考虑飞行器的气动,结构与动力系统的设计因素,通过三者之间的协调使飞行器满足任务目标的要求。随着现代飞行器的发展,仅靠气动,结构与动力三个系统之间的协调已经难以满足任务需求,越来越多飞行器在总体设计初步阶段就将控制系统与控制规的设计和传统气动,结构与动力系统的设计相结合起来,使之成为总体布局设计中的第四大因素,在传统的三大系统发生矛盾时起到积极的协调作用。本文利用经典控制法先对飞行器控制系统数学建模,再对其参数进行优化设计。
关键词:飞行器控制系统 系统设计 数学建模 参数优化设计
一.飞行器控制系统数学模型
某飞行器控制系统俯仰通道由舵回路,阻尼回路和加速度回路组成,其结构如图1-1所示。

图1-1
舵回路如图1-2所示。
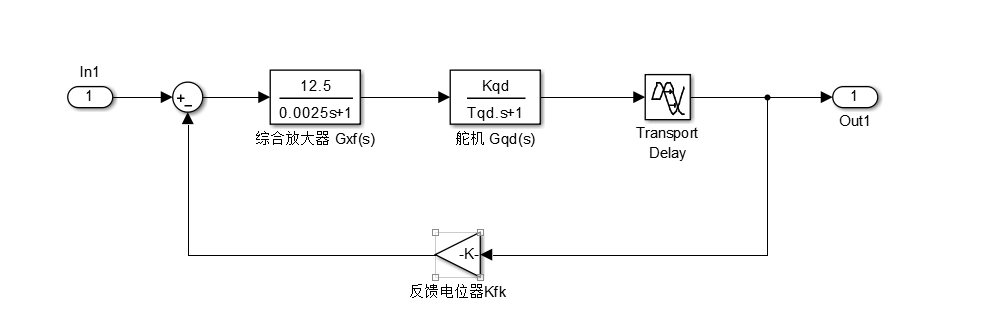
图1-2: ;
;  ; Kqd=0.24.
; Kqd=0.24.
式中,Gqd(s)是飞行状态函数;Kqd和Tqd为气动参数,其意义及在各特征点的取值见表1.1。
2.阻尼回路如图2-1所示。

图2-1

 ;C2=2, Kd=0.8
;C2=2, Kd=0.8
式中,Gd1(s)为飞行状态函数,气动参数Ki,Km,Tm和zetam的意义及在各特征点的取值见表1.1。
3.加速度回路如图3-1所示
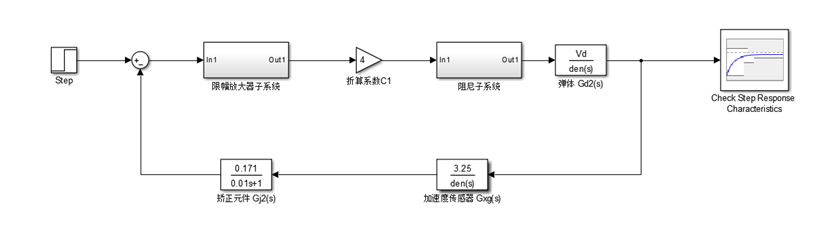
图3-1

 ;
; , C1=4 , g=9.8式中,Gd2(s)是飞行状态函数,g为地球重力加速度(该值随大范围位置变化),气动参数Vd和Td的意义及在各特征点的取值见表1.1
, C1=4 , g=9.8式中,Gd2(s)是飞行状态函数,g为地球重力加速度(该值随大范围位置变化),气动参数Vd和Td的意义及在各特征点的取值见表1.1
表1.1
参数 | 意义 | 各特征点值 | |||
Ⅰ | Ⅱ | Ⅲ | Ⅳ | ||
Kqd/(mm/mA) | 舵机传递系数 | 10.8990 | 3.0500 | 4.2910 | 5.5630 |
Tqd/(s) | 舵机时间常数 | 0.5850 | 0.2150 | 0.3120 | 0.3570 |
Vd/(m/s) | 飞行速度 | 193.9000 | 174.7000 | 208.1000 | 293.8000 |
Km/(1/s) | 弹体纵向传递系数 | 0.1215 | 0.2853 | 0.3886 | 0.2633 |
Tm/(s) | 纵向时间常数 | 0.3001 | 0.1943 | 0.1590 | 0.1602 |
Zetam | 弹体纵向阻尼比 | 0.0645 | 0.1012 | 0.1106 | 0.1010 |
Td/(s) | 弹体纵向气动时间常数 | 5.2692 | 2.0476 | 1.6024 | 2.2114 |
Ki | 传动变比传递系数 | 1.0000 | 0.9422 | 0.6066 | 0.5080 |
二.飞行器控制系统综合与参数优化设计的内容
已知,通过性能分析和静态设计,确定出阻尼回路矫正装置传递函数的形式为:

式中, Tj,Tj1,Tj2分别为传递系数,阻尼比和时间常数;kj=0.113。假设该飞行控制系统要求以特征点Ⅲ为基准,对矫正装置参数进行优化设计。也就是应用Matlab的SRO软件包,确定使系统单位阶跃响应满足相应稳态性能指标的矫正装置参数zetaj,Tj,Tj1和Tj2的合适取值。给定所求参数初始值为:zetaj=0.5,Tj=1.0,Tj1=0.1,Tj2=2.0
1矫正装置参数优化设计
1-1构建Simulink模型
根据图1-1~图3-1及图中各环节,装置的传递函数,构建出飞行器控制系统的Simulink模型,如下图:
分别建立5个M脚本文件并确保它们被保存在同一个文件夹下,以保证参数加载在同一个工作空间。这些文件的文件名及文件内容如下:
e7_4_0.m:zetaj=0.5;Tj=1;Tj1=0;Tj2=2(矫正装置参数初始值)
e7_4_1.m:Tqd=0.585;Km=0.1215;Tm=0.3001;zetam=0.0645;
Vd=193.9;Td=5.2692;Ki=1;Kqd=10.899(第Ⅰ特征点气动参数)
e7_4_2.m:Tqd=0.215;Km=0.2853;Tm=0.1943;zetam=0.0645;
Vd=174.7;Td=2.0476;Ki=0.9422;Kqd=3.05(第Ⅱ特征点气动参数)
e7_4_3.m:Tqd=0.312;Km=0.3886;Tm=0.159;zetam=0.1106;
Vd=208.1;Td=1.6024;Ki=0.6066;Kqd=4.291(第Ⅲ特征点气动参数)
e7_4_4.m:Tqd=0.357;Km=0.2633;Tm=0.1602;zetam=0.101;
Vd=293.8;Td=2.2114;Ki=0.508;Kqd=5.563(第Ⅳ特征点气动参数)
1-3矫正装置参数优化设计
首先运行e7_4_3.m程序,即在Matlab命令窗口中输入:
>>e7_4_3 ;>>e7_4_0 。此后就可以进行矫正装置的参数优化。系统动态性能指标期望响应设置如下:tr≤0.25s,ts≤0.5s,σ%=20%,误差范围±5%,rise=94%。经过参数优化的zetaj,Tj,Tj1,Tj2新值分别为:zetaj=1.1904 ,Tj=1.9346 ,Tj1=0.5475 ,Tj2=3.3151 ;并将其优化参数保存在M脚本文件e7_4_opt.m中。参数优化过程阶跃响应有图1-3.3

图1-3.3
2.系统时域性能分析:求各特征点的单位阶跃响应
将系统的Simulink模型(即图1-1(a))稍加修改得到图2-1.1并命名为exm7_4step.slx,由新模型可以求各特征点的单位阶跃响应。图中,两个To Workspace模块将单位阶跃响应y及时间t保存到Matlab工作空间。可以用y1,y2,y3,y4四个数组分别保存对应的时间数据。新模型exm7_4step.slx如图2-1.1所示。
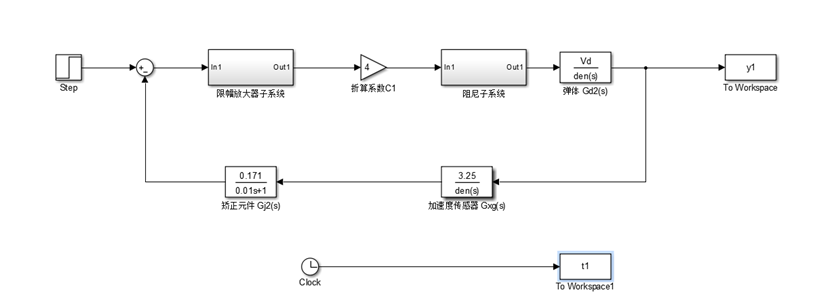
图2-1.1
下面以特征点Ⅰ为例,介绍求取单位阶跃响应的方法。在Matlab命令窗口中输入程序:>>e7_4_1; >>e7_4_opt
再将图2-1.1模型中的To Workspace1模块的变量名改为y1,将To Workspace2模块的变量名设置为t1,如图2-1.1。运行仿真模型exm7_4_step.slx,则在Matlab工作空间中会生成变量t1与y1。如果在命令窗口输入程序:>>plot(t1,y1,‘:’)
将会生成关于t1与y1的图形。按照2上述方法可以求出特征点Ⅱ,Ⅲ,Ⅳ的单位阶跃响应t2,y2;t3,y3;t4,y4,并据此绘制四个特征点的单位阶跃响应曲线。在命令窗口输入如下程序:
>>hold on;>>plot(t1,y1,‘:’) >>plot(t2,y2,‘-.’)
>>plot(t3,y3,‘-’) >>plot(t4,y4,‘--’)
运行后可得到各特征点的单位阶跃响应曲线如图2-2.1。

图2-2.1
根据图2-2.1,可近似求出表征系统时域性能的各项时域性能指标,如表2-2.2所示。
表2-2.2
性能指标 | 说明 | 特征点 | |||
Ⅰ | Ⅱ | Ⅲ | Ⅳ | ||
上升时间tr/(s) | 响应由零第一次到达稳态值的时间 | 0.63 | 0.42 | 0.28 | 0.26 |
峰值时间tp/(s) | 响应第一次达到峰值的时间 | 1.00 | 0.62 | 0.37 | 0.38 |
调节时间ts/(s) | 误差范围为±5% | 2.70 | 1.70 | 1.60 | 1.50 |
超调量σ% | (峰值-稳态值)/稳态值*100% | 13.52 | 6.10 | 7.20 | 13.32 |
由表知,特征点Ⅲ的各项性能指标均满足设计要求,其余三个特征点也基本满足控制要求。由表还可知,在四个特征点上,系统上升时间和峰值时间均小于1s,且调节时间小于3s,超调量均小于20%,表明此系统具有很快的响应速度和较短的过渡过程且过渡过程比较平缓。
通过以上对飞行控制系统的参数优化设计,时域性能分析和频域性能分析可见,我们可以利用Matlab中SRO模块和Simulink建立系统模型。再通过参数优化,我们可以得到满足控制系统性能要求的最优参数值。利用Matlab仿真非常方便有效。
参考文献:胡寿松.《自动控制原理》第六版 科学出版社
刘坤主编.刘翠响,李妍编著. 《MATLAB自动控制原理习题精解》
个人简介:覃洋建,1998年11月,男,汉,四川省南充人,本科学历,学生,专业:电气工程及其自动化。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



