国网四川省电力公司甘孜供电公司 四川 甘孜 626000
摘要:随着信息和通信技术的迅速发展,20世纪90年代初我国建立了分布式自动化变电站系统,如今“无人化”变电智能技术在国内和国外都已实行,基于此,本文研究220kV变电站中“无人化”变电智能技术的应用,讨论技术的应用目标,对技术的应用做出相应的规划,并深入探索规划方案的有效实施,以促进发电、配电、用电、调度的顺利完成。
关键词:智能技术;视频监控;通信服务器
引言:智能变电站是在数字变电站的基础上发展起来的,经过多年的技术革新,已经比较成熟。智能变电站满足大规模扩展的条件,主要由设备和系统层组成,是先进、可靠、一体化和对环境无害的供电设施,在220kV变电站中应用“无人化”变电智能技术,自动实现信息收集、信息分析、监测控制、设备保护和功能检测等核心功能,在网络通信平台的支持下,成功建设标准化的信息交流形式。
220kV变电站中“无人化”变电智能技术的应用目标
应用“无人化”变电技术的目标是实现整个变电站网络的智能运行,通过建立综合控制平台,实现对检查活动的一体化管控。未来还将促进智能化设备与物网互联技术的结合,实现安全系统智能检查。在没有工作人员的情况下使用智能转换技术,实现变电的自动化,提高设备维修的效率。一个基于智能平台系统的程序能做到远程维修设备,这个过程不需要工作人员进入操作空间,提升操作和控制的能力等级水平。建设监测中心,应用程序平台能对变电站进行完全智能的测试,实现跟踪监测,通过强有力的数据处理功能,完成数据分析,从而辅助决策,顺利分离运营和检测。
二、220kV变电站中“无人化”变电智能技术的应用规划
(一)适当的硬件设施和软件环境
关于变电站基础设施的规划,应该确保有一个能够容纳海量信息的信息系统,还应有适当的硬件设施和软件环境。建设若干安全区,方便向驾驶舱、调度站和数据中心发出控制令。设置监测服务器、运营状态监测站、评估中心服务器,数据采集服务器。就状态监测而言,要能够实现对主要的视频、机器人和网站进行监测,以建立评估系统。硬件设施包括智能巡检机器人,能提高非活动性智能检查子系统的性能水平,主要功能是温度测量、检查计量表、检查刀闸制动情况。
(二)以三级结构模型为基础
应用规划以三级结构模型为基础,即由智能检查机器人组成的检查系统、一个端站视频监控系统、部署在“无人化”变电站控制室的台站数据采集平台。控制中心的智能检查平台可以远程监测机器人和无人机的状态,具有强大的视频编辑、图像导航和分析能力。无线网络覆盖变电站,确保智能检查机器人能够不受阻碍地进行通信,与控制室的光纤无限制地连接。就智能检查系统的互联系统而言,有必要确保与综合自动变电站控制系统实现完全一体化,与序列控制、自动监测系统、消防安全系统相协调,与4A系统连接。三级结构模型能够在机器人、无人机或空间站监测组出现异常情况时进行测试,并查明原因,方便维修。
(三)开发操作程序平台
关于操作程序平台的开发,需实现交互式数据系统与主站SADA系统的互动,能正确处理图像信息。如图1所示,系统的操作平台结构将遥测、通信和在线监测综合起来,显示设备运行状况信息,并对设备进行编程控制。电子设备将通过应用数据模型算法来控制变电站现场的设备,具备远程自动退出功能。所建立的多层面数据综合平台,是对监测和评价系统的综合规划,并支持重要的决策和深入的数据分析,能有效加强应用程序的功能。能实现状态评估、差距显示、在线监测等功能,拓展功能充分支持监测预警、技术维护、远程遥控、问题分析。
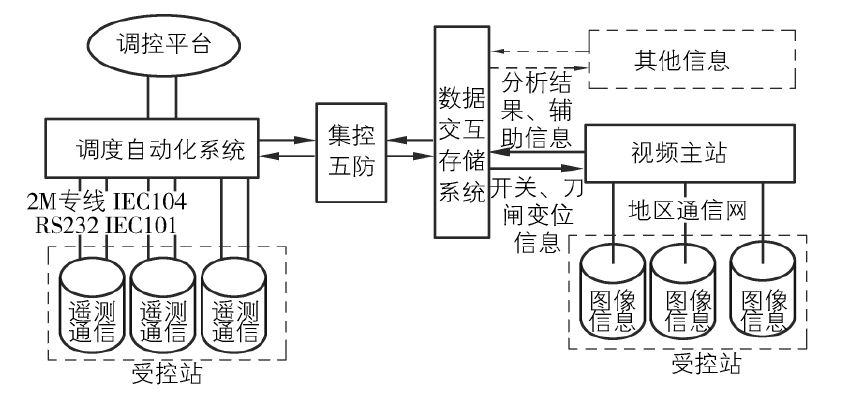
图 1 操作平台的整体结构
三、220kV变电站中“无人化”变电智能技术的应用实施
(一)实施联动
以变电站视察机器人为基础的视频链路和监测系统,主要包括互联分析主机、数据储存服务器、与外部系统互动的服务器、视察机器人等,这些系统的主要功能是对现场进行视察。联动系统中海油处理中央互联分析和检查计算机的机器人通信单元,固定的级联分析主机连接到数据存储器、通信服务器,无线通信模块与联动分析主机和扫描机器人相连接,通信服务器负责进行连接控制,并将异常情况发送到外部系统,还负责接收外部系统的连接请求,并将这些请求传送给互联分析主机,以便进行连接,相应的服务器完成通信是通过网络进行的[1]。异常情况包括异常对象闯入、火灾、设备的热性能有问题、设备运行状态异常。外部系统包括:安全、防火、全球定位系统和综合信息平台。另外无线通信模块用于连接分析控制系统和机器人。在功能应用方面,机器人、无人机和视频监测系统取代了人工检查,能正确判断设备的缺陷和大幅度提高设备监测的覆盖率。系统之间的连接是通过编写程序实现的,大多数的数据应用程序,采用物理连接和智能装置,特别是机器人和辅助控制系统以及现场电力之间的综合连接,大大提高了情报水平。
(二)视察机器人检查不明物体
机器人完成充电,离开充电室,进入到工作场所,开始视察,按照预先确定的视察路线对整个变电站进行日常视察。视察机器人通过一个无线通信模块将视察录像实时传送到中央网络分析计算机,该计算机将实时分析是否有不明物体进入变电站区域。分析主机提示有移动物体进入,就会控制机器人的运动实现对不明物体的跟踪,同时发出指示,根据物体位置启动固定点监测子系统,当辅助固定点监测子系统接到命令和关于物体位置的信息时,就会触发安防系统。在目标附近的固定点监分析主机根据与安全系统的预先协议,发出请求,安全和安保系统收到联合行动请求,并执行一系列联络任务内部安全和监视系统,引发声响警报。在处置移动物体之后,视察机器人返回其原来的路线,继续进行监测,在发现移动物体时重复上述措施,直到完成对检查路线所有地区的巡逻。中间有电量不足时,就会回到充电室补充电量。
(三)通过视察机器人发现火情
当视频监测系统与消防系统相连接时,视察机器人在电量充足的情况下才会执行任务,离开充电室,开始视察,沿着事先预设的路线巡检变电站的所有区域。视察机器人通过无线通信模块将视察录像实时传送到中央计算机上,以便进行连接分析,这其中包含了可见光的分析工作。如果有明火,且红外自动调温器热成像数据的温度超过火警警报的温度限值,那么联动分析装置就会做出该区域已经起火的判断,并明确起火点的位置,控制着视察机器人的移动,做出连续跟踪指示,同时发送指令将物体位置传送给辅助点监测子系统[2]。当固定点辅助监测子系统接收到命令,获得关于物体位置的信息,会立即进行监视,并在安全地点附近寻找固定的监视摄像机。联动分析主机通过应用程序服务器向消防系统发送通讯连接请求,消防系统收到了连接请求,在系统内发出声音警报,通知维修人员,进行消防救助,待火情消除后,视察机器人将返回原巡逻路线,并继续视察工作,当再次出现火灾点时,会继续执行上述过程,直至对变电站的所有地区完成视察为止。
结束语:综上所述,220kV变电站中“无人化”变电智能技术的应用目标是实现变电的自动化,提高设备维修的效率。为实现这一目标需保证有适当的硬件设施和软件环境,以三级结构模型为基础,开发操作程序平台,实施联动,通过视察机器人检查不明物体、发现火情。
参考文献:
[1]赵昂,王洪涛,赵军,等.智能变电站二次回路三维建模及全景可视化研究[J].电气技术,2020,21(12):49-55.
[2]姜美玲.“无人化”变电智能技术在220kV变电站中的应用[J].自动化应用,2020(07):120-121+124.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



