中国民用航空华东地区空中交通管理局江西分局 江西南昌 330114
【摘要】我国对空管自动化系统的需求是必不可少的。然而监视数据融合的处理是整个空中交通管制自动化系统的重要基础,实现ADS-B与多雷达的有效融合是保障民航安全性必不可少的技术。本文先分析雷达与ADS-B的区别,然后逐步分析空管自动化系统中多雷达与ADS-B数据融合的方法。
【关键词】ADS-B 雷达数据融合
1 引言
空管交通管制自动化系统的任务是有效管理和监督控制航空器的空中活动,防止航空器飞行期间发生碰撞,确保飞行安全并有效提高飞行效率。国际民航组织提出新航行系统的概念,在现有多雷达联网的基础上应用ADS-B技术[1],通过多部雷达的结合实现对空域的高精度监控,可以保证对飞行器连续和不间断的的可靠监视,还可以确定密集空域的具体监视参数,从而实现对空中交通的有效管理。因此多雷达与ADS-B数据融合技术已经被越来越多的空管自动化系统所广泛应用。
2 ADS-B与二次雷达的基本概述
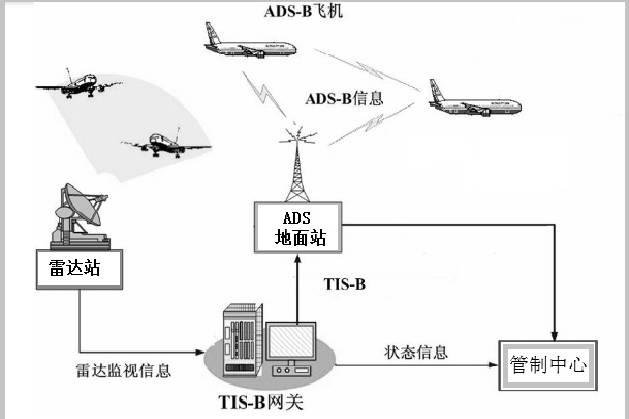
ADS-B设备通过GPS确定其位置,然后以快速的时间间隔通过发射机将自己的位置、身份、高度、速度和其他数据报告给外部。专用的ADS-B地面站,能够接收传输的24位飞机地址码(全球唯一机体代码)、经纬度位置、飞行识别信息和其他数据,并将其转发给空中交通管制员用于准确追踪该飞机。下图是ADS-B的工作原理图:
直至今日,管制员一直依赖于通过SSR来确定飞机的身份及飞行高度。但是对于新航行系统,应用于空中交通管制自动化系统的监视技术主要是雷达联网和ADS-B。其中,雷达目前主要以二次雷达为主。为了方便雷达与ADS-B数据的融合,下图在多个方面对二次雷达与ADS-B进行了比较:
| 二次雷达 | ADS-B |
参考坐标系 | 极坐标 | WGS-84坐标系 |
更新率 | 4-10s | 1s |
定位方式 | A/C询问模式、S模式 | 依赖GPS确定精确位置 |
精度 | 200海里:388米 60海里:116米 18海里:35米 | 比雷达更实时精准 |
识别码 | 动态分配,有重码概率 | 每架飞机有唯一标识码 |
地面设备 | 投入和维修成本高 | 投入成本为二次雷达的十分之一,寿命时间长 |
但是ADS-B也有其瓶颈之处,由于ADS-B依靠GPS来监视飞行设备,所以ADS-B无法验证所接收信息的有效性和真实性,如果GPS失效,那么ADS-B将会无法正常工作。因此将ADS-B和多雷达数据融合成为空中交通管制自动化系统的基础和关键技术。
3 ADS-B和多雷达组网的数据融合
实现多雷达与ADS-B的数据融合是有大前提的,每部雷达和ADS-B是彼此独立工作的,不同的雷达的分布不同,导致许多参数的不同,没有统一的时空参考点和参考坐标系。多雷达与ADS-B的主要任务是将各自的观测数据传送到1个处理中心,经过数据融合建立清晰的综合航迹,因此有必要考虑解决多雷达和ADS-B的时空一致性,以减少后续数据融合的误差。
3.1 坐标变换
雷达使用球面极坐标表示,不同的雷达根据其各自雷达头所在的位置定位坐标原点,而ADS-B航迹位置是WGS-84坐标系,为了将这些雷达数据转换为以信息处理中心[2]为原点的坐标系中,一种更准确的转换方法是先建立地心坐标系,然后将单个雷达航迹转换成地心坐标系位置,再变换成为数据融合为中心的直角坐标系位置,这样可以让数据融合的过程更加精确,保证数据更加精准。
3.2时间对齐
每部雷达脉冲重复周期和天线转速不同,导致不同雷达站的观测数据不在同一时刻,并且雷达观测数据更新周期与ADS-B报告的周期不同,有必要将不同时间测量的航迹统一到同一时刻。由于ADS-B传输的数据中,速度和位置信息参数是由GPS提供的,全球定位系统所给出的信息参数一般要比传统的雷达所测的数据精度更加准确,这个数据参数在ADS-B和SSR融合算法中可以发挥很大的作用,因此首先将各雷达站和信息处理中心使用GPS时间系数;其次,根据GPS时间轴对收集到的信息进行排序;最后,将1个处理周期内的航迹统一到1个系统周期时间。
3.3误差校准
误差来自于雷达设备和ADS-B设备本身的测量精度,可以通过加权平均算法估计系统误差以获得每个雷达的系统误差,最后将测量得到的数据进行统一配准。
3.4 ADS-B数据与雷达数据相关
为了更好的构建出一个数据融合系统,仍然需要使用分布式多传感器来分析和跟踪航迹,从而判断多雷达下的所有单雷达是否都在同一时间段监测同一目标,然后将得到的数据进行有效整合,站点类型并不是包含所有的,需要对其进行区分,主要包含如下站点目标:(1)目标位置存在关联;(2)二次代码或者24位地址码之间存在相关性,并且存在唯一且等效的二次代码;(3)目标高度之间存在相关性;(4)目标速度存在着一定的相关性。有效促进雷达数据和ADS-B数据实现合并,其合并原理相似,不同之处在于ADS-B中的24位地址码相关性更强。[3]
3.5 航迹融合
对于来自于SSR还有ADS-B的数据处理我们一般采用加权平均算法,也就是最小二乘估计算法,该算法可以根据局部的航迹分配飞行航迹的权值,并排除了质量较差的一部分航迹,然后航迹根据自身的权重比和系统相关联进行更替处理。当然,如果所占的权重比越高,那就代表该轨迹的数据质量也就越高
因为多雷达与ADS-B能够有效的进行数据融合,构成最后的数据融合系统,所以它可以提供非常精准的航迹精度,当系统生成航迹时,多传感器数据融合模块将与飞行计划和系统的轨迹紧密相关。
4结语
目前中国民航总局在大力推广建设ADS-B系统,因为这套系统对空中交通管制的监测具有跨时代的意义。ADS-B不仅可以有效适应我国民航运输业的当前发展:飞行运输量增长速度块,总运输量持续增长的情况,而且可以弥补当前雷达监管系统的缺失和不足,可以提供更准确的位置精度,并且提高飞机的协同避撞能力,可以为飞机的飞行提供更安全的飞行计划和飞行任务环境。积极实现ADS-B与空管监视雷达的良好融合,需要注重结合这两种监视方式的特点,采用数据融合系统建设的方式,充分提升融合效果。[4]
6 【参考文献】
[1]孙沂吴仁彪,空管自动化系统的多雷达和ads-b数据融合技术综述.《第二十五届中国(天津)2011’IT、网络、信息技术、电子、仪器仪表创新学术会议论文集》
[2]高扬雷昱雒旭峰,基于ADS-B的多雷达民航空管安全监视体系.交通信息与安全,2009:03.
[3]雍元红,多雷达与ADS-B数据融合的关键技术[J].空中交通,2015:28-30.
[4]张文菁,ADS-B与空管监视雷达的融合处理方式综述.科技创新与应用,2019:05.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



