华北电力大学 ( 保定 ) 国际教育学院 河北省保定市 071003
摘要:本文介绍了仿人机器人的特点以及当前国内外仿人机器人的发展状况,并以一种双足竞走型机器人为例,详细介绍了仿人机器人的硬件设备与机械结构组成设计。
关键词: 仿人机器人;双足机器人;步态规划;
随着机器人相关产业的迅猛发展,在现代生产娱乐生活中,机器人的应用范围不断扩大,机器人的种类也日渐变多。依据不同的分类标准,可以对机器人进行不同的分类,例如,依据功能可以分为机械操作、位置移动、信息传递、人机交互机器人,按照用途则可分为工业、农业、服务业、军用机器人四大类。
仿人机器人是一种具有与人类似的结构,并可以模仿人体的物理特性、感知特性及社交特性并能像人一样学习,记忆,积累经验的机器人,在外貌形状和生物功能上,有着与其他类型的非仿人机器人不同的特征,具体表现在于:
(1)仿人机器人的活动方式不同于传统的机械化装置,具有多样性、普适性和抗折损性。 仿人机器人拥有类似于人类双手的两条具有一定自由度机械手臂,并在手臂的后端保留了手指的相关结构,常见的为双指,还有完全仿人的五指结构。这样的结构使得机器人可以执行类人的机械物理活动,而且因为机器人身体自由度数量以及角度较之于人类来说更高,仿人机器人能够执行比人类活动更复杂的机械运动。
(2)智能机器人需要与外界进行自主交互,常用的机器人自主交互的方式有触觉,听觉,视觉等。 直到目前为止,仿人机器人的研究主要为手眼交互系统和自主移动车以及激光测距的结合, 但因为其各自机械性结构的局限性,限制了机器人在运动中的与外界的交互行为,从而阻碍了研究,相反,仿人机器人因为类人的结构,具有更加灵活的行动能力,能够为机器人行业带来突破。
机器人的发展较早出现在美国,且发展较快。多年以来,日韩两国基本上引领了各大机器人领域以及机器人相关学术方面的发展方向,并且主要运用在军工产业、制造业。相比于美国以及日韩两国等国外发达国家来说中国的机器人才相关产业。起步时间较晚,但发展速度很快。目前的国内服务机器人市场,家用生活服务型、医疗医护服务型和公共秩序服务型机器人的市场占比较高。在中国制造2025中,我们明确提出到2025年,工业机器人销售量达到26万台以上,国内工业机器人保有量将达到150万台以上,国内机器人市场将达到500亿以上,发展空间巨大。
仿人机器人相对于功能限制较大的工业机器人来说,更注重对人类的模仿以及与人工智能相结合的机器人运动逻辑,往往通过大量传感器与控制器的交互对实际环境进行应变,并依靠与多个舵机带来的多自由度做出复杂的动作。随着机器人技术升级,现在的仿人机器人可完成轨迹巡线﹑跳舞、搬运、语言交互等功能。目前还有类肤质触觉传感器的研发进程,能够给我们带来更加强大的仿人模仿技术。
目前工业机器人相关产业已经较为成熟,广泛应用于各大产业中,而仿人机器人则更多地出现在高校已经机器研究所,例如本文所涉及的双足仿人机器人。机器人的设计与调试涉及到多个学科且要掌握多种能力,例如制图﹑电子元件的焊接组装﹑3D打印﹑激光切割以及32单片机编程等。可以大大提高大学生的创造力与动手能力以及综合素质。
本文以一种双足竞走型机器人为例探讨仿人机器人的结构设计,机器人共由结构体、CCD传感器、CM-530控制器、基于STM32单片机的CCD采集板,舵机控制板和电池等五部分组成。
采用RoboPlus软件设计机器人动作,调试出多个能够稳定行走的动作组,并在实际场景根据情况随机应变。
CCD传感器和采集板采集赛道灰度的AD值,传递给控制器,控制器和舵机控制板处理后得出需要做出的动作,控制舵机转动做出对应动作。
机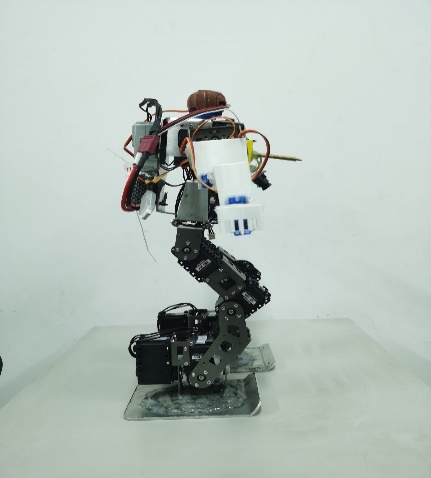 器人采用低密度高硬度稳定性高的类人结构件,以舵机模仿人体关节,减少机器人自重的同时提高稳定性,整体连接组成仿人,将CCD采集板安装在肩部,将CM-530控制器安装在后背上方,将电池安装在控制器下方,使机器人重心基本可以稳定在双脚底板之间。
器人采用低密度高硬度稳定性高的类人结构件,以舵机模仿人体关节,减少机器人自重的同时提高稳定性,整体连接组成仿人,将CCD采集板安装在肩部,将CM-530控制器安装在后背上方,将电池安装在控制器下方,使机器人重心基本可以稳定在双脚底板之间。
手臂设计:需要具有能够具有与自由度对应的可以安装舵机的位置,并在此基础上保证机器人的对称性,稳定性,协调性。
躯干设计:躯干应该足够大并且稳定,并流出空隙以方便舵机引线通过,且能够放置控制器和电池。并且能够合理连接头部、手臂与双腿。
腿部设计:应保证机器人正常站立和运动的重心稳定性。
机器人采用钢片制作部分部件,重量比较大,因此舵机必须产生较大的扭矩,才能达到标准的动作。否则,极有可能因为舵机的性能参数等因素,导致机器人的姿态动作出现不协调的问题。另一方面,机器人在行进过程中,舵机在高速运转,会产生大量的热量,因此舵机的散热性能必须优良,才可以保证舵机不会因为温度问题而被烧坏。我们装备AX-18系列舵机,这个舵机主要的组成部分是一个直流电机、齿轮减速器和一个具有通讯功能的控制芯片。工作时能会产生较大的扭矩,其材料坚固,能承受极大地外力。
机器人的控制器使用了CM-530控制器,CM-530是机器人Bioloid的新一代主控制器。此控制器包含TTL通讯板,CPU,输入按钮,状态LED灯,GP I/O端口,它可以兼容AX和MX系列舵机,支持蓝牙和Zigbee通讯模块,还可通过PC和USB连接通讯,可满足机器人体系的正常平稳运行。
机器人采用线性CCD电耦合元件, CCD传感器器件把光学信号转换为模拟电流信号,通过放大和模数转换,实现图像的获取、存储、传输、处理和复现等功能。
为使得机器人能够更加稳定的进行动作,同时能够更精准的判断位置,就需要稳定的供电方式,电池选用正常电压在11.1V以上,这样保证能为机器人运行提供合适电压,大大减小了机器人自身负重,提高了仿人机器人速度。
采用alientekministm32单片机作为主控芯片,该单片机包含有128K FLASH、20K SRAM、2个SPI、3个串口、1个USB、1个CAN、2个12位的ADC、RTC、51个可用IO脚,其运行时钟频率可达80MHz,可以满足系统的正常运行时数据的处理工作。
参考文献
[1]胡艳凯.仿人型机器人结构综述[J].南方农机,2020,51(17):65-67.
[2]马阳.工业机器人在我国的应用现状和发展趋势分析[J].南方农机,2020,51(17):194-196.
[3]桂圆圆,翟俊萌.工业机器人发展现状与发展趋势[J].科技风,2020(21):11.
[4]张远. 仿人机器人模仿学习中运动姿态平衡控制的研究[D].北京工业大学,2018.
[5]林俊武,周雨成,伍坪,郑剑锋.一种简易仿人类行为机器人的设计[J].榆林学院学报,2020,30(04):17-20.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



