中国飞行试验研究院
摘要:无人机作为新时代社会经济和城市建设发展的全新技术领域,在各行业当中应用都取得了显著成绩。但随着科技水平的持续上升,无人机控制技术也提出了更高要求,因此本文在了解目前无人机控制技术发展情况的基础上,明确自适应控制技术内容,并结合实践案例分析如何在现今无人机控制方面应用自适应控制技术。
关键词:自适应;控制技术;无人机;四旋翼无人机;神经网络
1.目前无人机控制技术发展趋势
目前无人机的控制方式分为两种,一种属于人工控制,需要飞机操纵员在地面控制站管控无人机;另一种属于自主控制,可以利用机载计算机、通信链等保障无人机的运行安全。从本质上讲,无人机的自主控制就是自动控制的高级发展阶段,其属于智能控制,实际研究和应用会涉及到信息论、人工智能及计算机科学等[1]。一方面,自动控制可以对无人机进行过程闭环动态反馈管理,确保系统的动力学和运动学都能达到预期标准;另一方面,充分利用人工智能,能保障无人机系统中具备记忆学习、优化决策及形式语言等功能。两者作为现今无人机技术领域研究的重难点,面对实际操控和管理要求越发严格的无人机设备,未来行业发展必然会讲目光集中到自动控制技术上,并会加强相关专业人才的培养力度,以期在优化无人机技术领域的同时,提高实际操控技术水平。
2.自适应控制技术
最早应用自适应技术的是航空领域,原因在于飞机的动力学会受内外条件的影响,随着所处环境的不同,或是结构参数出现变化,具体动力学也会产生改变。由此可知,为了让飞机的高度和速度都控制在规定范围内,只沿用传统控制理论是难以实现的,为此美国麻省理工的教授Whitaker提出要设计自适应控制的相关模型方案,最终经过实验验证和调整后发现,在飞机正常状态下,这一模型达到可以预期性能要求[2]。因此,在网络技术和控制理论全面推广的背景下,随着实验探究越发深入,两者不仅在各行业发展中展现出了独特作用,而且实际应用范围还在不断拓展。尤其是对无人机技术领域而言,在无人机控制当面应用自适应控制技术,既能让某一指标达到最优化,又能解决以往飞机运行控制难题。需要注意的是,自适应控制技术相比传统反馈控制更加繁琐,不管是研究内容还是所需成本都会随着技术水平的提高而增加,因此在常规反馈达不到要求的情况下,要想更好研究自适应控制技术,必须要从不同角度入手,注重在保障技术优势和成本的同时,为促进无人机控制发展提供有效依据。
3.案例介绍
为了更好验证自适应控制技术在无人机控制方面的应用优势,本文以四旋翼无人机为例,对其吊挂空运系统当中的自适应控制技术进行深入探讨。了解目前四旋翼无人机应用情况可知,其主要运用在影视、通讯及军用、警用等领域,具备垂直起降、灵活摆动等优势,而无人机吊挂空运系统作为其中的重要组成部分,包含了8个自由度和4个控制输入信号,相比普通且独立的无人机系统,不仅需要控制大量繁琐的问题,而且无法直接利用驱动器管控吊挂的负载,只能利用运动间接实施管控,这就要求系统在设计时必须要将加强整体的稳定性[3]。
本文研究的无人机吊挂空运系统结合了其在运行期间所受空气阻力,由于这一数值未知,构建相关模型也有不明确性,所以本次设计引用了基于能量耦合的非线性控制方案。这种方案既利用了神经网络和自适应参数实施评估,又引用了鲁棒控制算法补偿神经网络计算误差,在实践探究中展现出了以下优势:第一,本次设计并没有直接对系统的动力学模型实施线性化处理,相反利用控制器设计非线性相关模型;第二,由于动力学模型当中包含不明确的空气阻力,所以要选用鲁棒控制算法进行弥补,以此降低不明确数值对控制系统稳定的影响;第三,本次设计在进行多次试验验证的同时,提出了严谨的数学证明,能充分保障控制方案的有效性。
结合下图分析可知,其作为本文研究的吊挂空运系统结果图,其动 力学模型公式为,此次试验提出两种假设:第一,吊挂的负载一直都在无人机的下方,那么两者之间的摆角就会满足
力学模型公式为,此次试验提出两种假设:第一,吊挂的负载一直都在无人机的下方,那么两者之间的摆角就会满足 这一条件;第二,如果吊挂绳索一直都处于张紧状态下,而且长度不会发生变化。
这一条件;第二,如果吊挂绳索一直都处于张紧状态下,而且长度不会发生变化。
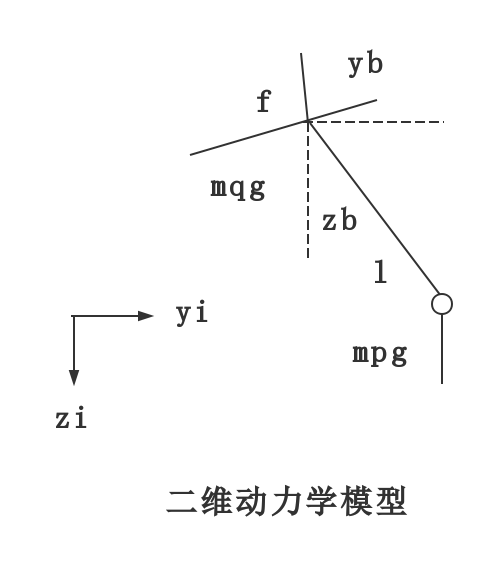
图 1 吊挂空运系统的结果图
根据上述条件,在试验操作中保障无人机所在的起始区域为y0=0m,z0=-1.7m,目标区域为yd=3m,zd=-1.7m,而神经网络隐含层的节点数量是10,输出层的权重初始数值为0,更新律的系数是0.02。通过对比线性二次调节器和非线性控制器之间的实验变化,其中前者的状态变量为 ,输出量为
,输出量为 ,输入量为
,输入量为 ,相应的空间表达公式为:
,相应的空间表达公式为:
利用MATLAB线性化工具获取它此时的空间矩阵如下所示:
再获取它的线性二次型最优指标函数为 ,通过校对验证最终得到它的权阵如下所示:
,通过校对验证最终得到它的权阵如下所示:
结合下表1数据分析可知,非线性状态下无人机的调节时间要比后者要小,而其他数据也明显低于LQR控制器,而且实际运行非线性控制器也具有极强的稳定性,能有效控制负载的摆动现象。因此,运用非线性控制器能充分展现自适应控制技术在无人机运行当中的独特优势。
表1两种数据对比分析
| 非线性 | LQR |
调节时间 | 5.419s | 9.838s |
稳态误差的平均数值 | 0.0097m/0.0199m/0.4652° | 0.0408m/0.0242m/1.0312° |
稳态误差的标准差值 | 0.0087m/0.0058m/0.5521° | 0.04m/0.0087m/1.2519° |
稳态出现的最大偏差 | 0.033m/0.029m/1.9481° | 0.116m/0.038m/2.8075° |
结语
综上所述,本文简单介绍了目前无人机控制技术发展情况,分析了自适应控制技术的内容和优势,并结合四旋翼无人机的吊挂空系统进行了深入探讨。从实践发展角度分析可知,其虽然展现出了良好的控制力,但整体设计和研究依旧存在很多漏洞。因此,需要科研人员在整合以往工作经验的基础上,继续加强自适应控制技术的探索与分析,并在后续研究中将目光集中到位置误差等方面,以期为无人机技术领域革新发展奠定基础保障。
参考文献
[1]王雪娆, 孙长银, 林晓波,等. 基于神经网络的无人机姿态自适应控制仿真[J]. 计算机仿真, 2020, v.37(03):42-46+93.
[2]厉彦一、王健、李志远. 适用于测绘四旋翼无人机的模糊PID控制算法及仿真[J]. 测绘通报, 2020(S1):6-10+17.
[3]陶杨. 浅谈无人机遥感测绘技术的应用[J]. 科学技术创新, 2020(7):183-184.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



