云南省地质工程勘察总公司,云南昆明 650051
摘要:倾斜摄影测量技术在获取地物正摄影像的同时也能获取真实的侧面纹理信息,为城市实景三维模型的建立提供了崭新的方法。本文通过对无人机遥感和倾斜摄影测量技术的介绍,同时结合某地区实景三维模型构建实例,对利用无人机倾斜摄影测量技术进行城市实景三维建模的整个流程进行了探讨,同时分析了三维模型的精度,研究结果表明,应用该方法生产的实景三维模型满足相关规范要求,应用优势明显。
关键词:倾斜摄影测量;三维;数字城市;真正射影像
1 引言
随着“数字城市”逐渐兴起,其最基础的数据载体,城市三维模型的构建技术也在不断飞速发展。经过多年来的探索,在众多技术中,摄影测量技术脱颖而出,其能大面积高效获取数据的能力使得快速城市三维建模成为可能,但传统摄影测量技术仅能获得正摄影像数据,缺乏侧面纹理,在此问题上,又逐渐发展出一项新的技术,即倾斜摄影测量技术,该技术区别于传统的摄影测量技术,它采用一个下视镜头,四个斜视镜头来获取航空影像,在获取正摄影像的同时也能获取真实的侧面纹理信息,为城市三维建模提供了一种新的思路。本文结合某城市实景三维建模生产实例,提出了一整套基于倾斜摄影测量技术的城市实景三维建模方法,同时对三维模型的精度进行了分析,希望给类似项目提供借鉴。
2无人机倾斜摄影测量技术
2.1 无人机遥感技术
无人机是通过无线电遥控设备或自动化程序进行操控的不载人飞行器,包括多旋翼、固定翼、飞艇、直升机等机种,其具有机动灵活、结构简单、使用成本低、快速响应等特点。无人机遥感是以无人机作为航空摄影平台,在快速获取空间遥感信息的同时,还能对遥感数据进行全自动化的处理、建模和应用分析,在当今测绘领域有着无可比拟的应用优势。
2.2倾斜摄影测量技术
倾斜摄影测量技术是通过将多镜头相机安装在同一个飞行平台上(如图1所示,一般为5镜头),从四个倾斜和一个竖直共五个方向同时获取地面物体的影像,其中和地面垂直的一组影像称为正片,与地面成一定角度的四组影像称为斜片。在拍摄相片时,同时记录飞行器的航速、航高、旁向和航向重叠等参数,在一个时间段内,飞行器可连续拍摄出多组影像重叠的像片,内业人员可以在三张像片上找到同一个地物,并且选择其中最清晰的一张像片进行纹理制作,这样就可以轻松地分析出建筑物的结构,所获影像再经过几何纠正、区域网联合平差、倾斜影像匹配、DSM点云生成、TIN构建、纹理映射等步骤处理,最终生成真实直观的实景三维模型。倾斜摄影测量的影像数据不但能反映地面物体的真实情况,而且还可以通过测量定位技术,将地理信息和属性信息嵌入到影像中,从而使用户获得全方位的体验,让遥感影像的应用范围得到极大地拓展。
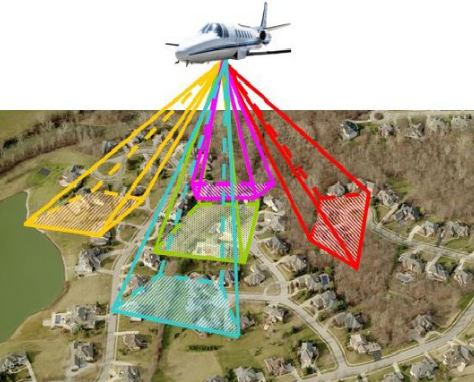
图1 目标区多角度航空拍摄示意图
2.3技术流程
倾斜摄影测量技术构建城市实景三维模型的技术流程见图2:
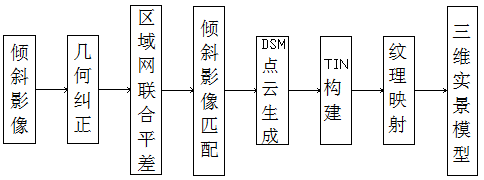
图2 技术流程图
3生产实例
3.1项目背景
根据数字城市建设规划,我队参与了某城市三维数字地图系统建设项目,该区域东西长约10.4km,南北长约9.2km,近似正方形范围,本项目共需要构建中心城区约100km2的多细节多层次的精细三维模型,在城市规划设计与管理审批、展示和宣传城市、数字旅游等多方面开展应用。
3.2倾斜影像获取
利用无人机对测区进行倾斜摄影,成图比例尺为1:2000,影像地面分辨率为0.06米,航摄高度为600米。采用专用航线设计软件进行航线设计,航向重叠为66%,旁向重叠为30%。相机采用SWDC-5航空倾斜摄影仪,定姿定位测量仪采用POS系统,实际飞行时,各个相机根据航线设计的对应曝光点坐标全自动进行曝光拍摄,采用1个垂直镜头、4个倾斜镜头, 共完成32条航线2947个曝光点位共计16382张真彩色影像图片及数据。
3.3倾斜影像加工
通过相应的倾斜影像数据处理软件,对采集到的倾斜影像进行处理,包括几何纠正、区域网联合平差、倾斜影像匹配等系列处理,最后将平差后的数据赋予每张倾斜影像,使得每张倾斜影像上的每个像素对应真实的地理坐标位置,以此实现倾斜影像的实时量测,从而形成符合应用需求的倾斜影像库。
3.4实景三维建模
本项目采用了Skyline PhotoMesh7.0软件进行三维建模,PhotoMesh7.0是一款倾斜摄影自动批量建模软件,可以实现快速地、自动地从一组标准的、无序的二维相片批量构建精细的、带有纹理的三维网格模型。PhotoMesh7.0产品基于高性能计算机图形学、计算机视觉、航空摄影测量等先进技术,可以融合不同来源、不同格式、不同分辨率的相片,自动完成DSM点云生成、TIN构建、纹理映射等流程从而生成实景三维模型。
3.5精度评定
为了评定倾斜摄影建模的精度,本项目外业阶段布设了10个检查点,均匀分布在测区范围内,利用GPS-RTK测量出每个点的坐标和高程,同时为了便于在三维模型上查找这些点位,外业测量时现场拍摄每个点对应的实地位置。将检查点的外业实测坐标作为真值,在三维模型上读取的坐标作为计算值,统计出计算值和真值之间的差值,从而得到三维模型的精度。
经统计可以得出,10个检查点中平面最大误差0.300m,中误差0.193m;高程最大误差0.216m,中误差0.136m,其精度满足CH/T 9015-2012《三维地理信息模型数据产品规范》的要求。
4结束语
与传统三维建模方法相比,无人机倾斜摄影测量技术在高清晰度像片自动匹配建模技术上,改变了常规模式带来的许多弊端,实现了快速、自动并一体化的构建城市三维模型,大大降低了建模的成本,生产效率显著提高,应用优势明显。该方法适合大范围三维模型的构建。通过应用,我们发现在树林或高大建筑物集中地区,无人机倾斜摄影容易受到遮挡,这时再通过常规技术手段来补充信息,相信随着技术的不断进步,这一不足之处一定会有更好的方法来解决。
参考文献:
[1]李安福,曾政祥,吴晓明.浅析国内倾斜摄影技术的发展[J].测绘与空间地理信息,2014,(9):57-59,62.
[2]沈昌兵.倾斜摄影测量在城市数字化三维建模及更新中的应用研究[J].测绘与空间地理信息,2020, 43(7):176-180,183.
[3]余忠迪,李辉,巴芳等.基于消费者级无人机的城市三维建模[J].国土资源遥感,2018, 30(2):67-72.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



