昆山市水利测绘有限公司, 江苏昆山 215300
摘要:介绍了无人船测量系统的工作原理和作业流程,并以某河道水下地形测量项目为例,对利用无人船测量系统进行水下地形测量的工作过程进行了阐述,同时通过布置检查线对测量精度进行了检查,进一步验证了无人船测量系统具有吃水浅、作业灵活、可扩展、智能化、效率高等特点,其在河道水下地形测量中具有明显的技术优势。
关键词:无人船测量系统;河道;水下地形测量;精度
1引言
水下地形测量包括定位和测深两部分,可为河道疏浚、水库清淤、抗洪抢险、安全搜救等工程提供基础数据。GNSS RTK与单波束测深仪组合是当前主流的水下地形测量技术,采用的观测平台通常为载人船舶和橡皮艇等,载人船在大范围水域测量发挥出高效的优势,但遇到浅水、浅滩区域由于难以靠近岸边会存在作业空白区,特别是在水流湍急的水域还会影响到测量人员的生命安全。无人测量船系统是新一代智能化综合作业平台,它可搭载多种水文和测绘传感器,相对于传统载人船只,具有投放迅速、运输方便等优势,自动避障的功能还可确保船只和人员的安全,适合于近海、海湾、河道、水库、码头等多种水域联合作业,较好的解决了浅滩和危险水域的作业难题,大大提高了水下地形测量的机动性和工作效率。
2 无人船测量系统原理
无人船测量系统根据搭载测深仪的不同分为单波束无人船测量系统和多波束无人船测量系统。单波束测深仪体积较小,构造简单,一次发射单个波束,适合内陆河道、水库。多波束测深仪结复杂,效率高,价格昂贵,主要用在海洋科学研究、海洋工程建设、资源调查与开发等领域,常见的无人船测量系统均搭载的单波速测深仪。无人船测量系统的工作原理也很简单,主要是依靠GNSS 进行高精度定位,利用搭载的测深仪实现同步测深,再通过发射天线把定位和测深数据实时传输到工作岸基中,利用一定的转换公式得到测深点的坐标和水底高程。简要的原理示意图如图1所示。
图1 无人船测量系统原理
图1 中,O1、O2、O3 分别为GNSS 接收机、测深仪换能器和测深点水底的中心位置。船体中心测深点的平面位置可以通过GNSS 得到,水底高程H可以通过式(1)确定。
H=H1-h1-h2-h3 (1)
其中,H1为GNSS的高程,h1 为GNSS相位中心到水面的高度,h2为无人船的吃水深度,也就是水面到测深仪换能器的高度,h3为测深仪换能器中心到水底的高度。
水深h3是通过无人船搭载的声波测深仪来测量。测深仪记录声波从发出后经过水底反弹回测深仪的时间为t,声波在水中传播的速度为v,所测水深h3 则可以通过式(2)求出。
h3 = v·t (2)
通常情况下,水的声速v并不固定,往往与水温、含盐度、压力值等因素有关。实际工作中可根据水域类型来确定声速值,小面积、水深较浅的水域声速变化比较小,可以用一个平均声速值;大面积、水深较大的水域,水文环境比较复杂,可以通过两种方式获取声速值。一种方法为直接法,即在水域内均匀地选取几个位置,每个位置用声速剖面仪采集声速剖面,再根据声速剖面曲线处理测深数据;另一种就是间接法,即通过获取水中的温度、压力和盐度,用经验公式来计算声速值。
2.2作业流程
无人测量船系统进行水下地形测量的主要作业流程如图2所示:
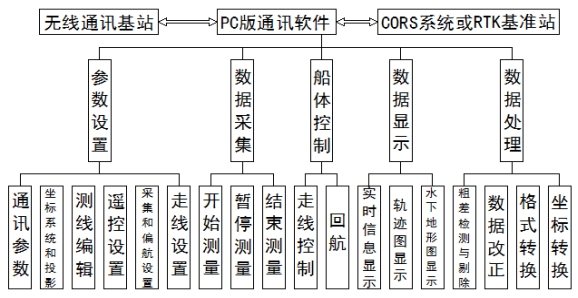
图2:无人测量船系统作业流程图
3应用实例
3.1项目简介
受昆山市河道管理处委托,我院对某河道(K0+000—K1+191.89)段清污前后水下地形进行了测量,并计算清污方量。本次需要测量水下地形面积约0.5平方公里,坐标系统采用CGCS2000坐标系,1985国家高程基准,采用Cass7.0地形地籍成图软件。
3.2施测方法
本次作业为本公司首次采用无人测量船技术,该无人船船体采用双体船设计,抗风浪比较强,航行平稳,最快航行速度可达3m/s。船体材料采用含碳纤维、凯夫拉防弹布高强度玻璃钢材质,具有耐腐蚀、船体轻、耐碰撞特点。船体吃水仅20cm,是浅水测量的极佳工具。虽然船体比较小,比较轻,但搭载的重量可达30KG。系统采用机器人智能控制技术,在测量过程中可按事先设定的航线自动走线及自动换线测量,具体测量方法有以下几点要求:
(1)水下地形测量基本上在无风的天气进行,采用断面法施测,先在测深仪随机导航软件下,预先按技术要求做好断面计划线,计划线根据河段或湖面情况布置成与水流方向大致成垂直的方向,断面间距为100m左右。
(2)测量船在线测量时,应尽量保持直线、匀速航行,变换测线时,应做到缓慢转弯,转向或变速时,及时定位,航向变化需小于5°/分钟,实际航线和计划测线的偏距应小于测线间距的25%;作业过程中测船前后左右摆动不宜过大,当浪高超过0.6米时或因风浪引起的测深仪记录上回声线波形起伏值较大时需暂停作业,在遇到其他特殊情况停止作业。
(3)开始作业前,首先和定位设备校对好时间,启动测量软件,设置好坐标系统和投影参数、并进行遥控和采集偏航及走线设置,测线间距编辑为图上10cm,把计算机的端口与测深仪相连进行通讯连接,准备就绪后进入测量状态开始测量,遥控测量船进入需要测量的水域,进行测点定位和测深,作业过程中可根据软件的实时信息显示功能显示轨迹图和地形图,随时修正无人船的航向,使无人船始终沿着主测线方向航行,按同样的方法施测其他测线。
(4)在作业过程中,有可能漏测水下地形最深点和最浅点等特征点,因为是操作软件按事先设定好的测点间距进行测点定位和测深的,因此在整理内业时,根据测深仪测深记录上的模拟记录信号,在原始记录的每秒数据中提取特征点的水深和三维坐标数据。
3.3 数据处理与绘图
外业测量数据经过编辑、校正正确后,用专业测量软件进行数据计算、水位改正。测绘的资料按日期分类别编排,所有的电子原始文件均打印备份,对所有的外业手薄进行整理和检校。采用南方Cass7.1软件,绘制水下地形图,等深线间距为1米。图幅按照《水运工程测量规范》水运工程测图图廓整饰的规定执行,图幅大小为50cm×75cm。所有地形地物符号均按《水运工程测量规范》及《1:500,1:1000,1:2000地形图图式》要求绘制,所有成果图采用AUTODESK公司的AtuoCAD2004绘制,技术报告则采用office2003编辑完成。图3为分成设色的水下地形图(多波速数据)。
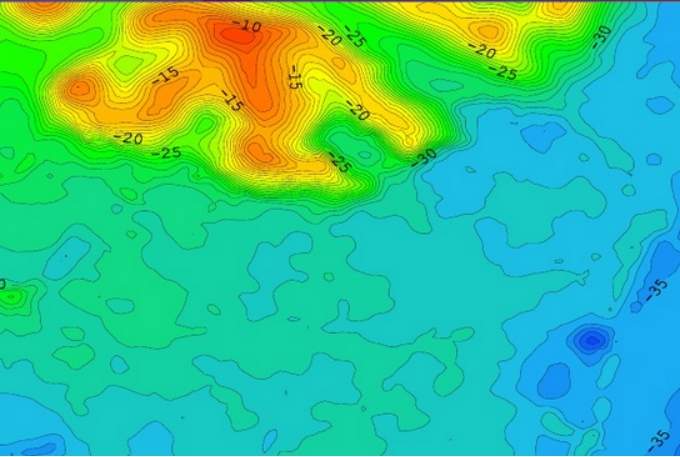
图3:分成设色的水下地形图(多波速数据)
3.4检查线布置和精度统计
检查线基本垂直于主测深线,其总长度均大于主测深线长度的5%,检查线与主测深线相交处图上1mm范围内水深点,其高程最大差值为0.2m,同时取样100点统计测深点的高程中误差, 有关技术指标见表1。
表1:检查线布置与精度统计
误差 | 0m | 0.1m | 0.2m | 0.3m | 0.3m以上 | 总数 | 不符合点 | 符合率% |
点数 | 47 | 41 | 12 | 0 | 0 | 100 | 0 | 100 |
4结束语
实践证明,无人船测量系统在河道水下地形测量中发挥出了高效的作用,经检验,采集的数据准确、可靠。吃水浅、作业灵活、可扩展、智能化、效率高等特点,使其在内河水下地形工作中具有明显技术优势,已成为现代河道测量技术的一个重要发展方向。使用过程中,我们也发现当前无人测量船存在以下需要改进的方面:
(1)采用的人工智能控制技术有待改进。智能避障功能在此次复杂环境中无法发挥有效作用。因视觉盲区和距离判断不准,在数据采集过程中距离对岸较远且情况复杂,船体与岩壁发生了两次轻微碰撞。
(2)岸基系统与测量船之间的数据传输模块有待进改进,保障测量数据的实时、完整。
(3)遥控器可考虑增加视频传输模块,将船体上安装的摄像头视频传输到遥控器。结合超声波自动避障,操控手可更加准确地判断前方障碍。
参考文献:
[1]梁昭阳.无人船测量系统在水库地形测量中的应用[J].城市勘测,2018(1):132-135.
[2]赵薛强.无人船水下地形测量系统的开发与应用[J].人民长江,2018,49(15):54-57.
[3]陈立波,罗正龙,汪嵩,等.无人船水下测量系统及水下测量实验分析[J].城市勘测,2019(5):151-154.
[4]程剑刚.网络RTK 联合声波测深仪在水下地形测量中的应用[J].测绘工程,2014(3):63-65.
[5]姚冬.水下测量中延时效应的探测与改正方法探讨[J].科技信息,2014(3):92-93.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



