神华准格尔能源有限责任公司矸石发电公司 内蒙古 鄂尔多斯 010300
摘要:本文根据异步交流感应电机的电磁转矩原理和特性,以模糊PID为控制策略,介绍了交流感应电机的双闭环控制系统。该系统以DSP电机专用控制芯片TMS240LF2407A作为主控制器;来实现其具体功能。
关键词:交流电机;双闭环控制系统;模糊PID
Research on Double Closed-loop Control System of BLDC
Liu Wen Gang
(Sheng Hua Zhun Ge Er Limited Liability Company; Inner Mongolia ZhunGeER)
Abstract: Based on the principle of AC Motor and its characteristics, designed double closed-loop control system. To achieve their specific functions, the system used DSP chip (TMS240LF2407A) as the master-control unit, and used fuzzy PID as control strategy.
Keyword: AC motor; double closed-loop control system; fuzzy PID
1 简介
在许多工业领域的应用中,交流感应电机由于效率高、维护简单、性价比高等优点已经逐渐替代以往的直流电机驱动。交流电机驱动控制技术的研究与发展已经成为当今电气传动领域的研究方向。交流驱动系统适宜非线性的强耦合的系统,交流驱动系统线性控制特性的实现仍旧是研究的难题。
一个好的调速系统一般由转矩内环和转速外环构成的双闭环系统实现。转矩内环可通过数学转换,等效为电流环。具体数学转换过程如下。
![]()
其中 ![]() ——转矩常数;
——转矩常数;
![]() ——磁通;
——磁通;
![]() ——转子功率因数。
——转子功率因数。
交流电机定子接电网,磁通![]() 近似恒定,夹角变化不大,即
近似恒定,夹角变化不大,即
![]()
![]()
![]()
![]()
![]()
2.1 双闭环控制原理
交流感应电机转速负反馈单闭环控制系统可以在保证系统稳定的条件下实现转速无静差,但又不能完全按照需要来控制动态过程的电流或转矩,因而常在对动态性能要求不高的场合采用。如果对系统的动态性能要求较高,单闭环控制系统就难以满足要求。为了改善交流电机控制系统的动态特性,就很有必要在转速负反馈单闭环控制系统的基础上再引入电流负反馈环来控制系统动态过程的电流和转矩。为了满足无超调、抗负载扰动能力强、实时性和快速响应性好的要求,系统采用转速环、电流环双闭环控制策略,电流环的一个重要作用就是保证电枢电流在动态过程中不超过允许值,即电流环首先能够起到抑止超调的作用,对于转速环,稳态无静差是最根本的要求。
2.1.1转速闭环控制
本文的研究对象为三相异步交流感应电机,其中转速环采用PI调节控制,简单可靠,其输出限幅用来限制最大转矩和最大电流。转速反馈信号可以直接采用附加反相电压来实现
或者
2.1.2电流环控制
电流环采用boost斩波电流控制,原理图如图2所示。
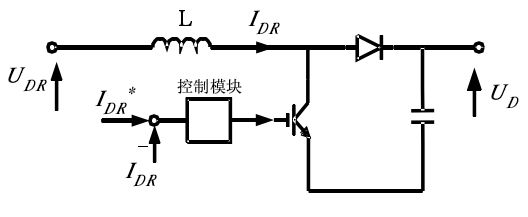
图2、boost斩波电流控制原理图
根据双闭环调速系统的基本要求,做出如图3的系统设计方案,采用转速环和电流环构成双闭环控制系统。
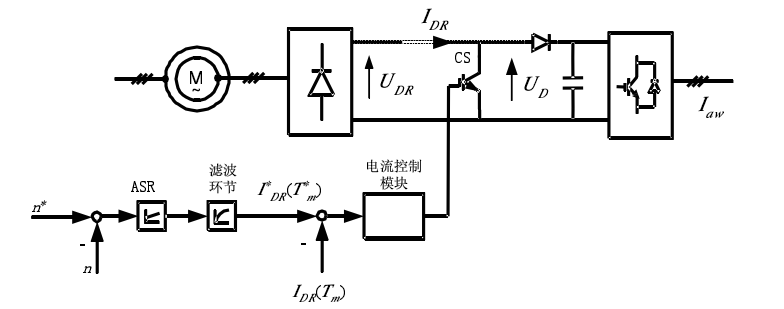
图3 双闭环控制系统框图
控制系统的计算顺序是先计算转速环(图3中主回路大闭环),后计算电流环(图3中副回路内环)。控制方式有两种:一种是同步采样控制,即主、副回路的采样控制周期相同。另一种是异步采样控制,即主回路的采样周期是副回路采样周期的整数倍。这是因为一般串级控制系统中主回路受控对象的响应速度慢,副回路受控对象响应速度快的缘故。这时应根据副回路选择采样周期,因为副回路的受控对象的响应速度较快。
从静态特性上看,电流内环有使静特性变软的趋势,电流负反馈对于转速环来说相当于一个扰动作用,只要转速环的放大倍数足够大,而且没有饱和,则电流负反馈的扰动作用就能受到抑制。而转速环采用Fuuzy-PID调节器,整个系统是无静差的调速系统。从动态响应过程来看,在瞬时加大给定转速信号![]() 时,转速负反馈很小,近似为零,转速控制器很快处于饱和状态,输出为电流环给定值
时,转速负反馈很小,近似为零,转速控制器很快处于饱和状态,输出为电流环给定值![]() ,经过电流控制器,使电动机很快地起动。
,经过电流控制器,使电动机很快地起动。
转速外环和电流内环二者共同构成串级控制系统,通过PWM 脉宽控制器,产生方波脉冲控制信号,经三相逆变器驱动电路,实现对异步交流电机的控制。 这样系统不仅能控制转速,而且能控制电流,充分利用异步交流电机的过载能力,获得较快的动态响应。双闭环系统在突加给定信号的过渡过程中表现为恒值电流调节系统,在稳定和接近稳定运行中表现为无静差调速系统,发挥了转速和电流两个控制器的作用,获得了良好的静、动态品质。
2.2 控制策略的实现
交流感应电机是一个非线性、强耦合的系统,使用常规的PID算法难免出现超调量大、响应时间长。而模糊PID控制器具有快速响应和超调小等优点,且具有很强的鲁棒性,对直流无刷电机进行控制,可获得良好的控制效果。
2.3控制系统硬件电路的实现
系统电路主要包括以下模块:DSP控制器模块(TMS240LF2407A);逆变器驱动模块、电机保护模块及电流、电压处理电路。其结构框图如图4所示。
图4 系统硬件结构框图
控制电路采用DSP-TMS240LF2407A控制器为核心。该芯片计算速度快,外围电路丰富,容易生成6路PWM脉冲信号。采用该芯片设计控制器,只需少量的外围电路即可完成所有的控制任务。
3 总结
本文设计了异步交流感应电机的双闭环控制系统。系统以DSP电机专用控制芯片TMS240LF2407A作为主控制器;以模糊PID为控制策略;来实现其具体功能。本文采用了多种保护措施,可使该系统能够安全、可靠、稳定地运行。初步试验表明该系统具有良好的性能。
参考文献
[1] Bimal K.Bose著,王聪等译.现代电力电子学与交流传动[M].北京:机械工业出版社,2005.
[2] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2000.
[3] 王保刚.一种直流电机双闭环调速单元工作原理的分析与设计[J].河南大学学报,1996,26(4):31-36.
[4]尹璐.速度与电流双闭环不可逆直流调速系统分析[J].科技情报开发与经济,2006,16(7):173-174.
[5] 乔宏明.双轮驱动电动汽车电机控制系统的研究[D].山东理工大学硕士学位论文,2008.
第 4 页 共 4 页

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号