西安爱生无人机技术有限公司 , 陕西 西安 71 0000
摘要:为了提高无人机中继通信吞吐量和传输效率,本文研究了在满足避碰、信息和无人机发射功率约束下多跳无人机中继通信系统中无人机行轨迹和发射功率优化策略,以优化端到端数据吞吐量
关键词:无人机;中继通信;轨迹优化
1无人机中继通信系统。
近年来,无线中继技术也受到相当大的关注和发展。传统的移动蜂窝通信系统有不好的边缘信号。如果我们考虑部署大量基站,我们将大幅增加成本。此外,高频波段的无线信号衰减很快,很容易造成室内信号质量差。无线中继技术可以更好地解决这些问题,例如扩大复盖范围、消除信号死区、增加系统容量和提高系统可靠性。对于高级LTE系统中的中继或卫星通信中继等传统无线中继,它们的定位灵活、部署灵活或成本高昂,传输时间也很长。无人机具有移动性好、成本低、控制灵活、易于维护和更新等优点。使用无人机作为中继平台可以很好地解决上述问题。目前,中继无人机的研究主要分为以下几类:
1.1静态中继无人机
静态中继无人机的研究主要侧重于通过优化无人机部署位置来提高无线网络性能。由于无线信号强度随传输距离的增大而减小,因此也会受到地面的影响气候的不利影响可能干扰无人机和其他通信节点之间的信息传输。为解决这一问题,可通过合理部署无人机中继位置和无人机中继节点数量,即无人机位置或优化部署,实现节点之间的可靠通信。
1.2移动中继无人机
与静态中继无人机相比,移动无人机中继可以充分利用无人机的高机动性,充分发挥无人机的辅助通信潜力。利用无人机的完全可控机动性实现通信链路信息通过优化无人机资源的路径和配置,可以调整无人机数量的质量。优化无人机航迹也是一个任务规划问题,即如何在某些限制和制约下设计最佳无人机航迹。本文提出了无人机轨迹和发射功率分配的通用数学模型,认为中继策略是解码和传输中继策略。为解决非凸轨迹优化问题,提出了一种连续突出优化方法,得到速度函数的总体下限。
1.3资源分配
随着无线通信技术的发展,资源分配研究越来越受到重视。由于现实世界各种客观条件的局限性,分配发射功率和带宽以提高通信系统的性能是首要考虑。这些问题主要是优化资源分配的问题。通常,先创建通信系统模型,然后导出目标特征。此目标函数通常会考虑系统的某些性能,包括中断概率、吞吐量、编码错误率、信息率,然后系统会受到某些约束来定义目标函数和优化问题约束,并形成资源配置优化模型。最后,解决优化系统能效和优化资源配置的优化问题。在无线中继系统中,每个节点的功率或功率以及可用的总带宽都是有限的。因此,在资源有限的情况下,研究系统的功耗和带宽是一个非常重要的问题,因此优化功耗和带宽分配是提高系统能效的有效途径。
1.4轨迹优化
轨迹优化在无人机中起着非常重要的作用。优化无人机飞行轨迹对无人机的发展很重要提高无人机的性能具有重要影响,也可以确保任务的完成。在大多数实际情况下,无人机的不同设计状态已得到广泛确定,优化无人机飞行轨迹是提高其性能的少数手段之一。
2无人机中继通信系统模型
无人机中继通信系统的结构如图1所示,主要由两个终端节点(s源节点和d目标节点)和m个无人机中继节点组成。从s到d发送的数据必须经过中继节点,即无人机节点的一部分。
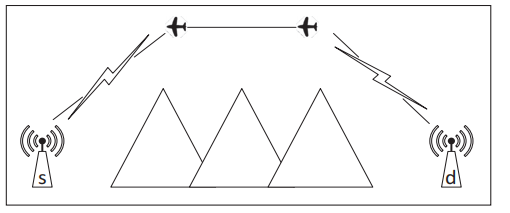
图1 UAV中继通信系统结构图
如果源节点和目标节点的水平高度均为0,则源节点s的水平坐标为![]() ,目标节点d的水平坐标如下:
,目标节点d的水平坐标如下:![]() ,同时,如果所有无人机均具有h飞行高度,并使用全球定位系统或北斗获得其水平坐标,则任何时候无人机的位置坐标可表示如下
,同时,如果所有无人机均具有h飞行高度,并使用全球定位系统或北斗获得其水平坐标,则任何时候无人机的位置坐标可表示如下![]() ,其中
,其中![]() ,T代表无人机的预定飞行时间,因此当多架无人机在空中飞行时,必须满足以下要求:
,T代表无人机的预定飞行时间,因此当多架无人机在空中飞行时,必须满足以下要求:
![]() (1)
(1)
其中dmin是无人机之间的最小安全距离。在实践中,无人机与地面节点和无人机之间的通信可被视为视距链接模型。因此,在n次时,节点s对第一个无人机的信道功率响应自由空间轨迹损失模型
![]() (2)
(2)
在公式中,β0是每参考距离单位的无线信道功率增益,两个相邻无人机之间的损失模型如下:
![]() (3)
(3)
UAV最后一个节点d之间的功率发射如下:
![]() (4)
(4)
设![]() 和
和![]() 它分别代表节点s和UAV在n个时间点的平均发射功率。节点s到目前为止的第一个无人机中继速度表示为:
它分别代表节点s和UAV在n个时间点的平均发射功率。节点s到目前为止的第一个无人机中继速度表示为:
![]() (5)
(5)
其中σ2是接收器添加的高斯白噪声功率,![]() 表示参考信号/噪音比。无人机中继过程中,采用分频复用方法将频谱分为JM≤信道,每架无人机使用一个信道。如果信息在使用后重复使用,多跳中继过程受信息的原因和效果的限制,无人机可以每隔一段时间传递元数据。源端到目标的吞吐量可以表示为:
表示参考信号/噪音比。无人机中继过程中,采用分频复用方法将频谱分为JM≤信道,每架无人机使用一个信道。如果信息在使用后重复使用,多跳中继过程受信息的原因和效果的限制,无人机可以每隔一段时间传递元数据。源端到目标的吞吐量可以表示为:
![]() (6)
(6)
在通信轨迹和无人机中继功率的联合优化过程中,我们的目标是优化信号源对目标的吞吐量。包括隙的源端和无人机中继发射功率
![]() 和
和![]() ,中继UAV的轨迹
,中继UAV的轨迹![]()
![]() ,描述为:
,描述为:
![]() (7)
(7)
四、仿真结果分析
在本节中,仿真结果验证了本文中建议的优化策略的性能。该比较试验方案包括:(1)一个反应分配轨迹优化方案,其中发射装置和无人机的发射功率相同,并通过迭代分辨率获得无人机到达收敛的轨迹;(2)具有最佳发射功率分配的分段收敛方案,即每架无人机以固定速度从源到目标飞行。如果飞行时间足够,应在固定终点悬停。如果飞行时间不够,必须以中途最高速度到达目的地节点。(3)本文件提出的备选办法。在模拟器中,发射端和接收器之间的距离为4公里,所有无人机的飞行高度为150米,无人机数量为2架,迭代次数为400次。
仿真结果表明,虽然方案2和3的飞行轨迹相似,但2中的无人机1和无人机2在源节点和目标节点上仍然相对较短,两架无人机的飞行路径曲率较大,导致发射功率浪费。因此,方案3效率更高,而方案1的飞行轨迹在无人机通过源节点和目标节点时,几乎是源节点和目标节点之间的固定连接,但它会立即返回飞行点,从而缩短数据传输时间并阻止有效的中继通信。
结语:
本文研究了多跳无人机中继系统,以无人机为空中中继实现地面节点间的通信。受无人机功率和飞行轨迹的影响,我们必须研究源和无人机传输功率有限时的吞吐量优化问题,并提出用替代优化算法求解无人机合理飞行轨迹的迭代算法,仿真结果表明,该方案中继通信时间更长。
参考文献:
[1]刘金.我国无人机发展现状及在后勤保障领域的应用[J].无线互联科技,2020,17(03):5-6.
[2]巩晨小.雾环境下非视距日盲紫外光通信链路路径损耗研究[J].半导体光电,2019,37(01):87-90+94.
[3]韩娜.5G无线网络中毫米波通信的路径损耗预测模型[J].信阳农林学院学报,2020,30(02):110-113.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



