兴三星云科技有限公司
摘要:通常农业生产工序繁杂、操作困难,在农作物培植的过程中,采摘也是极为关键的一道流程,此次研究主要以采摘草莓为落脚点,设计一种能实现草莓采摘的机械装置。同时保证草莓不被破坏的情况下,尽可能的提升摘取的效率及准确度,此次研究从草莓的培育过程及模式出发,设计了具有收集功能的包裹式自动采摘草莓机械手。
关键词:机械手;种植模式;草莓采摘;切割方案;单片机控制
中国是一个农业大国,农业发展的兴衰将直接决定我国发展的兴衰,也即“农为国本”,新时代的来临,城镇化的程度越来越高,科学技术的进步也是十分迅速,这也给农业发展提出了新的要求。第一,随着城镇化的推进,越来越多的年轻人都将选择城市就业创业,而不再从事传统农耕作业,这就使得从事农业生产的劳动力越来越少;第二,人民群众的生活水准不断提升,对美好生活的要求也越来越高,从以往的“吃饱”到如今的“吃好”,也体现了人民对农副产品更高质量的要求和希望;第三,工业化进程也在不断推进,越来越多的农用土地被用于城镇化和工业化的推进,加之较多工业都将对环境造成一定的影响,这就使得农用地越来越少,质量也随之下降。
为了有效的避免这些问题对农业发展产生较大负面影响,农业生产逐渐机械化,今年来还引入了较多智能机器技术,在高速发展的今天,智能机械作业一定是大势所趋。
关于此次草莓采摘机械的设计,有两个备选设计方案,具体如下:
软体式夹持装置和剪形切割装置
软体式机械采摘结构是近年来较新的发明成果,其机械手的设计原型是人手,这样的机械装置较为灵活且不容易破坏水果,能采摘各种大小的各种果实,在草莓采摘的过程中,机械易于破坏果实的问题是必须要考虑的,而这种装置能较好的保护果实不被破坏,实际是较为适用草莓采摘的,但实际情况是软体式多指机械装置通常需要更多的经济成本,同时草莓果体较小,要对软体式机械进行更精细化的处理设计,这样会进一步增加资金的投入,考虑到成本过于高昂,实现起来较为困难也不现实。
包络式果篮夹持装置和圆刀片割断装置
草莓果体较小且易于被破坏的特点就使得草莓不能像其他大型水果一样能使用刚性夹持装置进行摘取,在软体式夹取装置过于昂贵不能实现的前提下,考虑采用包络式夹持装置采摘果实。同时考虑草莓枝条细长柔软,一些国外的企业在采摘草莓的过程中使用直接扯断枝条的方式,这种方式对草莓的表皮会产生一定的破坏,故在实际的操作中也应当进行相应的优化。实际采用两圆刀片组成的切割装置,施加微小的压力,在刀片的作用下将较为容易的扯断果枝取下果实。
草莓夹持装置是整个机械的最关键部位,在视觉系统搜索确定位置以后,夹持装置将在机械的带动下将整个草莓果体包裹起来,然后启动切割装置将草莓果枝剪断取下草莓,草莓夹持装置机械设计图如下图1所示。
1
2
3
图1 草莓夹持部分
1.套筒2.定位装置3.圆刀片4.齿轮
就该装置而言,主要由两个工作形态所呈现,第一,将草莓与根叶相分离,第二,将草莓收集到一定的筐中,进行存储工作。在对草莓与根叶分割时,该夹持工作是固定不动的,整个过程当中,机械臂承起到牵引作用,主要承担该活动的运行;在对草莓进行收集时,主要是由主电机控制,使夹持装置发生一定角度的转动,通过传送齿轮使另一方向的夹持装置向另一方向旋转,让装置之间出现一定的缝隙,使切割好的果体落入设计好的收集装置里。
为了确保草莓果实能顺利的落下进入收集装置里,其夹持装置所旋转产生的间隙应比草莓果体略大,在实际的操作中,应根据草莓果实的实际大小和相应的原理图进行旋转幅度的选取。
就该装置而言,具体就是对草莓果实进行采摘,考虑到草莓果实个体一般较小,同时其植株种植较为密集,就不能采用苹果、梨、桃、番茄等果实摘取一致的采摘方案。苹果在收集的过程中通常采用收集、采摘分开的形式采摘,即在取下一个苹果后,由机械将该苹果通过一定的控制将其置入指定的果盘中,接着进入下一个果实的采摘,这样的采摘方式适用于苹果、梨、桃、番茄等此类植株间距大、果实个大、质量重的果实,但不适宜于采摘草莓。
在进行规划时,主要使用塑料材质的果盘作为采集的工具,该果盘为圆形,主要是以7.5厘米为半径,10厘米为高的圆盘呈现,为了获得更为精确的数据,对这方面进行了多次试验,获得如表1所示的测量结果:
表1 装满草莓的收集盆重量
实验次数 | 第一次 | 第二次 | 第三次 | 第四次 |
重量/g | 487 | 504 | 533 | 528 |
从上表中可以清晰看出,该试验使用二级以及三级不同的草莓类型分别进行了第一次以及第二次试验,而一级类型的草莓主要用于后两次的实验中,具体结果由上表所呈现。
从上述草莓培植的三种方式不难看出,所有草莓的培植方式均是合理的利用了空间的配置,采用立体的培植环境进行培育,即可等价于在一面完整的墙体上悬挂着一片草莓果实,而此次设计的机械所要完成的就是利用最快的速度将草莓从墙面上完整的摘取,并有效存储。
该研究主要就是将果实的摘取以及收集相互融合,并研制出有效的机械手,收集装置为一圆柱形装置,在收集果实的过程中,由于草莓果实的易于破坏性,不仅要使草莓准确的落入收集果盘中,还要在落下的过程中,与收集圆柱体壁不发生碰撞,故设计一空间四杆机构,以对草莓夹持装置及收集果盘加持装置的相对机械运动进行精准控制。
在实际操作中,收集装置上的果盘将向后退,主电机控制草莓采摘盘发生转动,齿轮转动带动杆件的运动,果盘会随着杆件的运动而产生运动的行为,能够将草莓精准的放入相应的容器中。当舵机完成工作复位之后,采摘果盘开始回旋,使收集装置被相应杆件带动回退,装置图如图2所示。
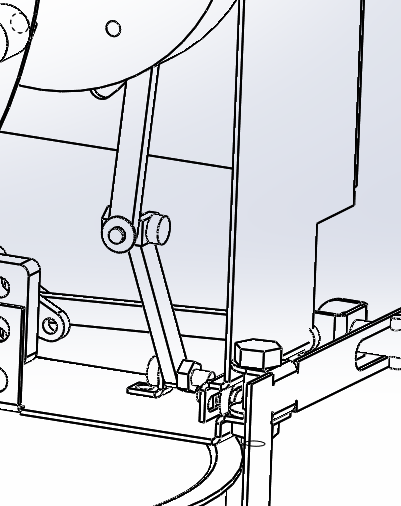
图2 传动部分
本篇文章中要制作的草莓采摘机械手,它是由两个舵机同时进行驱动的,这两个舵机如果要进行操控可以通过两种方案进行,分别是:FPDA控制、单片机控制。下面进行两个方法的对比比较。
相对于单片机控制法,FPDA控制法运行速度快,并且运行十分稳定,不会被外界的因素轻易的干扰,适合用于高速运营的线路。但是相对于电路机构来说,单片机控制法是通过PWM信号脉冲宽度来实现十分精微的变化,这种变化甚至达到了微秒级,通过这种方法来提高了对舵机的精妙控制,但是FPDA控制法虽然速度相较于单片机控制法会高一些,但是这种方式价格会很高而且电路结构十分复杂,并且这种方式的编程语言也不容易去学习。单片机控制法的系统是一个数字控制系统,对外界的干扰抵抗能力也很强,系统也很可靠。通过对着两种方式的对照比较,如果没有速度上的要求的话,我会选择单片机控制法来对舵机控制。
经过对比,选择使用单片机来对两个舵机进行控制。
科技不断进步的过程中衍生出了越来越自动化的采摘技术,而果蔬采摘的智能机器人是在农业科技自动化发现过程中十分重要的部分,也是未来发展研究的重大方向。对于各类果实蔬菜,其形状、质量特点都不尽相同,故对不同的果实蔬菜的自动化机械采摘应当适宜的制定相应的机械装置。本文通过综合考量草莓个头小、草莓表皮易于破坏、经济性等多方面因素,设计了一种包络式圆形刀片切割的自动化草莓采摘机械装置,取得了较好的效果。
[1]杨栋皓,蒋爱德.苹果采摘机械手的设计与实现[J].农业开发与装备,2020(11):117-118.
[2]马兴灶,连海山,弓满锋,陈昊龙,廖广贤,邓梓轩.菠萝采摘机械手结构设计与试验[J].山东农业大学学报(自然科学版),2020,51(04):727-732.
[3]戴显友,俞高红.西兰花采摘机械手的设计[J].装备制造技术,2020(08):108-111.
[4]郭景全.基于机器视觉的茶叶自动采摘机械手装配系统设计研究[J].福建茶叶,2020,42(07):11-12.
[5]程鼎豪.双孢菇采摘机械手末端执行器设计与分析[J].机电信息,2020(09):68-69.
6

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



