山东协和学院 山东 济南 250000
摘要:在工业中机械手的广泛应用大大提高了生产效率,文章分析机器人的机械手爪,对其结构分析,设计一款气动机械手手爪,保证手爪的稳定工作,提高生产效率。
关键词:气缸;连杆;机械手手爪
中图分类号:TH692.9 文献标识码:A
0 引 言
随着中国工业的发展,国内的制造业自动化技术也随着提高,机械手是一中工业进步中产生的产品。机械手手爪是机器人的执行单位,机械手手爪常用动力分为气动、液压、电机传动等。机械手手爪一般为卡钳式和负压吸盘。本文设计的机械系手手爪主要功能是抓取物体。气动机械手作为动力源应用广泛,其特点方便、动作快速、无污染、造价低等[1]。
在现代机械工业中,生产制造自动化和机械化已成为行业发展的趋势。机械加工、拆装,以及简单的抓取工件组装等,很多的重复操作岗位,这些简单且重复性高的操作,机械手就是针对这种需求而产生的,取代人工,节约成本。但是机械手手爪是一对物体执行单位,对于高精密的机械手其造价昂贵复杂。本次设计针对简单的操作而设计。
1 机械手手爪总体结构设计
本文为设计一款简单的气动机械手手爪
,本次设计一种连气动杆杠机械手手爪,是由手爪、机械手手爪、连接杆、连杆轴、螺母、活塞杆、活塞杆心轴、下固定板、螺栓、气缸、上固定板组成[1]。其结构特点在于:上固定板在气缸的后端螺纹上用螺纹进行连接固定,下固定板经过通孔穿过气缸的前端,上方固定板和下方固定板由两个螺栓通过螺联接的方式安装联接在一起。两个机械手手爪通过连接杆分别链接在活塞杆心轴上,而两个手爪又链接在下固定板的手爪心轴上,通过气缸的活塞杆传动连接杆使手爪围绕固定点转动。
机械手手爪包括手指、连杆、固定座液压缸等元件组成。通过气缸带动活塞杆,传动给连杆使手爪的张开和闭合实现抓取物体的动作。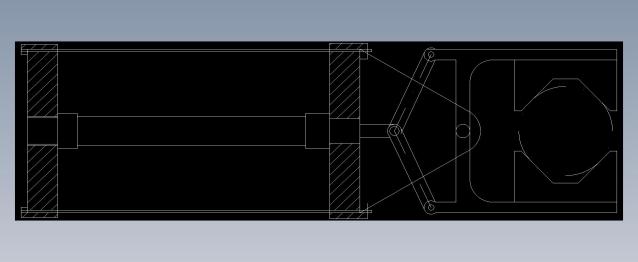
2 机械手手爪的设计
为了达到机械手能够稳定的对目标物体进行操作,机械手爪采用两爪夹手,利用连杆传动带动手抓的张开和抓取。
机械爪是机械手臂中的执行单元,本文以两爪夹手夹取圆形物体[6],与物体接触点有四个,可以稳定夹取物体。对于其他形状物体,在手爪张开的情况下,手爪张开的最大范围内能将物体包围住,即对机械手的精度也可以相应的减小,节约成本,物体在机械手爪内先与一个爪接触,随着手爪的闭合收缩,相互作用于物体,知道物体移动到手爪中心,最终稳定加持物体。
3机械手手爪结构分析
本文的机械手手爪参考一圆形物体为参照设计,那么正常情况下手爪可以抓取饮料品、水杯等圆柱形或者球形物体。但机械手手爪的长度决定了所夹取物体的大小,所以要结合实际使用情况和动作物体进行针对分析[2]。
对于易破损、易产生划痕等破环物体表面光滑程度的物体操作。可以通过对手指内侧与物体接触面进行安装缓冲垫片物体,通过增大接触面面积来减小压强,缓冲对物体的压力。同时也可以根据适和目标物体的安全负荷压力来确定适当的气缸输出的推力和拉力。一般都是按照物体理论平衡条件的气缸作用力,选择气缸作用力稍微大些的气缸。如果气缸过小,作用力不够,无法抓取物体;如果过大,又造成成本提高,增加机械手设备重量,增加耗气量[3]。
所以针对不同的物体有不通的方案、问题和矛盾。
4 工作原理
本设计正常工作时,由电磁阀控制。当机械手手爪执行松开物体动作的命令时,由控制系统控制气缸从而带动活塞杆右移,带动连接杆张开手爪,实现松开物体的动作。抓取物体,由控制系统控制气缸,带动活塞杆左移,传动连接杆实现手爪收缩,进行抓取物体的动作。通过气缸的传动带动手抓的动作[4]。
本设计结构简单,动作稳定,体积较小,工作可靠等优点。
5 设计要求
机械手手爪的设计应满足指定功能要求,结构要求和经济条件要求[5]。
(1)功能性要求:机械手手应实现稳定、快速准确的移动抓取物体,完成工作。验证手爪是否符合本次设计目标以及预期的目标结果,为后期结合机械手应用提供基础准备。
(2)结构要求:机械手手爪应适用一般的空间要求,结构应简单紧凑。即使在有限的空间下合理布局,提高空空间利用率,发挥结构优势。
(3)经济条件要求:在满足基本工作条件下,完成机械手手爪的正常工作,应尽可能的简化加工零件要求工艺,降低生产制造的成本。
6 结 论
根据本次对机械手手爪的结构设计,及其对目标物体的动作研究,我们可以设计出符合现实中工作条件的机械手手爪。本文机械手采用气缸实现机械手的张开和闭合动作,虽然气压受系统特性的影响,但本次设计是对水瓶这里物体的研究,且成本较低。

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



