雷家鑫
安徽理工大学 淮南 202000
摘要:分析采煤机调高控制系统,并对采煤机调高控制系统中的电液比例换向阀建立数学模型。在MATLAB/Simulink中进行建模后分析普通PID和模糊PID对采煤机调高控制系统的影响,比较传统PID和模糊PID的控制效果。结果表明运用模糊PID的仿真曲线响应更稳,更快。
关键词:比例阀;MATLAB;模糊控制;仿真
Research on Fuzzy and PID control based on Matlab
Abstract: This paper analyzes the height adjustment control system of Shearer, and establishes the mathematical model of electro-hydraulic Proportional Directional Valve in the height adjustment control system of shearer. After modeling in Matlab/simulink, the paper analyzes the influence of ordinary PID and fuzzy-PID on the Shearer Height Adjustment Control System, and compares the control effect of traditional PID and fuzzy-PID. The results show that the simulation curve response using mold and Pid is more stable and faster.
Key words:Proportional Valve,;Matlab;mold and control;simulation
随着现代化科学与技术的进步,采煤智能化程度的一次次提高,在滚筒采煤机中,滚筒的滚轮高度精准控制是采煤机的要点。先进的控制理论使得系统能更好的满足动态特性要求,使滚筒能够迅速、精准地跟踪煤岩界面实际的高度变化[1]。
模糊控制器是近年来发展很快的一种新型控制器,它能系统地将专家的经验输入到计算机中,使计算机在控制时可以像人一样思考并解决问题,从而达到控制被控对象的目的。本文利用Matlab/Simulink仿真软件,分别将传统PID控制与模糊PID控制应用于控制中,并作了仿真进行比较[2]。
1.1阀控非对称缸系统模型
采煤机调高系统可简化为电液比例换向阀控制液压缸,比例阀控非对称液压缸的模型如图1[3]
图1比例阀液压缸的模型
油缸无杆腔流量和缸有杆腔流量方程可分别表示为:
![]() (1)
(1)
![]() (2)
(2)
式中:y为活塞位移;为油液弹性模量;Q1和Q2为两腔流量;A1和A2为两腔作用面积;p1和p2分别为两腔压力;V1和V2为两腔容积。Cic和Cec为泄露系数[4]。
油缸和负载的力平衡方程可表示为:
![]()
![]() (3)
(3)
式中:Fg为油缸输出力;M为活塞质量;Bp为等效阻尼;K为等效负载刚度;FL为负载扰动。
根据数据分析,负载扰动FL和滑阀流量方程可表示为:
![]() (4)
(4)
![]() (5)
(5)
式中:KV为流量增益;Kc为压力系数。
将以上公式进行拉氏变换,并整合信号放大和传感器等环节,阀控缸系统的传递函数可表示为: (6)
(6)
其中Ke取1.7,Kc取值0.9,K取值1.1,反馈增益为0.75;。总结工程设计人员的技术知识和实际操作经验,建立合适的关于e、ec、ΔKP、ΔKD、ΔKI的模糊规则,如:
1.If (e is NB) and (ec is NB) then (KP is PB)(KI is NB)(KD is PS)
2.If (e is NB) and (ec is NM) then (KP is PB)(KI is NB)(KD is NS)
3.If (e is NB) and (ec is NS) then (KP is PM)(KI is NM)(KD is NB)
......
49.If (e is PB) and (ec is PB) then (KP is NB)(KI is PB)(KD is PB)
本文采用的传递函数为:
![]() (7)
(7)
其中比例增益Kp取值0.04,积分增益取值0.03,微分增益取值1.2。对具体输入的模糊推理及输出情况,输入各种不同的数据
[5]。结果如图2,红色为PID控制法的输出信号,黑色为模糊控制法的输出信号。
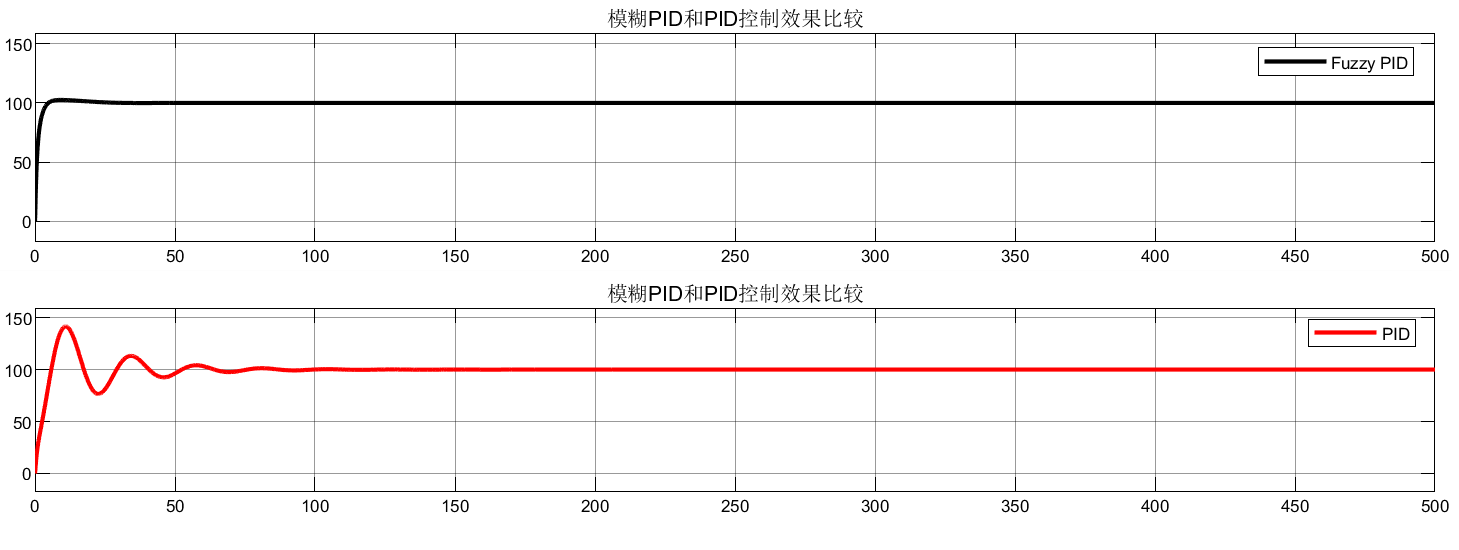
图2:PID控制法与模糊控制法仿真结果波形
4 总结
利用仿真工具,在此次试验中通过改变反馈的增益来调节最终波形达到稳定的值,表明模糊控制法易去掉超调,波形峰值较小,调节时间较短,能获得比PID控制法要小、无超调、调节时间较为短的输出波形。
[1]王振臣,刘建旺,张聪,程菊.基于遗传算法和模糊PID的采煤机滚筒调高系统研究[J].中国矿业,2014,23(01):133-136..
[2]戴冬梅,刘正生.传统PID控制与模糊控制方法的仿真比较研究[J].科技资讯,2008(07):8+11.
[3]赵丽娟,李苗.采煤机自动调高系统的模糊PID控制仿真[J].辽宁工程技术大学学报(自然科学版),2016,35(10):1075-1080.
[4]张远辉,刘章棋,陈虹均.基于模糊算法采煤机滚筒高度控制性能研究[J].液压与气动,2020(08):82-87.
[5]Zhen-long Zhao,Zhi-jie Wen. Design and Application of a Mining-Induced Stress Testing System[J]. Geotechnical and Geological Engineering,2018,36(3).
作者简介:雷家鑫,男,1995年出生,硕士研究生。主要研究方向为智能控制
E-mail:1159918474@qq.com

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



