中铁一院集团陕西铁道工程勘察有限公司 陕西 西安 710043
摘要:无人机线路航测视频制作目的在于将地形图线路方案直观形象展示在视频中,减少后期因加盖房屋,耕地类型变化引起的经济纠纷。本文从应用背景、设计准备、技术要求、项目策划组织、资料提交、总结6个方面介绍航摄技术在铁路勘察设计结算的应用。
关键词:无人机航摄技术;铁路勘察设计;资料收集;航线规划;视频剪辑拼接;成果输出
1 应用背景
无人机线路航测视频制作目的在于将地形图线路方案直观形象展示在视频中,为专业调查困难地段提供素材,记录线路所过地的植被植貌以及地物,减少后期因加盖房屋,耕地类型变化引起的经济纠纷。同时通过不同形状、颜色的符号对桥隧工点、村庄、道路河流等重要地形地物表示,更象形直观的展示现场情况,便于展示汇报。
2 设计准备
收集项目测区资料,合理采用无人机型号,提前准备好空域申请资料,便于到测区做航飞报备。
3 技术要求
执行的标准及规范:
(1)《通用航空管理条例》;
(2)《民用航空空中交通管理规则》;
(3)航摄区域相关政府关于无人机管理条例;
(4)项目业主的相关要求和文件。
4 项目策划组织
根据现场情况,安排人员并选择合适仪器设备,制定航飞方案,委派具有UTC驾照的专业人员操作无人机进行航摄外业视频采集,然后进行内业视频后处理。
(1)外业航摄组:负责根据现场情况制订飞行计划,执行外业飞行任务;
(2)视频后处理组:负责视频加工处理、后期裁剪与编辑、制作字幕等。
根据现场地形选择满足要求的无人机,制订拍摄方案。以甘肃某项目为例,由于航飞区域海拔接近3000m,属于高原地区,且现场交通困难,无人机载重量不小于3公斤,续航时间不短于25分钟。视野宽度不小于150米。综合以上因素,本次航摄选取大疆悟2无人机搭载禅思X5S云台相机,并配备高原桨进行现场航摄视频采集工作。无人机各控件参数如表4.1所示。
表4.1 无人机主要参数
类别 | 项目 | 特性 |
飞行器(大疆INSPIRE 2) | 轴距(不含桨) | 605mm |
最大起飞重量 | 4kg | |
起飞海拔高度 | 普通桨:2500M 高原桨:5000M | |
最大飞行时间 | 27MIN(使用Zenmuse X5S) | |
最大俯仰角度 | P模式:35°,A模式:35°,S模式:40° | |
最大上升速度 | P模式/A模式: 5m/s;S模式:6m/s | |
最大下降速度 | 垂直:4m/s;斜下降:4-9m/s | |
GPS悬停精度 | 垂直:±0.5m,水平±1.5m | |
工作环境温度 | -10℃至40℃ | |
云台相机(Zenmuse X5S) | 外形尺寸 | 140×98×132 mm |
重量 | 461g | |
传感器 | CMOS,4/3英寸 | |
有效像素 | 2080万 | |
图像分辨率 | 4:3, 5280×3956 ;16:9, 5280×2970 | |
视频存储格式 | RAW,ProRes,MOV,MP4 | |
工作模式 | 拍照模式,录像模式,回放模式 | |
曝光模式 | 程序自动曝光,手动曝光,快门优先曝光,光圈优先曝光 | |
ISO范围 | 100- 6400(视频);100 - 25600(照片) | |
电子快门速度 | 8-1/8000秒 | |
可控转动范围 | 俯仰:+30°至-90°,平移:±320° | |
结构设计范围 | 俯仰:+50°至-140°,平移:±330°,横滚:+90°至-50° | |
最大控制转速 | 俯仰:90°/s,平移:90°/s | |
遥控器 | 工作频率 | 2.400-2.483GHz;5.725-5.850GHz |
发射功率 | 2.4GHz:26dBm(FCC);17dBm(CE);20dBm(SRRC)5.8GHz:28dBm(FCC);14dBm(CE);20dBm(SRRC) | |
控制距离 | 2.4GHz:7km(FCC);3.5km(CE);4km(SRRC)(无干扰、无遮挡):5.8GHz:7km(FCC);2km(CE);(SRRC)5km | |
电池 | 容量 | 4280mAh |
重量 | 约515g | |
电池使用温度 | -10℃至40℃ | |
控制面板(IPAD) | DJI GO 4 | 检查无人机各项起飞参数 |
DJI GS PRO | 导入航线、规划航线,控制无人机按预定航线飞行 |
现场航摄工作从2018年6月25日开始,至2018年7月19日结束,总共用时25天。航飞有效里程总计206.6km。外业航摄工作主要有:资料收集、航线规划设计、现场航飞。具体每日安排示例如表4.2所示:
表4.2航线规划
6月30日航线规划 | |||
航线 | 起点里程 | 终点里程 | 备注 |
1 | DK144+700 | DK148+900 | |
2 | DK148+800 | DK150+300 | |
3 | DK151+200 | DK155+300 | |
4 | DK155+200 | DK159+300 | |
资料收集由项目负责人和技术人员从定测一队和定测二队分别收集汇总。主要有:线路CAD图、全线1:2000地形图、中线水平单、中线和边线KML文件,全线桥隧站工点说明等。
本次外业航摄工作采取从中川机场到武威方向,循序渐进。由于飞机最长续航25分钟,考虑到返航预留安全电量和飞机飞行速度。根据之前航摄经验和现场测试得出每组电池可支持航摄最长距离为4.2km,为了视频后续拼接和剪辑的过渡性和完整性,每个航线和上一个航线航向重叠0.1km。并且根据桥梁、隧道和站场的分布,每天晚上提前规划安排好第二天航线。然后根据规划航线,将CAD线条转换成对应航线里程的KML,导入控制面板。即完成每日的航线规划。
现场航摄,主要是依据航线规划设计,在每个航线起点附近选取开阔、人烟稀少、GPS信号强的地点作为飞机起飞点。然后根据现场环境,主要是风力,设置飞行参数:飞行速度、云台倾角、飞行高度设置。设置完成后通过控制面板开始航摄,驱车跟随无人机,时刻注意无人机飞行上空状况,知道航线完成,在航线终点附近寻找合适地方遥控飞机降落。直到完成航摄任务。
采用视频编辑软件,根据线路方案,字幕标注线路里程及车站、桥、隧道进出口等工点。
视频后处理软件主要为EDIUS和Adobe After Effects CC 2018。
EDIUS主要用于视频的剪辑和拼接。主要用于初期每日采集视频起飞、返航、降落部分多余部分视频的裁剪。然后将剪辑好的几个批次视频拼接成一个视频;还有后期视频经过AE添加中线、边线和里程、工点等在EDIUS里面输出一个全线MP4格式(占用内存小)的视频。
将EDIUS剪辑好的视频在AE2018里面进行添加中线、里程、边线、工点、地物添加处理。
中线颜色表示分为两种,隧道段落用青色双线表示,其他段落用红色双线表示。
中线根据线条谷歌图做好追踪,保证相对地面位置不变,还原设计位置。
里程分为百米标和公里标。
百米标、公里标根据线条谷歌图做好追踪,保证相对地面位置不变,还原设计位置。
边线按距中线左右各30米的拆迁范围进行处理,用黄实线表示。
工点按图形示例加文字注记表示主要有桥梁、隧道。
地物主要以指示线加文字注记表示,主要有村庄、道路、河流、大型建筑物。具体示例如下。
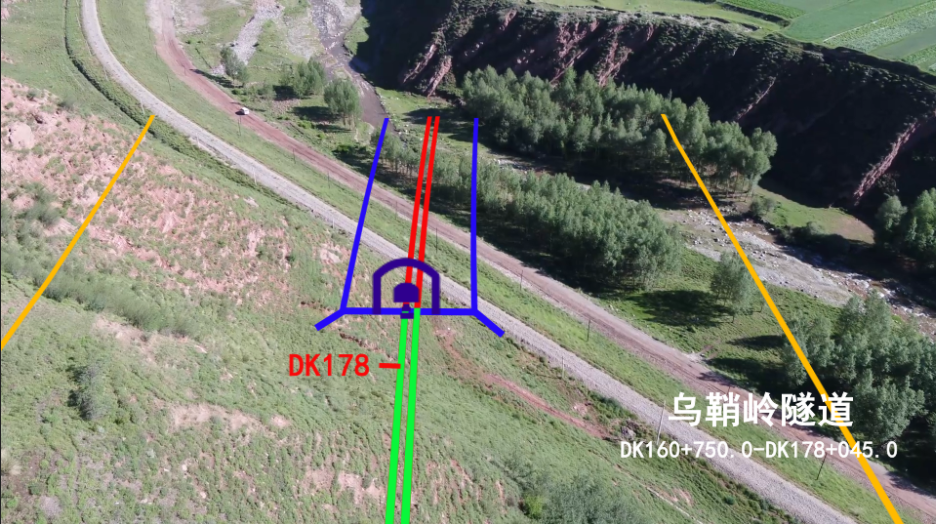
图4.1示例图
航摄视频中添加完中线、里程、边线、工点、主要地物地形后将视频做渲染输出。输出后导入EDIUS中进行剪辑拼接输出全线视频成果。
5 资料提交
项目结束后应及时规整资料文档,提交资料有:
1、航摄视频成果刻录的光盘。
2、带航摄视频成果的U盘。
3、成果报告(电子版和纸质版)
6 总结
随着无人机技术的迅速发展与成熟,利用无人机航摄技术来为勘察设计服务的应用越来越多。利用无人机航摄视频在铁路勘察设计阶段提供服务,一方面做了现有地物地貌的视频留证,另外也减少了专业人员到崇山峻岭中调查的频次,减少了安全隐患。后续会在更多的项目中推广应用。
参考文献
[1]陈百国.多旋翼无人机技术在防汛抢险中的应用探讨[J].中国防汛抗旱,2018,28(2):70- 72.
[2]李建.无人机低空航摄技术在川东北山区滑坡调查中的应用[J].测绘与空间地理信息,2020,43(2):216- 218.
[3]骆叔鹏.论无人机遥感技术在测绘工程测量中的应用[J].黑龙江科技信息,2016(30):119.
第 6 页

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



