浙江华展工程研究设计院有限公司 浙江宁波 315000
摘 要:近年随着来城市轨道交通的迅猛发展,目前已有超过38个城市开展了城市轨道交通的建设。在地铁施工阶段,为保证地铁周边道路畅通,大部分站间隧道均采用暗挖或盾构法的施工工艺,传统的测量控制均以联系测量+支导线的形式进行隧道内的方位传递,随着线路长度的增加将导致误差的积累,影响着隧道贯通精度,更严重的可能造成线路偏位。因此,对于长、大隧道采用其他测量手段进行复核已十分必要。
关键词:道路畅通;陀螺;交通
一、陀螺定向测量
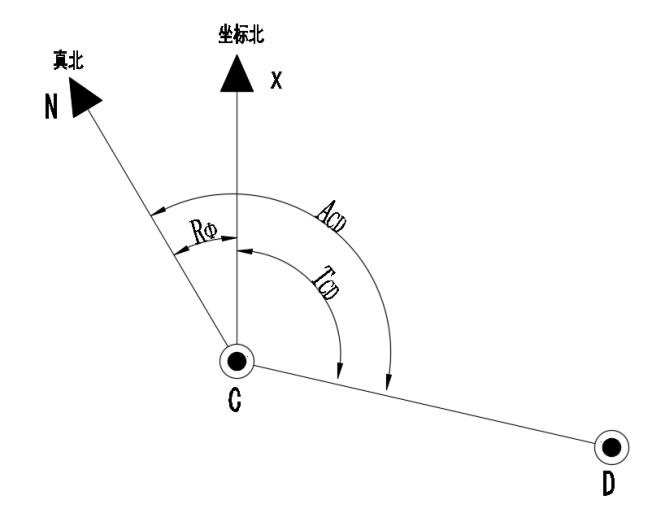
陀螺定向测量(gyrostatic orientation survey)是用陀螺经纬仪(全站仪)测定某控制网边的陀螺方位角,并经换算获得此边真方位角,最终推算待定边坐标方位角的过程。陀螺仪具有两个基本特性:1、定轴性,2、进动性。在轨道交通土建阶段主要应用其两个基本特性进行方位的精确定向。主要测量原理如下:
设C、D待测点,在C点安置仪器测得真北方向在水平度盘的读数N0,D方向在水平度盘上的读数N1,则可求得CD边的真北方位角ACD=N1-N0。因CD边坐标方位角TCD=ACD-RΦ,且RΦ= (RΦ:C处的子午线收敛角,
(RΦ:C处的子午线收敛角, :C点横坐标,
:C点横坐标, 为C点纬度)。
为C点纬度)。
在轨道交通外业生产过程中按地面已知边→地下定向边→地面已知边的顺序进行。即:
(1)在地面控制边进行多测回定向测量,标定仪器常数;
(2)在地下待测边各进行多测回定向测量;
(3)以地面控制边进行多测回定向测量,检验仪器的稳定性和精度并最终确定仪器常数。
外业测量需满足如下指标要求:
(1)测回间陀螺方位角较差应小于20″。
(2)两次地面控制边测量结果均值之差不得大于12″。
(3)测前、测后各三测回测定的陀螺全站仪常数平均值较差不应大于15″。
二、数据处理
外业测量结束后数据处理按如下方法进行:
(1) 地面标定仪器常数计算公式

式中: 为仪器常数;
为仪器常数;  为地面已知边坐标方位角;
为地面已知边坐标方位角;
 上为地面已知边陀螺测量定向方位角。
上为地面已知边陀螺测量定向方位角。
根据地面控制点已知坐标计算得到地面已知边坐标方位角 ,再由地面两次陀螺定向结果求平均 ,得到仪器常数。
(2) 测量地下待测边
在地下待检验的导线边上架设陀螺全站仪,用逆转点法定向,由多测回测量结果计算平均值得到地下待测边的陀螺方位角。
(3)计算子午线收敛角差值
由于地面边和地下边所在位置不同,由高斯投影造成的子午线收敛角也不同,两处位置的子午线收敛角有一个差值,可以根据公式计算。
子午线收敛角差值  (
( -
- )
)
式中:
 为子午线收敛角差值,单位为秒;
为子午线收敛角差值,单位为秒;
为地下待定边端点的横坐标(km); 为地面已知边端点的横坐标(km)。
(4)计算地下边的坐标方位角
地下边坐标方位角α下计算公式为

式中: 为地面控制边坐标反算方位角; 为地面控制边实测陀螺方位角;
 为地下待测边实测陀螺方位角;
为地下待测边实测陀螺方位角;
为地面已知边和待定边子午线收敛角差数。
本篇结合某市2.1km轨道交通土压平衡盾构区间为实例,在1km位置通过两井定向测量+导线网与NTS-342G10全站式陀螺仪定向测量进行数据对比分析:
陀螺方位角测量值统计表
项目 | 方位 | 方位角(°′″) | 平均值(°′″) |
地面第一次 | JMBM03→JMDT01 | 214°09′02.8″ | 214°09′06.4″ |
地面第二次 | JMBM03→JMDT01 | 214°09′10.1″ | |
隧道内 | JXRS0555→JXRD0695 | 54°57′17.1″ | \ |
陀螺定向计算表
项目 | 方位 | 角度(°′″) | 仪器常数(°′″) |
坐标方位角 | JMBM03→JMDT01 | 214°21′10.8″ | 0°12′04.4″ |
陀螺方位角 | JMBM03→JMDT01 | 214°09′06.4″ | |
JXRS0555→JXRD0695 | 54°57′17.1″ | ||
子午线收敛角差值 | JXRS0555→JXRD0695 | -0°00′08.8″ | |
陀螺定向坐标方位角 | JXRS0555→JXRD0695 | 55°09′12.7″ | |
陀螺定向坐标方位角与坐标反算方位角对比表
项目 | 方位 | 方位角(°′″) | 差值(″) |
坐标反算方位角 | JXRS0555→JXRD0695 | 55°09′18.8″ | 6.1″ |
陀螺定向坐标方位角 | JXRS0555→JXRD0695 | 55°09′12.7″ |
三、结论
经实例数据进行数据对比分析,地面已知边两次定向测量较差7.3″,最终导线网实测坐标方位角与陀螺定向测量计算坐标方位角较差6.1″,成果较差已能完全满足贯通测量要求,同时能对导线网进行有效检核,保证隧道的贯通误差满足要求,提高数据的稳定性及可靠性。因此对于大于1.5km的长隧道采用其他陀螺定向测量进行必要监测十分必要。
参考文献:
[1] 张石聪.陀螺仪在竖井定向测量的应用[J].世界有色金属,2016(12).
[2] 李学仕,郑成沛.陀螺定向测量在广州地铁鱼大区间的应用与研究[J].铁道勘察,2008, 34(1).
[3] 罗来恩.坐标方位角计算新方法[J].测绘通报,2004(05).
[4] 季凯敏.王解先.利用大地坐标计算真方位角的两种方法[J].工程勘察,2009(04).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



