杭叉集团股份有限公司 浙江杭州 311305
摘要 三相异步电机以其体积小,维护简单、可靠性高、动态控制性好等优点,已经在电动叉车上得到广泛的应用。本文主要研究电动叉车用交流驱动系统,主要包含三相异步电机交流电机及其控制系统,从交流驱动系统的特点、转差频率控制、矢量控制、弱磁控制等方面,阐述了交流驱动系统在电动叉车上的应用。
关键词 交流驱动,电动叉车,矢量控制 ,弱磁控制
引言
随着国内物流市场的发展和进步,叉车的销售量也同时稳步提升,采用交流异步电机变频调速技术的电动叉车由于其优良的动态控制性能,节能和环保并举,现已逐步取代柴动叉车和直流电动叉车,成为国内外叉车发展的新趋势。异步电机已经成为电动叉车的主要动力类型,电动叉车驱动系统及其所采用的控制方案是决定电动叉车性能的关键技术。因此,研究低压交流异步电机的相关控制技术,可以更好地引领未来我国叉车行业的快速发展。
一、交流驱动系统和直流的对比
直流电动机定子采用磁钢或者线圈绕组励磁,转子电枢为线圈绕组,直流电机运行时,通过机械换向器实现电流换向,保证电机的持续旋转。由于采用了机械换向器,使得它的转速、功率密度、使用寿命都受到了限制,同时它的重量和体积也较大,运行噪音大。控制方面,直流电机具有优良的调速特性,调速范围宽广、调速平滑、方便,而且控制算法简单,控制器成本较低。
交流感应电机定子为电枢绕组,转子一般为鼠笼或结构,运行时通过定子绕组产生旋转磁场和鼠笼转子感应实现转子的旋转,所以不需要机械换向结构。因此,交流电机具有结构简单、调速范围宽、相应速度快、制造、使用、维护方便,运行可靠性高等优点。调速控制上,因为交流电机定子和转子磁场的强耦合性,调速控制难度比较大,控制器成本比较高。
虽然交流感应电机调速系统比较复杂,成本较高,但随着现代交流电动机调速方法的不断改进,交流电动机的调速性能已经赶上了直流电动机。目前国内大部分电动叉车都采用了交流感应电机驱动系统。
转差频率控制
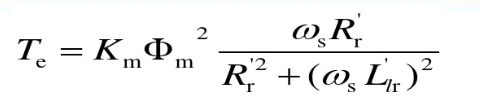
异步电机转差频率控制方法是按转子磁链定向的间接矢量控制系统,不需要进行磁通检测和坐标变换,并具有控制简单、控制精度高、具有良好的动、静态性能等特点。异步电机转差频率控制的转矩方程为:
式中 为电磁转矩,
为电磁转矩, 为电机转矩的结构常数,
为电机转矩的结构常数, ,气隙磁通量,
,气隙磁通量, ,转差角频率,
,转差角频率, 折算到定子侧的转子每相电阻
折算到定子侧的转子每相电阻  折合到定子侧的转子每相漏感
折合到定子侧的转子每相漏感
上式中,电机稳态运行时, 远小于 。可以发现,通过控制 转差频率,可以直接改变异步电机的电磁转矩。
基于以上公式,可以发现异步电机在调速过程中,转差频率控制能够保证电机定子电压频率与转子角频率同步,因此电机在加减速过程中,能够平稳过渡;同时电机启动瞬间,速度偏差信号达到最大值,系统将以最大转矩输出,电机能够快速启动,系统响应速度快。然而,转差频率控制系统是基于电机稳态数学模型建立起来的,没有对磁链进行动态控制,此种方法动态特性较差,而叉车的实际运行工况较为复杂,扭矩和转速波动都很大,所以转差频率控制在叉车应用效果不是很理想。
矢量控制
矢量控制技术是一种用矢量表示目标电压,并通过变频器生成三相对称正弦电压波形,来控制电机的磁场方向和力矩大小的一种电机控制技术,又被称为磁场导向控制技术。目前电动叉车主流都是采用矢量控制技术。
异步电机磁场定向矢量控制的策略,基本思想是把交流电机模拟成直流电机进行控制,把磁链矢量的方向作为坐标轴的基本方向,采用矢量变换的方法实现交流电机的转速和磁链控制的完全解耦,得到类似于直流电机的优良动态调速性能,可使异步电机调速系统具有更高的调速精度、更大的调速范围和更快的响应速度。
根据异步电机在两相静止坐标系和两相旋转坐标系下数学模型,通过定子电流和转子磁场定向计算,实现控制解耦,典型的系统控制框图如图1所示。
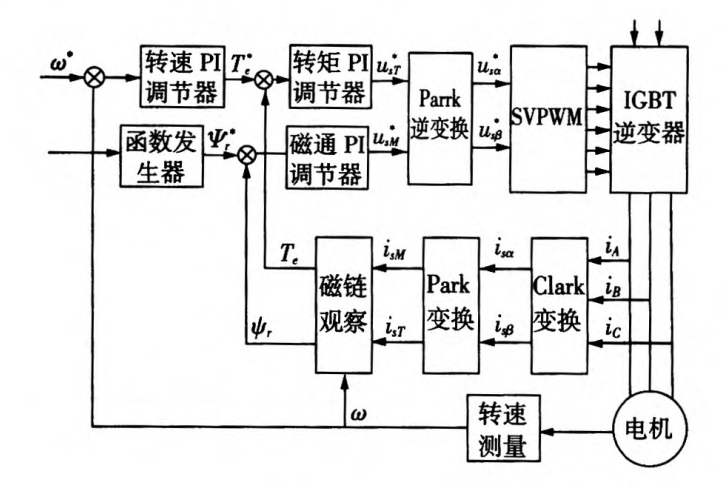
图1. 异步电机矢量控制系统框图
在图1中,电机相电流的检测通过电流传感器,采集三相电流 、
、 、
、 ,再经过 Clarke和Park变换,得到同步两相旋转坐标系上与电机磁通和电机转矩有关的电流分量
,再经过 Clarke和Park变换,得到同步两相旋转坐标系上与电机磁通和电机转矩有关的电流分量 和
和 ,进而通过计算可以得到电机的转矩
,进而通过计算可以得到电机的转矩 和磁通
和磁通 。再将两者分别与转速调节器输出的参数
。再将两者分别与转速调节器输出的参数 和函数发生器中计算出的磁通参数
和函数发生器中计算出的磁通参数 进行比较,并通过PI调节器来修正控制信号,以此得到转子磁场同步旋转坐标系上的电压分量、
进行比较,并通过PI调节器来修正控制信号,以此得到转子磁场同步旋转坐标系上的电压分量、 、
、 。通过Park逆变换, 和 转化为与逆变器输出的电压空间矢量具有相同坐标系的电压分量
。通过Park逆变换, 和 转化为与逆变器输出的电压空间矢量具有相同坐标系的电压分量 和
和 ,最后采用 SVPWM技术,产生逆变器开关导通状态的PWM波形,通过逆变器的变频控制,达到电机调速的目的。相比转差频率控制,矢量控制使得驱动系统的动态性能大大提高,非常适合电动叉车的运行工况。
,最后采用 SVPWM技术,产生逆变器开关导通状态的PWM波形,通过逆变器的变频控制,达到电机调速的目的。相比转差频率控制,矢量控制使得驱动系统的动态性能大大提高,非常适合电动叉车的运行工况。
四、弱磁控制
电机在额定转速以上运行时,由于电压不能再升高,只能通过减小磁通而达到提高转速的目的,即弱磁升速。针对电动叉车的工况需求,一般要求低速的时候需要输出较大的转矩,同时需要比较宽的调速范围来适应不同的工况。另外在还需要使叉车在高速运行的时候需要保持较高的效率。而叉车一般采用低压供电源,这将限制驱动系统速度调节范围,因此应采用弱磁控制方法提高电机转速,同时也可以保证高速轻载运行时的效率。常用的传统弱磁方法有以下几种:
第一种方法是在电机转速高于额定转速后,将定子磁链参考值反比于转速变化。在弱磁区异步电机的转矩输出能力依赖于控制策略,通常应用于基于定子磁链定向的控制策略中,参考磁链过高或过低都将导致输出转矩下降。传统的弱磁方法不能在已有的限制条件下获得电机的最大转矩输出能力。这种方法是常见的弱磁控制方法。但是,升速的快速性和带载能力差,且弱磁范围小。
第二种是恒压弱磁,这种方法保持电机电压为额定电压,根据电压控制环的输出来控制电机的励磁电流,与电机参数无关,但转矩电流和励磁电流耦合强,电流调节器易于饱和。
第三种是励磁电流的解析控制。电机的励磁电感存在磁饱和现象,电感参数会随着励磁电流的调整而发生变化。因此,在电机及励磁电感建模的基础上,采用精确的弱磁电流解析形式,提高电机的转矩输出能力和动态响应。但这类方法的有效性依赖于电机参数的准确性,励磁电流控制开环,鲁棒性较差。
结语
交流电机具有结构简单、调速范围宽、相应速度快、运行可靠性高等优点,随着现代交流电动机调速方法的不断改进和完善,交流电动机的调速性能已经赶上了直流电动机,其在电动叉车上的应用会越来越普遍。针对电动叉车运行的复杂工况,采用矢量控制同时配合以弱磁控制算法,能够使得叉车驱动系统的动态调速和相应性能大大提高,实现叉车整体运行性能的提升。
参考文献
[1]殷庆付,电动叉车交流驱动系统研究,哈尔滨工程大学
[2]朱修敏,兰森林,马黎,魏力.异步电机矢量控制技术在电动汽车驱动系统中的应用[J] ,黑龙江电力,2016,38(03):240-242.
[3]蔡钿,陆炳良,康乐.异步电机弱磁控制的研究[J] ,船电技术 ,2014,34(05):70-73.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



