民航安徽空管分局
摘 要 S模式二次雷达解决了传统模式A/C模式雷达的相关的运行问题,具备了数据链能力,提供更丰富的监视信息,成为当今空管监视领域主要核心的监视探测系统。随着S模式雷达的广泛使用,面临的询问码短缺和信道拥塞问题突显出来,S模式雷达组网技术可以很好解决这类问题。本文从研究S模式雷达多站点的聚类组网(clustering)出发,提出了一种基于动态整数规划和启发式方法的站点组网方案。本文描述了实现这一设想结果的一些步骤,提出了该问题的数学公式和启发式方法。
一、S模式介绍及组网技术研究现状
模式S是空中交通监视中最重要的技术之一,它支持二次监视雷达(SSR)、防相撞系统(TCAS)以及广播式自动相关监视(ADS-B)的运行。在S模式雷达中,S表示Selective,通过使用选择询问方式来降低应答率(即下行链路信道中的拥塞)及应答中的脉冲重叠(串码)。但是,S模式雷达需要进行全呼询问后才能建立选择询问,即需要获取飞机的24位地址码,并发送自身的询问器代码给飞机,用于锁定策略。S模式雷达已经独立运行了很长一段时间,近年来,S模式组网作为一种解决询问器代码短缺和射频(RF)信号拥塞等问题的方法备受关注,欧控(EUROCONTROL)确定S模式雷达组网的标准,这是模式S网络实现的方法之一。
(一)S模式雷达运行方式
1.全呼捕获
全呼询问用于搜索出现在雷达覆盖范围内的新目标,全呼询问没有目标地址,采用24个“1”作为地址,所有未被锁定的飞机依据询问捕获概率进行应答,最大询问频率不超过250Hz。通过接收飞机的全呼应答,雷达获取目标的大致位置和S模式地址,建立全呼列表。飞机可以雷达询问信号进行询问器代码锁定,不再相应后续全呼询问。询问器代码有II(询问识别码)和SI(监视识别码)两种,其中II码有16个,SI是64个,但是不是所有飞机都能处理SI,所以只能使用II码,而可用的II码仅有13个(II=0作为保留,一个保留用于军事操作,一个保留用于测试设备)。
2.选呼跟踪
目标被全呼捕获后,雷达开始跟踪目标并进行点名询问,即选呼。选呼中包含目标地址且在预期的目标位置进行询问。在预期位置指定地址的目标向雷达 进行选呼应答。选呼过程中也会发送锁定命令,通过锁定询问器代码来抑制全呼应答。这种方法能够减少不必要的全呼应答,减少信号拥塞。单部雷达全呼和选呼运行如图1所示。

图1 S模式雷达询问过程
(二)技术现状
国外对S模式组网技术研究较多,也比较充分。S模式组网是属于集合覆盖组合问题,是NP完全问题,即问题解决的时间复杂度是指数级,不能在多项式时间内完成。随着站点的增加,得到最优规划方案的时间往往会很长。一般采用近似算法解决此类问题,得到较快的速度和接近最优的近似解。Eurocontrol提出解决II码分配和II码冲突问题的解决方案就是使用雷达组网这项技术。Galati G 等人将组网问题视为图论中的着色问题,运用整数规划和基于启发式算法的解决方案。Koga T提出了S模式组网的自主锁定覆盖图构建技术。Kim E 提出了利用ADS-B数据改变SSR全呼方式以减少频谱拥塞,并且所提出的方法减少了所需询问器标识符代码约为50%的数量的使用。
国内在组网方面研究较少,主要针对二次雷达S模式运行和功能,S模式数据处理和融合技术等。程擎、杨光提出了基于模拟退火算法的S模式雷达组网的研究,这是基于遗传算法的一种改进。孙华飞等提出基于图论的雷达优化部署方法,主要针对于空防雷达。
本文在国内外S模式雷达组网集群规划方法上进行进一步研究。
二、动态启发式S模式组网机制
(一)组网集群问题描述
从机载的角度来看,每个组网都被视为一个单独的监视实体,属于一个组网的雷达之间共享信息(飞机航迹);一个组网中的雷达具有相同II代码,相当于一部覆盖范围非常广的S模式雷达。那么将S模式雷达组网规划一个重要约束条件是询问器代码的稀缺性。对于给定数量的N个模式S站,如何组网,即从具有N个站的1个集群到N个独立站的极限情况(即根本没有集群),这里有许多条件可以约束,最重要的是以下几点:
(+) 最小化使用的II代码数量
(+) 最小化所有询问应答(S模式通道的拥塞),或者最大重叠区域
(-) 组网控制器的成本,如站点故障时下组网的不稳定问题
(-) 组网内雷达之间的数据传输成本和链路成本
在上面的列表中,(+)表示扩展组网的因素,(-)表示限制组网的因素,这里的“成本”具有可靠性/可用性/生命周期成本的广泛含义。从运行的角度来看,有必要尝试将覆盖重叠的S模式站点进行组网,特别是当重叠区域流量很大时。因此,组网聚类策略的输入是2个变量,一个是S模式站点的集合,每个站的覆盖区域位于给定的高度(例如10000m);另一个是对应交通密度的航线网络。下面介绍利用图论的方法进行建模,模型建立站点图网络结构,并定义了“相邻”的一对覆盖范围有重叠的站点。在航路覆盖图中考虑了航路结构,进行动态规划。
(二)数学模型建立
首先顶一个图G(V,E),V表示S模式站点集合,就是图的顶点,E表示边的集合,指示两个站之间的覆盖重叠。通过将图划分为一个个子图,每个子图就是一个集群,即一个组网。我们定义一个0-1的变量yij,表示两个站在一个组网中,如下:

这里有个约束条件,就是如果yij=1,yik=1,那么yjk=1,意思是站点i和站点就是一个组网,站点i和站点k是一个组网,那么站点j和站点k也是一个组网。可以表示如下:

我们将参数aij和sij分别定义为一对站点之间公共航道的密度及其覆盖范围的重叠程度,设定aij的下限为𝝳a,sij的下限为𝝳s。那么得到下面两个约束条件,M是一个大的正数:


这两个约束条件说明两个站点在一个组网中,必须密度和重叠程度超过门限值。最后一个约束条件是组网中雷达数量不能超过设定的上限𝝳R,如下:

定义组网约束条件后,还要考虑II码的分配问题。II码分配问题可以转化为图着色问题。在II代码分配问题中,一种颜色是一个II码,我们希望为每个节点(站)分配一种颜色,使得同一组网中的每个节点具有相同的颜色,至少共享一条边的两个组网必须分配不同的颜色。这里定义一个0-1变量xhi,表示如下:
计C为可用II码集合,就是颜色数量上限,假设颜色编号从1到C。这里涉及到以下约束条件:

同一个组网中颜色必须一样,那么得到以下约束条件:


最后,两个相邻的,就是存在覆盖重叠的组网,必须使用不同的颜色,约束条件如下:

到此我们得到了所有的约束条件,规划的目标就是使得II码使用最少,引入一个整数K表示II码使用数量,有如下目标函数:

由此,我们得到组网的整数规划,如下:

subject to



设置相应门限数值后,可以lingo、matlab等工具进行计算,获取最小的K值,属于NP-Hard问题。
(三)动态规划方法
本文提出一种动态启发式方法加快计算的过程,对于DP[n]这样的规划问题,可以从子问题DP[n-1,n-2…1]找到解决方案。这里需要将图G(V,E)进行转化,将每条边 增加一个权重表征成交通流密度,在一定数量的站点覆盖重叠区域内,将V转化为航线交叉点和雷达站的覆盖区域定义,这样可以覆盖区域的着色来表征站点着色,如覆盖区域不涉及的雷达则单独运行。
增加一个权重表征成交通流密度,在一定数量的站点覆盖重叠区域内,将V转化为航线交叉点和雷达站的覆盖区域定义,这样可以覆盖区域的着色来表征站点着色,如覆盖区域不涉及的雷达则单独运行。
实际应用中雷达覆盖区域是视距范围,可以利用Global mapper、Radio Mobile、WRAP等软件来评估,航线航路都是已知的,交流密度可以用某天的飞行量来定义,图3是一幅Global Mapper绘制的7800米高度安徽区域12部雷达覆盖重叠情况及交通流密度热点描述。
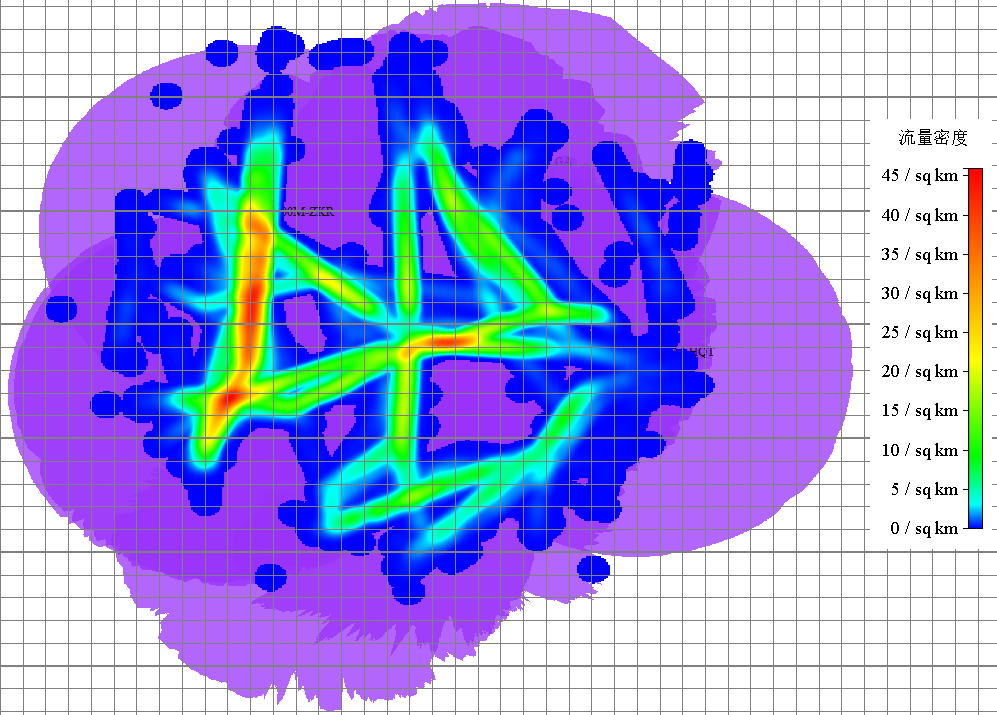
图3 雷达覆盖及交通流密度
我们仿真了30部S模式雷达进行组网,得到结果如表1所示,由于站点位置及交通流的差异性,模拟结果差异很大,结果体现了交通流密度是组网的一个重要影响因子。模拟中也发现,门限设定不合理时,问题将会无解(II码超过13个),这时就必须调整相应覆盖重叠门限和交通流密度门限。
表1 30部雷达模拟结果
覆盖重叠门限 | 航线密度门限 | 组网数量 | 平均每个组网的站点数 | 单独站点 |
30% | 15 | 7 | 4 | 2 |
30% | 30 | 10 | 3 | 5 |
对于站点较少的S模式雷达组网方法(如站点数小于13),建议使用贪心算法,两个原则:一是每个组网内的雷达数量不大于3,二是交通流密集的覆盖区域的雷达组网。
三、结论
本文立足于解决S模式站点组网问题,提出了动态启发式的组网方案优化方案,通过仿真的方式得到模拟结果,后期还需要进行实际验证。对于S模式组网技术来说,还有很大的研究发掘空间,可以根据特定空域的集群来优化其S模式网络的运行,后期研究从以下方面入手:组网优化中加入站点分布和航线结构因子;依据交通流密度,自适应调整组网结构;将组网策略扩展到ADS—B(自动相关监视)和MLAT(多点监视)站点;组网中站点的加入和退出优化问题;尝试拉格朗日收敛的方法解决组网整数规划,以及使用神经网络算法进行组网方案的评估系统的实现。对于较少站点组网,建议用贪心算法,不力求最优解。随着S模式组网系统的发展和不断探索,必能建立更为安全、可靠、高质的空中交通监视体制。
参考文献
[1] 二次雷达原理. 张尉. 国防工业出版社 . 2009
[2] 多站询问对邻近二次雷达的影响及其对策[J]. 张尉,何康,林强. 空军雷达学院学报. 2012(02)
[3] 雷达通信一体化组网目标定位算法研究. 胡飞. 电子科技大学 . 2015
[4] A New Transmit Beamforming Method for Multi-User Communication in Dual-Function Radar-Communication[J]. Xue Yao,Yu Liu,Zaichen Zhang,Xianxiang Yu,Guolong Cui. Journal of Beijing Institute of Technology. 2021(01)
[5] 程擎,杨光.基于模拟退火算法的S模式雷达组网算法[J].航空计算技术,2020,50(04):9-13.
[6] S模式二次雷达协同监视功能系统仿真[J]. 水泉,余飞侠. 现代信息科技. 2020(06)
[7] 王广宇.空管雷达组网覆盖和数据传输问题的改进[J].硅谷,2011(17):62-63.
[8] Specification for the Mode S IC Allocation Coordination and IC Conflict Management. Eurocontrol. 2013
[9] European Mode S Station Functional Specification. Eurocontrol. 2015
[10] Annex 10 to the Convention on International Civil Aviation Aeronautical Telecommunications Volume IV. ICAO. 2017
[11] Clustering Methods for Mode S Stations:Evaluation and Perspectives. Galati G,Caramia M,Piracci E,et al. Air Traffic Control Quarterly . 2016

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



