中车永济电机有限公司 山西省永济市 044502
摘要:永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)非常适合于电动车驱动,然而如果转子初始位置检测不正确,起动转矩将减小或伴随一时的反转,会直接影响PMSM驱动系统起动性能。本文主要对永磁同步电动机起动方式进行研究。
关键词:永磁同步电动机;起动方式;起动性能
永磁同步电动机起动问题
同步电动机的电磁转矩是定子旋转磁场与转子磁极相互作用而产生的。但它们仅仅在相对静止时,也就是转子以同步转速旋转时,才有恒定方向的转矩。当电动机起动时,如果仿照异步电机那样直接在三相定子绕组中通以额定频率的三相电流,那么转子磁极还没动,但定子电枢绕组通过三相交流电形成的以同步速旋转的磁场,使得转子磁极所受的电磁转矩的方向瞬息交变,每经半个周期,转矩方向就改变一次,因此转子所受的平均转矩等于零。所以同步电动机没有起动转矩,就不能自起动。如图1所示,为永磁同步电动机起动过程。
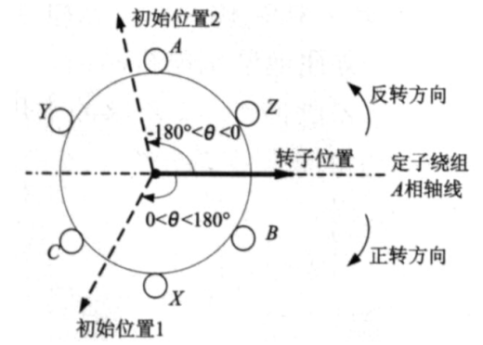
图1永磁同步电动机起动过程
常用起动方法的比较
①定子电流的频率由低到高逐渐增加,最终将转子牵入同步速;②利用绝对式光电码盘或旋转变压器获得转子磁极的初始位置,再给出相应的起动转矩实现起动;③采用带有简单磁极定位功能的增量式光电编码器。它输出两组信息:一组用于检测磁极位置,带有绝对信息功能,三路彼此相差120°的脉冲U、V、W;另一组完全同增量式光电编码器,输出三路方波脉冲A、B和Z。利用U、V、W三路信号可先确定转子的大概位置,再一边通入定子电流一边根据A、B两路信号的先后次序来将转子初始位置角度范围缩小,通过多次循环最终达到所需的精度要求;④在电机起动之前向定子通入直流电,产生一个静止的磁场以便将转子转到事先约定的零位置上,这样就完成了转子位置初始化。进行转子位置初始化时,电流可取额定值以便于产生足够的定位转矩。
以上四种方法各有优缺点:第一种方法对硬件没有特殊的要求,可适应不同的硬件系统,但无法实现最大转矩起动,所以效率较低,耗时较长,同时也增加了编程上的工作量;第二种方法具有较高的精度,但对系统的硬件即位置反馈装置进行了限制,具有一定的局限性,且成本较高;第三种方法在转子微小转动的基础上可获得较高精度转子初始位置角,但其实现必须以DSP为基础配以较复杂的程序,并对光电码盘提出了较高的要求,实现起来比较麻烦;而用最后一种方法在对电机转子进行初始定位时必须较大范围地转动转子,尤其在对极对数较小的电机进行定位时。但它在对光电码盘、控制器等硬件要求很低,程序上也容易实现的条件下实现了电机的最大转矩起动,所以不失为一种有工程价值的好方法。
基于GPC的PMSM-DTC起动控制
在检测转子初始位置后,就正式进入了起动阶段。速度控制器必须具备良好的速度跟踪性能,还必须考虑变速平顺性,因为速度变化不平滑将产生振动,如在汽车起步的10~20km/h速度范围内,不合适的速度变化将产生颤振;若采用传统PI调节器,尽管具有较快的响应速度,但积分器很容易进入了饱和状态,系统产生超调或振荡;因此利用广义预测模型依赖性小、鲁棒性强等优点,采用广义预测算法控制给定转矩。基于GPC的PMSM直接转矩控制结构原理如图2所示。
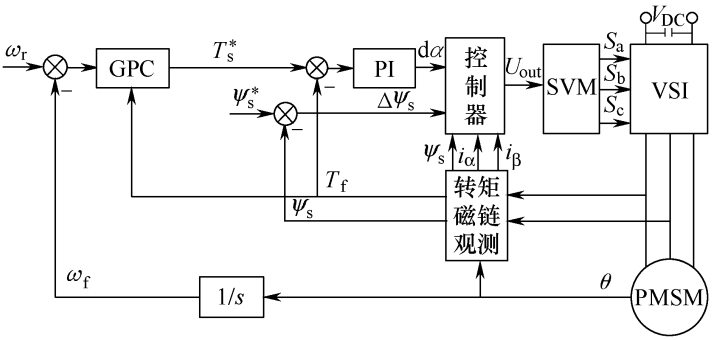
图2基于GPC的PMSM直接转矩控制结构图
一种永磁同步电动机起动校正的软件设计
根据光电编码器的信号来判断电机是否起动和起动是否正确,然后根据各种情况进行相应的起动校正。经过一次校正程序后,并不是马上按照校正后的角度发出电流指令,而是要延时200ms(等到电机运行基本停下来后才开始发出校正后的电流指令,这样做可以防止电机在校正运行时造成电机机械上的冲击)。图3是电机起动校正子程序流程图,该程序是嵌套在永磁同步电机控制的主程序中,每2ms执行一次。
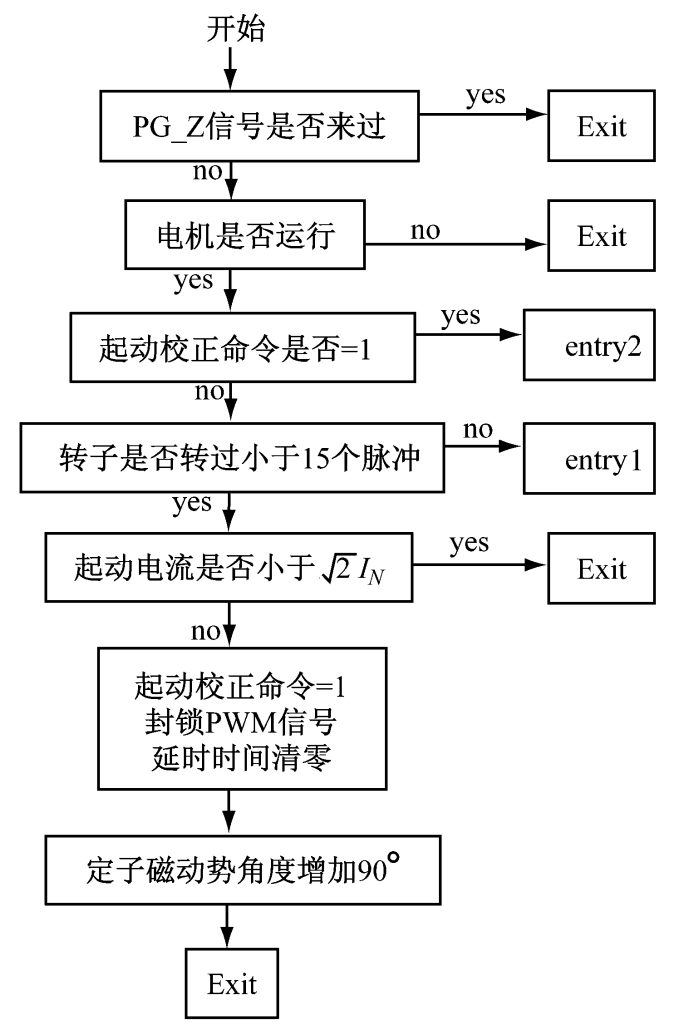
图3电机起动校正子程序流程图
电机在发出起动命令后起动电流到达额定电流的1.5倍后,采样到的光电编码器的码盘信号不超过15个时,判断为电机处于停转或者基本停转的状态(采用额定电流1.5倍作为电机的起动电流就是考虑到实际情况,使用的光电编码器转动一周,能够发生6000个脉冲,控制的电机是2对极,这样15个脉冲信号相当于转过1.8°电角度,采集这样微小的角度变化可以做到电机起动校正的迅速性,也可以保证在二次校正的时候认为起动时的位置基本不变。);电机已经动起来,但是实际运行方向与运行指令不一致;电机起动后可以进行再次校正。
从实际电机起动校正的结果看,如预料的一样。电机校正过程中,会略微有一点停顿(这是延时后重新起动的效果),然后顺利地起动起来了。这证明软件实施方法是正确的。
结语:
本文对永磁同步电动机起动方式进行研究,介绍了几种常见的起动方式,同时提出了一种起动控制策略,设计一种起动校正软件。对永磁同步电动机,依然有很大的完善空间,应该继续对永磁同步电动机进行深入研究,不断提高永磁同步电动机的运行水平。
参考文献:
陈书锦,李华德,李擎,马保柱.永磁同步电动机起动过程控制[J].电工技术学报,2008.
李路菁,周波,王莉.永磁同步电动机起动问题的分析与解决[J].微特电机,2007.
韩林,赵荣祥,翁力.一种永磁同步电动机起动的新方法[J].中小型电机,2003.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



