北方重工集团有限公司, 辽宁 沈阳 11014
摘要:随着城市化和工业化步伐的加快,盾构法施工技术已被广泛应用于铁路隧道、城市地下工程等领域。另外作为全断面掘进机的重要功能部件的管片拼装机对整个地下施工具有重要的影响。基于此本文对盾构管片拼装机电液控制进行了详细探讨。
关键词:盾构;管片拼装机;电液控制
随着我国城市地下交通建设进程的加快,盾构施工技术已成为国内工程界的研究热点,而保证隧道成形质量的主要设备是管片拼装机,它主要负责将管片安装到刚开挖好的隧道表面,形成衬砌,使隧道一次成型。要实现对管片拼装的准确定位,就必须采用电液控制技术。
一、管片拼装机简介
管片拼装机又称举重臂,用来拼装隧道预制管片的设备。安设在盾尾内的盾构中心,随着盾构推进的同时,不断拼装隧道管片,使隧道结构一次成型。有环型支承和中心轴支承两种,用于钳住一块管片绕盾构中心回转、沿径向伸缩和沿盾构轴线平移,以保证拼装的管片可在任何位置上安装就位。
管片拼装机的拼装效果能直接影响管片拼装质量和隧道挖掘的效率,所以盾构机工作时必须保证其功能的稳定性。它具有结构复杂、工作效率要求高、工作负载大、定位和检测难度大、动态与静态特性复杂等特点。
盾构管片拼装机工作原理为:首先管片输送系统把管片输送到管片拼装机的正下方,然后管片拼装机运动到管片的位置,通过抓取部分抓紧管片,然后通过管片拼装机的回转机构、提升机构、平移机构,把管片移到要安装的位置,调整好位置后后进行管片安装,安装完后用螺栓进行固定。目前管片拼装多采用错缝拼装,根据盾构机姿态偏差确定一号管片安装位置,然后按顺序安装。最后拼装楔形管片,在拼装楔形管片时要进行插入拼装。
管片拼装的质量将直接对地下水土的渗透和表面沉降产生影响,管片的拼装速度又直接决定着盾构的掘进速度。因此,拼装准确、拼装质量高且省时的管片拼装机成为全断面掘进机的关键。
二、盾构管片拼装机液压系统
先进盾构管片拼装机的运动过程共由7个动作组成,包括纵向移动,沿掘进方向的直线运动;径向移动,沿盾体径向的运动;周向回转,沿盾体圆周方向的回转运动;管片头的回转,管片以盾体的任意径向射线为回转轴的回转运动;管片头的摆动,管片母线与盾体中心线平行度的调整;管片头的倾斜,以管片本身的中心母线为回转轴的回转运动;管片的抓持。上述管片拼装机的6个自由度运动及一个抓持运动均由液压控制系统来实现。
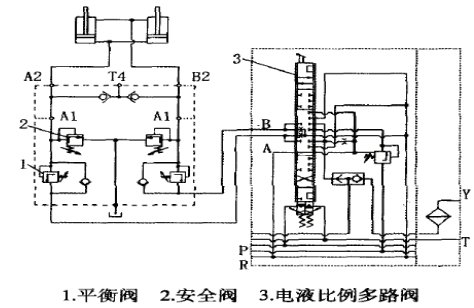
1、纵向移动液压系统。管片拼装机纵向运动时运动范围大,行程为2000mm;位置精度要求高,要求能满足轴向定位的精度;运动惯量大,带负载后的总运动质量大于10000kg;运动空间大,全范围运动时,将占据盾体的全断面。根据纵向移动的要求,设计了如图1所示的纵向移动控制液压系统,其控制模块主要由平衡阀1、安全阀2和电液比例多路阀3组成。该系统具有以下特点:
①管片机的纵向运动控制采用带负载补偿型的电液比例多路阀,既能满足大范围快速的移动要求,又能兼顾轴向准确定位的要求。
②双向运动均设计有安全保护阀,如图1中的平衡阀和安全阀,它们可防止运动过程出现挂拉、卡死时,损坏设备。
③保证双向运动的平稳性,系统采用回油背压的方案,来解决管片拼装机在启动运行和停止过程中产生的冲击,也为轴向的准确定位提供条件。
图1 纵向移动控制液压系统简图
2、周向运动控制液压系统。管片机周向运动控制采用安全冗余的设计原则,用两个电液比例多路阀共同完成控制任务,一旦某个控制阀出故障,用另一个控制阀仍可将机构调整到安全姿态,以便维修;在应急情况下,使用一个控制阀也可完成管片拼装任务,但工作效率会低一些。
管片周向运动控制液压系统的电液比例多路阀出口压力油大部分进入马达平衡模块,另一小部分压力油则经梭阀自动选取A、B油口最高压力,然后通过三通减压阀后去控制液压马达制动液压缸。
马达平衡制动模块在管片拼装机周向回转液压系统中占有重要地位,本系统中选取的是Bucher公司的马达平衡控制专用模块。该马达平衡控制模块能有效降低由于管片质量较大而引起的超越负载的影响。其性能完善,体积小,工作可靠,而且此控制模块集马达的平衡控制、防气蚀控制、制动控制、无泄漏保压控制和安全保护控制多项功能为一体,是理想的马达控制模块。
系统中两个马达均带机械制动,这样管片机回转的安全保护措施有:第1个马达机械制动,第2个马达机械制动,无泄漏保压制动(平衡阀制动)。
3、管片头抓持、姿态控制液压系统。它主要完成管片头的抓持动作和管片头的回转、摆动及倾斜3个方向的姿态控制,其主要原理为:在管片头抓紧中,系统对安全性要求高,因只能在可靠抓紧后,方能启动后续的操作,但同时还要考虑到空载操作问题,这个矛盾可由电气控制系统的控制逻辑来实现;抓紧系统中有一个压力继电器和一个行程开关,均可提供抓持的状态信息。抓持动作存在负向负载,需考虑平衡问题,因而在系统中选用单向平衡阀。为了以防压力过高,损坏管片和设备,系统加装了安全阀。系统中液控单向阀用来防止泄漏,保证管片在长时间内被可靠抓持。
由于管片头回转用液压缸的行程较小,根据计算控制所需的流量很小,所以选用小流量的电液比例方向流量阀作为控制元件,以此来满足姿态调整的精度要求。同时选用双向平衡阀来解决负向负载的平衡及防气蚀问题。系统中采用进口压力补偿阀,以此来稳定流量,起负载敏感作用。
管片头摆动控制液压系统与管片头回转液压系统相同。另外,管片倾斜姿态控制与管片径向移动控制共用一套控制系统,两个液压缸一伸一缩实现差动控制,达到调整管片倾斜姿态的目的。同时需注意,姿态调整是微量调节,其控制过程与移动定位相同。
参考文献;
[1]胡国良.盾构管片拼装机液压控控系统[J].工程机械,2015(11).
[2]吴顺文.盾构管片拼装机电液控制分析[J].广东建材,2016(04).

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



