襄阳技师学院 441021
摘要:顺序控制是自动化控制系统中较常见的一种控制形式,西门子S7-1200系列PLC中没有专用的顺控指令,设计者可以利用PLC内部铺助继电器,按照步进顺序控制的要求,采用“起保停编程法”或“置位复位编程法”等编程方法,用普通的梯形图来设计满足顺序控制要求的程序。
关键词:顺序控制、顺序功能图、步、步的转移、顺控梯形图
目前西门子小型PLC逐渐使用S7-1200系列PLC,该系列PLC具有模块化、结构紧凑、功能全面等特点。S7-1200没有顺序控制专用的指令和软元件,无法使用专用的顺控指令和顺控继电器编写顺序控制程序。通过反复实践和多次应用,笔者发现只要理清了顺序控制的思路,按照步进顺序控制的要求把设备的各种状态及转移关系罗列清楚,利用PLC辅助继电器,使用梯形图来编写程序也能达到顺序控制目的。
用普通梯形图编写顺序控制的方法有很多,本文重点介绍“起保停编程法”和“置位复位编程法”两种基本方法。
一、顺序功能图的基本形式和要素
在PLC编程中常用顺序功能图来表达顺序控制系统的动作顺序,常用的顺序功能图分为单一顺序、选择性顺序和并行性顺序三种形式,顺序功能图的构成一般由以下几个要素组成,:
1.矩形框:表示顺序控制的各个步,实际编程中各步的控制位一般采用M元件的若干个连续的位状态表示;
2.有向连线:连接相邻的两个步,连线箭头的方向表示步转换的方向;
3.转换条件:有向连线上的短横线表示步与步之间转换,转换的条件在短横线旁标出,一般用I区的外部输入信号或定时器/计数器的输出触点来表示;
4.步的动作:说明各步需要完成的动作,主要为Q区的输出信号。
二、梯形图编写顺序控制程序的方法
在实现西门子S7-1200步进顺序控制功能时,可采用“起保停编程法”和“置位复位编程法”来编写梯形图程序,对应的梯形图如图1所示。图中S表示各步的控制位(Si-1为上一步、Si为当前步、Si+1为下一步);C为各步的转换条件(Ci为Si-1步转换条件、Ci+1为Si步转换条件);B为各步执行的动作(Bi为当前步动作、Bi+1为下一步动作)。
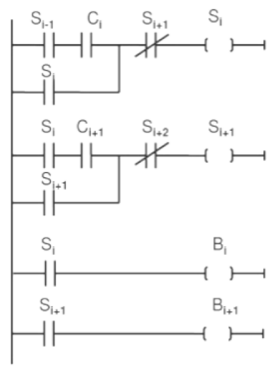
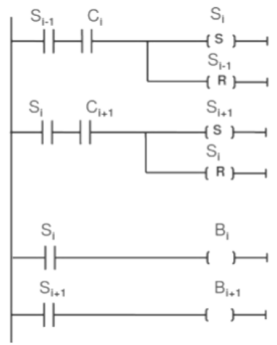
(a)起保停编程法 (b)置位复位编程法
图1 顺序功能图的梯形图编程
三、顺序控制程序的编程举例
某组合机床动力头的运动过程分为三种状态:快进—工进—快退,其动作过程如下:
(1)动力头在初始位置(SQ3)时按下启动按钮后,动力头快速前进;
(2)动力头快进碰到SQ1后,以工进速度前进;
(3)动力头工进碰到SQ2后,快速退回;
(4)动力头快退碰到SQ3后停止,完成一个工作循环。
(一)顺序控制编程的基本步骤
1.分析控制要求,将控制过程分成若干个工作步,明确每个工作步的功能,弄清步的转换是单向进行还是多向进行,确定步的转换条件,必要时可画出控制的工作流程图(如图2(a)所示)。
2.为每个步设计控制位,控制位最好使用位存储器的若干个连续位。如果采用定时器/计数器的输出作为转换条件,则应为其指定输出位。
3.确定所需输入和输出点的个数,选择PLC机型,分配PLC的I/O信号,列出I/O分配表。
4.在以上基础上画出控制过程的顺序功能图(如图2(b)所示)。
5.根据顺序功能图编写相应的PLC梯形图程序。
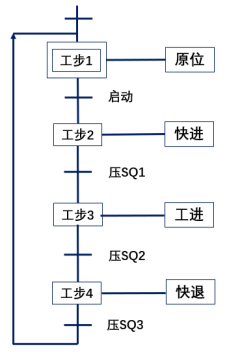
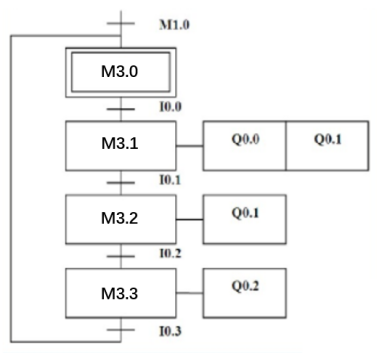
(a)工作流程图 (b)顺序功能图
图2 组合机床动力头动作流程图
(二)顺序控制梯形图的编写
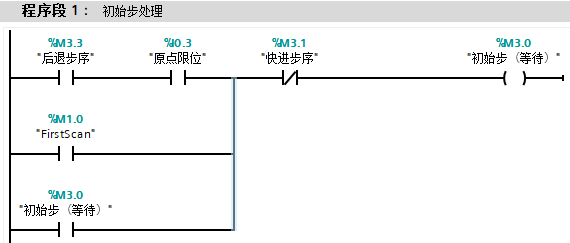
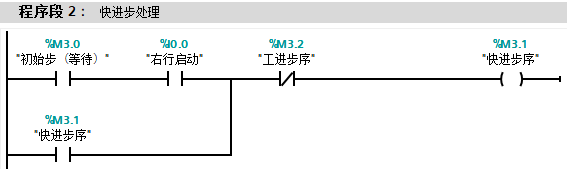
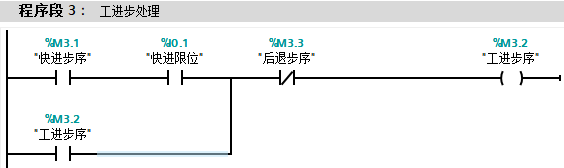
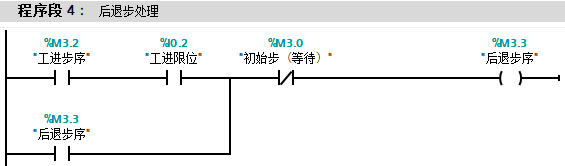
1.用起保停法编写顺序控制梯形图
表1 组合机床动力头控制程序(起保停法)
梯形图程序 | 程序注解 |
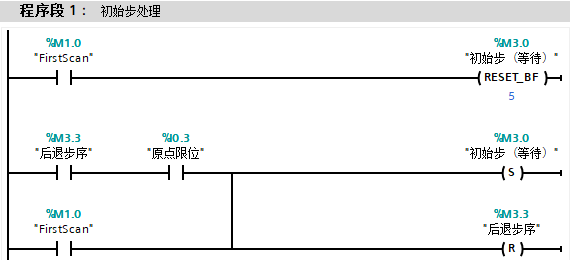
| (1)程序运行的第一个扫描周期M1.0接通,激活初始步M3.0,关闭后退步M3.3。 (2)当后退步M3.3活动时动力头后退碰到原点限位信号I0.3后,激活初始步M3.0,关闭后退步M3.3。 |
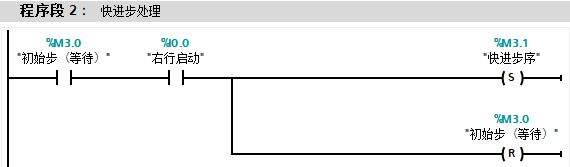
| 当初始步M3.0活动时按下右行启动按钮I0.0接通后,激活快进步M3.1;关闭初始步M3.0。 |
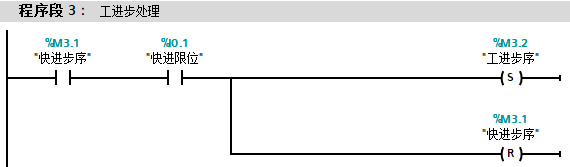
| 当快进步M3.1活动时动力头右行碰到快进限位信号I0.1后,激活工进步M3.2;关闭快进步M3.1。 |
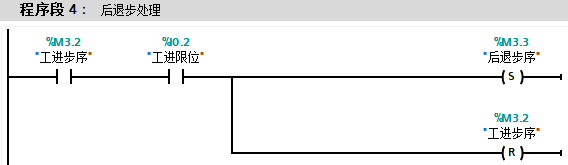
| 当工进步M3.2活动时动力头右行碰到工进限位信号I0.2后,激活后退步M3.3;关闭工进步M3.2。 |
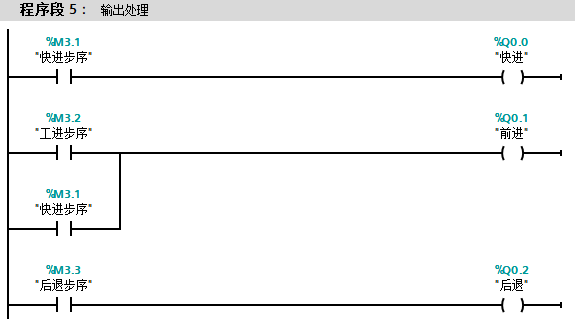
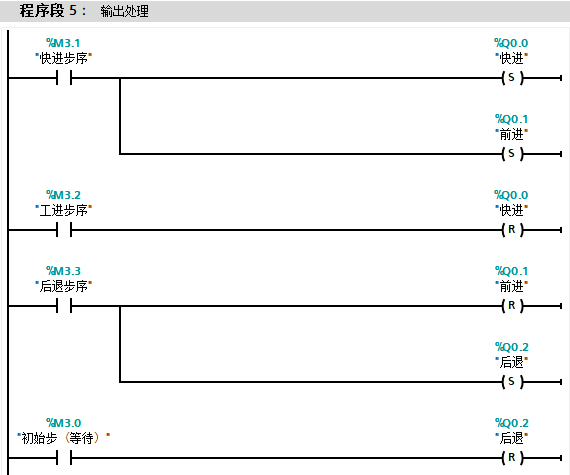
| (1)快进电磁阀Q0.0在快进步M3.1活动时输出; (2)前进电磁阀Q0.1在快进步M3.1和工进步M3.2活动时输出; (3)后退电磁阀Q0.2在后退步M3.3活动时输出; |
2.用置位复位法编写顺序控制梯形图
表2 组合机床动力头控制程序(置位复位法)
梯形图程序 | 程序注解 |
| (1)程序运行的第一个扫描周期M1.0接通,激活初始步M3.0,关闭后退步M3.3。 (2)当后退步M3.3活动时动力头后退碰到原点限位信号I0.3后,激活初始步M3.0,关闭后退步M3.3。 |
| 当初始步M3.0活动时按下右行启动按钮I0.0接通后,激活快进步M3.1;关闭初始步M3.0。 |
| 当快进步M3.1活动时动力头右行碰到快进限位信号I0.1后,激活工进步M3.2;关闭快进步M3.1。 |
| 当工进步M3.2活动时动力头右行碰到工进限位信号I0.2后,激活后退步M3.3;关闭工进步M3.2。 |
| (1)快进电磁阀Q0.0在快进步M3.1活动时输出; (2)前进电磁阀Q0.1在快进步M3.1和工进步M3.2活动时输出; (3)后退电磁阀Q0.2在后退步M3.3活动时输出; |
编写顺序控制程序,最重要的是要抓住顺序控制中步的转换,即只有活动步的动作才能被执行;当前步为活动步且满足转换条件时,当前步转换到下一步,并关闭当前步。只要理清了顺序控制的思路,灵活使用PLC的基本指令反复实践,就一定能编写出满足工艺要求的控制程序。
3

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号