特警学院 北京 100621
摘要:四旋翼无人机是一种新型空中机器人,在民用领域以及军用领域均比较常见。本文首先对四旋翼无人机的飞行原理和模型进行介绍,然后对四旋翼无人机姿态控制模型和设计要点进行详细探究。
关键词:四旋翼无人机;姿态控制;控制器设计
2020年,在新冠肺炎疫情防控工作中,四旋翼无人机被广泛应用于人车引导、群体测温、空地宣传等多个方面,四旋翼无人机的机动性能比较好,可自动化执行任务。但是在四旋翼无人机的实际应用中也存在一些不足,包括动力性比较差、计算能力偏低、自主性有待提升等等。通过对四旋翼无人机控制系统进行分析,在姿态控制方面,要求对四旋翼的3个欧拉角进行控制,保证偏航角、俯仰角控制稳定性,由于四旋翼无人机姿态环的耦合效应比较强,姿态控制难度较大,由此可见,对四旋翼无人机姿态控制策略进行深入研究意义重大。
一、四旋翼无人机的飞行原理及模型
通过对四旋翼无人机的机身进行分析,其为“十”自缸体结构,四端均安装电动机,电动机中具有桨叶,可为飞行器提供充足动力,在螺旋桨控制中,可对电动机旋转状态进行调整,据此对螺旋桨的转矩进行有效控制。在飞行器运行状态控制方面,可在垂直状态对转子速度进行调整,如果转子速度所产生的扭矩能够被飞行器自身重力抵消,则飞行器即可处于悬停状态,而随着转子速度的不断增加,转子旋转所产生的扭矩也会不断增加,并大于飞行器自身重力,此时,飞行器将处于向上移动状态。反之,如果转子旋转过程中所产生的扭矩比较小,则飞行器可处于向下运行状态。四旋翼无人机中含有4个转子,如果其中某个转子的运转速度发生变化,则其他转子所产生的扭矩也会随之调整,同时飞行器可进行偏航运动[1]。
在四旋翼无人机运行原理研究中,可选择从动力学角度以及运动学角度进行分析,并创建坐标系。对于惯性坐标系和身体坐标系之间的角度关系,可采用滚动角度、偏航角度以及俯仰角度进行描述,要求满足以下条件:![]() 、
、![]() 、
、![]() 。另外,对于惯性坐标系和飞行器自身坐标系之间的关系,可采用欧拉角进行三次变换后确定。四旋翼无人机数学模型如下:
。另外,对于惯性坐标系和飞行器自身坐标系之间的关系,可采用欧拉角进行三次变换后确定。四旋翼无人机数学模型如下:
![]()
![]()
![]()
![]()
![]()
![]()
二、四旋翼无人机飞行姿态控制动力模型
在四旋翼无人机姿态控制技术研究中,首先需对四旋翼无人机机身作出假设,并对控制动力模型进行深入研究,假设条件如下:四旋翼无人机机身不会发生变形;对于四旋翼无人机,可作为形态均匀的刚体结构;四旋翼无人机中心和机身坐标系坐标点所在位置相同;将大地作为坐标系中的平面[2]。四旋翼无人机结构如图1。
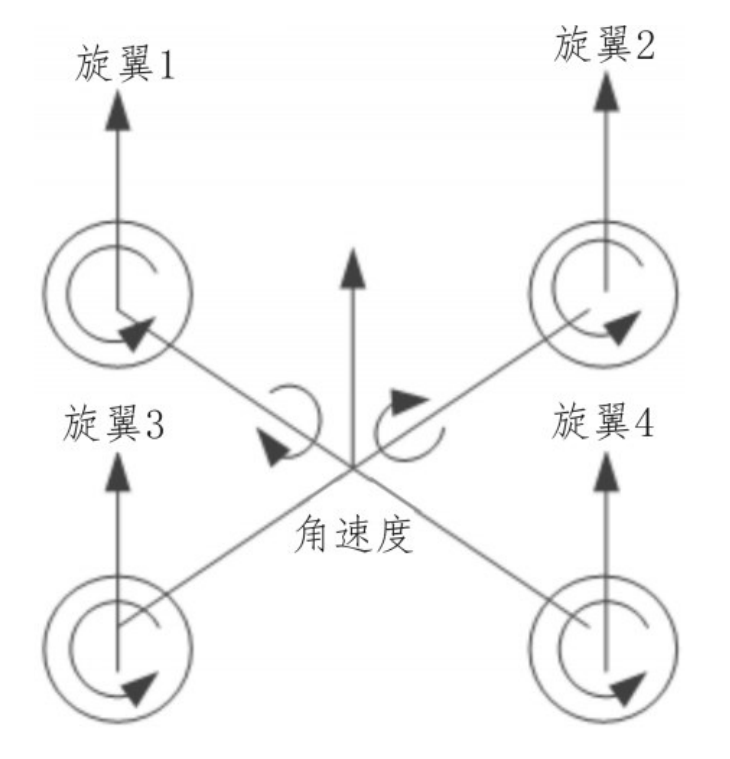
图1 四旋翼无人机结构
在四旋翼无人机姿态控制中,可采用动力学理论,如公式(1):
 (1)
(1)
在上述公式中,![]() 指的是四旋翼无人机飞行过程中的阻力系数,
指的是四旋翼无人机飞行过程中的阻力系数,![]() 指的是四旋翼无人机在不同方向飞行时所受到的运动气流,
指的是四旋翼无人机在不同方向飞行时所受到的运动气流,![]() 指的是无人机飞行距离,
指的是无人机飞行距离,![]() 指的是无人机飞行速度。在四旋翼无人机运行过程中,如果处于非直线飞行状态,则要求采用多个角速度进行分析,对于角速度,可采用公式(2)进行计算:
指的是无人机飞行速度。在四旋翼无人机运行过程中,如果处于非直线飞行状态,则要求采用多个角速度进行分析,对于角速度,可采用公式(2)进行计算:
 (2)
(2)
在上述公式中,![]() 、
、![]() 、
、![]() 分别指的是无人机在不同飞行姿态情况下的飞行角度,
分别指的是无人机在不同飞行姿态情况下的飞行角度,![]() 、
、![]() 、
、![]() 、
、![]() 、
、![]() 分别指的是无人机飞行状态下,由控制器所发出的姿态操作命令,
分别指的是无人机飞行状态下,由控制器所发出的姿态操作命令,![]() 、
、![]() 、
、![]() 分别指的是无人机不同飞行高度情况下的气流速度。对于四旋翼无人机飞行状态以及角度,可采用四旋翼无人机运行速度进行计算。
分别指的是无人机不同飞行高度情况下的气流速度。对于四旋翼无人机飞行状态以及角度,可采用四旋翼无人机运行速度进行计算。
为了能够对四旋翼无人机姿态变化过程中的扰动变量因素进行有效控制,对于复杂的非线性关系,可采用扰动动力学进行计算处理,当四旋翼无人机处于横向飞行和纵向飞行状态时,可将其姿态变化情况控制在整体变换范围内。在扰动原理的基础上,对于四旋翼无人机姿态控制状态变化量,可采用公式(3)描述:
![]() (3)
(3)
三、四旋翼无人机飞行姿态控制方式
为了保证四旋翼无人机处于稳定飞行状态,要求对四旋翼无人机的飞行姿态进行有效控制,对此,必须创建数据反馈体系,对飞行姿态控制数据进行线性化处理,保证控制结果准确性。另外,还应创建数据运算体系,对四旋翼无人机的飞行数据以及非线性动力数据进行计算,然后再传递至四旋翼无人机飞行控制器中,通过联合应用反馈系统,即可对四旋翼无人机的飞行姿态进行有效控制。
在数据反馈体系设计过程中采用反馈方式,即可实现无人机飞行数据线性化,由无人机控制器所发出的指令与无人机姿态控制信号之间为呈线性关系。在无人机飞行过程中,对于4个旋翼,均要求进行有效控制,由此可见,在控制器和无人机之间,参数传递具有一对多的特征,对此,还应创建非线性参数系统对状态变量进行运算分析,计算公式如下:
![]() (4)
(4)
在上述公式中,![]() 和
和![]() 分别指的是运算参数的状态变量,而
分别指的是运算参数的状态变量,而![]() 、
、![]() 、
、![]() 分别指的是无人机飞行控制器所传递的指令[3]。
分别指的是无人机飞行控制器所传递的指令[3]。
在反馈体系创建过程中,要求综合考虑无人机飞行角速度信息以及位移信息。在四旋翼无人机飞行过程中,在控制器发送指令后,即可确定四旋翼无人机的滚角速度,然后再对外输出。对于指令信号,可设定为
![]() ,而对于无人机跟踪指令所接收到的信号误差,可设定为
,而对于无人机跟踪指令所接收到的信号误差,可设定为![]() ,控制器对外的发送指令计算公式如下:
,控制器对外的发送指令计算公式如下:
![]() (5)
(5)
在四旋翼无人机飞行姿态控制中,如果跟踪指令接收信号准确性比较高,则可对四旋翼无人机飞行姿态进行有效控制,保证飞行过程稳定性。另外,在发送其他指令时,还应对其他参数系统中的数据和参数进行有效控制,对此,在反馈体系创建过程中,还应采用自律算法,对各类不确定因素进行有效控制,使得各项参数之间保持一定的线性关系:
![]() (6)
(6)
在上述公式中,![]() 指的是其他指令中的参数误差,在数据反馈体系中,控制器结构如图2。
指的是其他指令中的参数误差,在数据反馈体系中,控制器结构如图2。
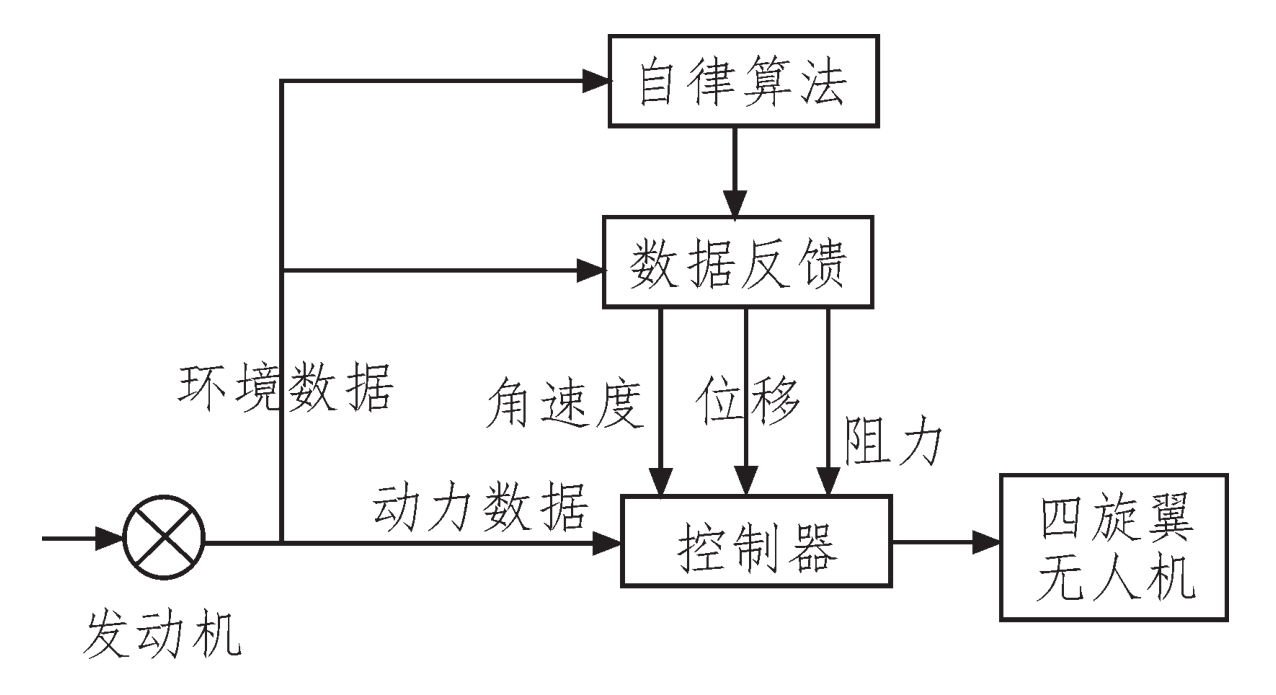
图2 控制器在数据反馈体系结构
总结:
综上所述,本文主要对四旋翼无人机姿态控制技术进行了详细探究。随着四旋翼无人机技术的不断创新,四旋翼无人机已被推广应用于多个领域,在无人机飞行过程中容易受到各类环境因素的影响,对此,在四旋翼无人机姿态控制中,可建立动力模型,同时创建反馈线性化体系以及数据运算体系,保证四旋翼无人机姿态控制的准确性。
参考文献
[1]沈杨杨,杨忠,张翔,等.一种倾转四旋翼无人机及其过渡段姿态控制[J].兵工自动化,2018,037(003):82-87.
[2]齐浩然,齐晓慧.风扰下的四旋翼无人机LADRC控制律设计[J].飞行力学,2018,36(002):21-25.
[3]张勇,陈增强,张兴会,等.四旋翼无人机系统PD-ADRC串级控制[J].系统工程与电子技术,2018,40(09):164-170.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



