南京熊猫汉达科技有限公司 江苏南京 210000
摘要:本研究的主要内容是机载卫星通信天线的跟踪误差。文章首选分析了双频段机载卫星通信天线的跟踪方式;其次,重点分析了指向跟踪误差。
关键词:机载卫星;通信天线;跟踪误差
前言:以设备为划分的标准可以将卫星的测控和通信两个系统划分成为两个分系统,其一为信道、其二为测角,在两个分系统中主体是信道,而基础则是测角。测角这一分系统的性能可以通过技术指标体现出来,技术指标包括天线的跟踪和指向两个精度。这两个精度需要满足实时捕获卫星的要求,但是来自测角分系统的误差可能会影响卫星,导致链路突然中断,难以进行正常的通信,鉴于此,在研制测角这一分系统的过程中,必须在器件选型的过程中严格把关,对任何可能出现误差的细节进行缜密地评估,并且,要在安装和调试设备的过程中标定误差。经过这一系列的操作可以让系统的误差显著降低,也可以使系统的两个精度提升,最终保证通信系统具备良好的跟踪性能。
机载卫星通信天线组成及跟踪方式
卫星通信天线的组成详见图1。
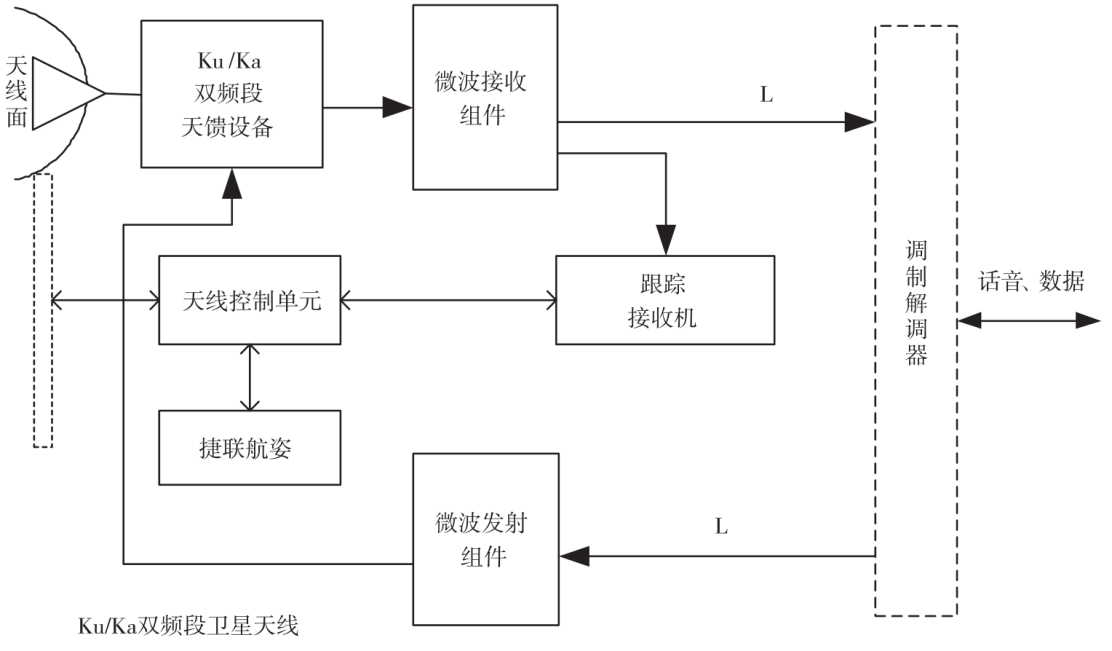
图1 卫星通信天线系统的组成示意图
1.1单脉冲自跟踪模式
卫星通信系统利用的单脉冲自跟踪在技术类别上可以划归雷达精密跟踪,该技术可以有效固定天线的波束,同时,该模式的优越性在于可以同一时间产生俯仰角误差和方位角误差信号和方向,而在这一过程中,该模式只需要一个来波信号[1]。在这一模式下,如果天线电轴与目标之间产生偏离,就会导致误差信号的产生。在这种情况下,可以归一化处理普通信号和存在误差的信号,将跟踪误差信号解调出来。该误差信号可以作为重要的依据,指导天伺服控制设备控制天线的电轴,并将电轴调整向误差零值的方向。在该模式中,获得角误差信号可以将不同波束的相对相位和振幅测量出来。此外,通过该模式获得的各项误差信号跟踪精度较高,可以在跟踪精度要求较高的系统中发挥更大的价值[2]。
1.2惯导指向程序跟踪模式
利用该模式需要充分借助惯导信息,利用空间坐标系完成转换的相关工作,将当前位置天线的指向角度实时解调计算出来,最后,利用电机这一设备,运转波束,并控制波束指向卫星[3]。该模式最大的优势在于,与其他的系统相比,天线跟踪系统并不复杂,在其他模式中必须进行的解调信号以及合成处理信号的过程在该模式中可以直接省去,在跟踪的过程中凭借载体本身的精度较高的惯导设备即可。但是,任何跟踪模式都有局限性,该模式也不例外,该模式过于依赖载体管道设备,并且,天线指向的精度将受到自身精度漂移的影响。
指向跟踪误差分析
2.1动态滞后误差
一般情况下,动态滞后误差可以划归为较大的误差。动态滞后误差即是飞机在自跟踪的状态下运行时,天线的电轴与目标之间的距离较大,通常情况下,电轴与目标之间会滞后一个角度[4]。造成这种动态滞后误差的原因与天线运动的加速分量存在密切的关系。为了减少这种动态滞后误差,可以提高采样率以及通过天线的伺服控制系统控制的频率。根据动态实测的数据以及工程设计的经验,在俯仰轴和天线方位上的动态滞后误差值大约在0.2°。在修正动态滞后误差的过程中,需要在全程进行动态滞后的修正工作,并且还需要必要的平滑处理和坐标转换[5]。
2.2天线罩瞄准线误差
载机在运动的过程中,天线与天线罩之间相对位置的变化直接受到卫星目标与天线之间相对变化的影响,这种变化会导致经过天线罩罩壁的天线辐射场的入射角产生较大的变化,此时,天线波束也会在电磁波的影响产生偏移,天线的跟踪误差由此产生[6]。分析这种误差产生的原因以及误差本身的原理,可以测量天线在不同状态指向的电性能,再经过一系列的分析和计算的过程,便可以得到具体的误差。在实际的测量之中,可以得到波束指向的偏差大致在0.15°左右,在修正补偿误差的过程中,可以采用分段二阶线性拟合[7]。
2.3机体变形误差
载机上,卫星通信天线与捷联航姿设备安装的具体位置不同,虽然有相关的规定,要求两种设备必须安装在载机的同一平面上,但是载机在执行任务飞行的过程中,机体不可避免地会产生弹性的形变,这种形变会直接导致处于同一平面上的两种设备出现扭动。在多次的飞行任务中确定,天线指向方向受水平面变动的影响在0.2°左右,修整这种误差可以利用伺服算法。
2.4隔离残差
机载的双频段卫星天线有一个固有的缺陷,即半功率波束较为狭窄,狭窄的波束宽度导致天线受干扰的影响更大,为此,需要保证伺服控制系统抗扰性较强。现阶段,为了提高系统的隔离度,一般会将陀螺安装在天线上。在试验之后得知,残差在0.19°,及时载机出现较大的颠簸和转弯都不会导致与目标中断跟踪。
2.5轴角编码器编码误差和零位标定误差
在测定天线的指向角度的过程中,需要利用到编码器。但是编码器这一设备本身就存在误差,因此天线不可呢完全准确地指向卫星,同时,编码器的这一误差与其性能之间存在密切的联系,难以根除,只能通过测定编码器的精度,保证编码器的误差保持在一定的区间内
[8]。当天线系统的自跟踪稳定之后,在标定天线各轴的角度时,便可以利用信标,此外,在装机之后,必须再度标定极化、方位以及俯仰轴的零位,在这一过程中可以利用同步卫星。在标定的过程中,误差自然可以减少。
2.6结构安装误差
在结构的设计层面,移动机载天线难度不低,不仅要求天线在结构上具备适当的刚度、较小的动态形变、较高的轴系精度,还要求天线结构的整体体积不能过大,重量不能过高。鉴于此,在安装的过程中必须将误差控制在合理的区间范围内,并尽可能趋近于零。在天线安装的过程中,方位俯仰轴相交不正,大盘没有保持水平,这些因素都会导致误差的产生。与上述的零位标定误差类似,该误差也可以通过标定减少。
结束语:通过本文的分析和研究可知,在机载卫星天线通信系统中,有多个组成部分以及单脉冲自跟踪和惯导指向程序跟踪模式两种主要的跟踪方式,同时,在分析指向跟踪误差的过程中可知,机载天线指向误差包括天线罩瞄准线误差、动态滞后误差、机体变形误差、隔离残差以及结构安装误差等,并给出了误差的实测数据。此外,提高系统的跟踪精度需要从跟踪接收机和伺服控制跟踪性能两方面入手。
参考文献:
[1]张鹏强, 茹斌. 机载卫星伺服天线指向基准算法研究[J]. 科学技术创新, 2019(14):76-78.
[2]李晓锋. 机载卫星通信天线稳定平台的实现[J]. 通讯世界, 2019, 026(011):96-97.
[3]张明军, 丁鹊鹊, 侯景华,等. 机载卫通天线载波相位误差影响分析及补偿[J]. 无线电工程, 2020(11).
[4]田捷力, 李麒, 邓军, 顾田航, & 顾新. 机载卫星通信天线跟踪误差分析. 通信技术, 54(3), 5.
[5]范强. 机载卫星天线自动跟踪系统控制技术研究[D]. 北京理工大学, 2016.
[6]刘永霞, 吴军军, & 袁楠. (2019). 一种新型uhf频段卫星通信天线的设计. 数字技术与应用, 37(03), 154-155.
[7]常兴华. (2019). 机载卫星通信天馈系统五性设计. 电子技术与软件工程, No.168(22), 42-43.
[8]吴硕才, 徐雷, 任清川, & 何思奇. (2018). 机载卫星双星天线馈源运动学分析与adama仿真. 自动化与仪表, 033(010), 83-86.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



