宣城职业技术学院 安徽 宣城 242000
摘要:为了解决小口径打磨的难题,多渠道查阅文献资料,提出了小口径打磨机械手设计方案,实验表明了其具有科学性、实用性。多功能小口径打磨机械手,还能提高在小口径打磨领域的打磨效率,减小因人工打磨对人体的伤害,降低企业的生产成本,采用了PC上位机编程和伺服系统控制打磨机的基准定位,对打磨系统优化具有很大参考意义,在市场应用方面具有很大推广价值。
关键词:小口径;机械手;上位机;伺服系统
1 引言
小口径打磨设备打磨就目前而言企业基本还是采用人工打磨,主要原因:市场上个别打磨设备都是单一型,而且价格很高,不能在企业推广。然后人工打磨由于其工作环境较为密闭,打磨过程会产生大量的打磨磨削屑给人体带来巨大安全隐患。所以通过大量企业调研发现需求是十分巨大,很多企业由于自身条件限制很希望机构或社会能够研制出通用性比较强的打磨设备。
2 方案设计
可调节小口径打磨机械手是以机械、电气、科学技术、计算机等具有领先成熟的跨学科技术为设计载体,根据被打磨的设备大小和高度,调节打磨设备,实现精细准确定位打磨。
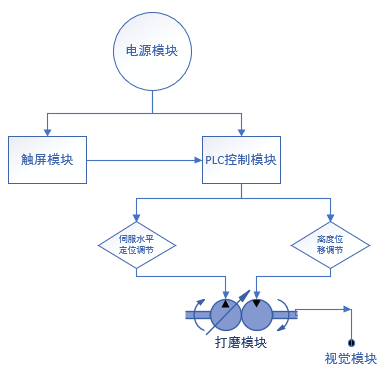
系统分为PLC控制模块、触屏显示模块、电源模块、打磨模块、视觉模块如下图所示。
打磨机械结构示意图
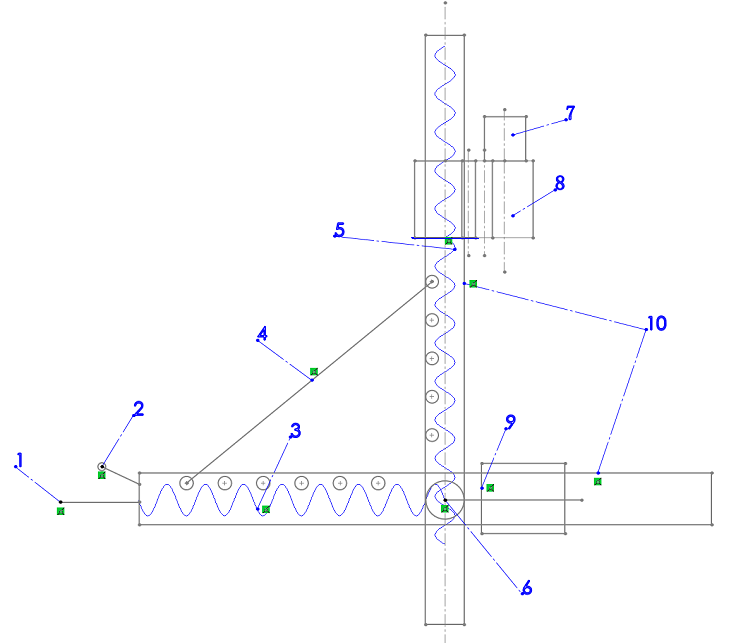
打磨机械结构示意图
1.打磨头2.可调节摄像头3.水平调节丝杠4.可调节固定架5.调节丝杠6.可旋转机构7.伺服电机1 8.啮合齿轮9.伺服电机2 10.固定架
2.1 PLC控制模块
伺服参数设置
参数 作用
P29004=1 为驱动器设置RS485地址
P29007=2 选择Modbus协议
P29008=1 选择Modbus控制源
P29009=6 设置传输波特率为9600
2.2触屏显示模块
通过管理系统和控制系统的2个子模块的有效配合,实现了分级管理,通过分配不同管理权限实现安全操作,对控制系统的位移实现实时显示达到精准定位。

2.3电源模块
电源主要有24V和220V 2种供电方式,其中触摸屏和PLC都是采用24V直流供电伺服系统采用220V供电,耦合隔离抗干扰较强。
2.4打磨模块
本模块是整个系统的核心难点,通过伺服运动将打磨端定位准确以后按照设定的速度和进给进行作业,通过与视觉系统的结合实现打磨效果实时掌控。
3 结语
该打磨装置机械手,具有体积不大,动作灵敏、操作方便、性能及优、成本较低等特点,能够在恶劣的环境工作,一定层度保障了人的安全,在可以预见的未来一定能发挥其应有的作用,产生一定的经济效益和社会效益。
[1]谭卢敏,冯新刚. 基于 PLC 的井下救援机械手的设计[J]. 煤矿机 械,2012,33(4):30-31.
[2]纪超,冯青春,袁挺,等.温室黄瓜采摘机器人系统研制及性能分析[J].机器人,2011,33( 6) : 726 - 730.
[3]沈灿钢. 一种SMART PLC控制的气动爬杆机器人的设计[J]. 2019,48(10):13-16.
[4]梁喜凤,彭 明,路 杰,秦 超. 基于自适应无迹卡尔曼滤波的采摘机械手视觉伺服控制方法[J]. 农业工程学报,2019,35(19): 230—237.
[5]张晓明. 三自由度移动机械手远程智能控制方法仿真[J]. 计
算机仿真,2017,34( 3) : 344 - 347.
[6]彭 艳,刘勇敢,杨 扬,杨 毅,刘 娜,孙 翊. 软体机械手爪在果蔬采摘中的应用研究进展[J]. 农业工程学报,2018,34(9):11-20.
[7]张盛,李艳聪,郑爽爽,等.浅析果蔬采摘机械人研究现
状[J].科技创新与应用,2015( 30) : 48 - 49.
[8]郭昊坤.基于PLC的气动爬杆机器人设计[J].新型工业化,2018,8(2):35-39.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



