陕西省电子技术研究所 陕西省西安市 710004
摘要:本文结合当前直流电源转换器系统应用过程中常见的问题,提出了一种针对性的模糊控制策略,借助该种模糊控制系统的控制器来对系统中的未知控制系数以及自适应率进行线上评估。本文所设计的控制器涉及到系统系统,它能够切实保障闭环系统内所有的信号都有界限,同时对目标信号的逼近误差能够控制在一个设定的区域范围内。最后,本文通过对数值进行仿真验证,确保该种方法是可行、有效的。
关键词:直流电源转换器;模糊控制;未知系数控制
一、引言
当前,直流降压电源转换器已经被广泛应用于高压直流输电以及直流电机驱动器当中,同时在混合动力电动汽车以及直接运行电动汽车等多个工业系统中均有广泛的应用。当前,我国有很多学者对直流电源转换器的电压控制相关问题做了分析和探究,并且指出,想要对电压进行控制,可以选择自适应控制、反步控制、滑模控制、有限时间控制以及模糊控制等几种办法。
在实际应用过程中,很多实际应用的系统在使用时存在着诸多不确定因素,这些因素对系统所控制的增益效果是不确定的。因此如何对控制增益不明确的系统进行有效控制是需要解决的问题。当前,很多学者都借助Nussbaum-type函数来进行问题的解决。但是借助该种类型的函数设计的控制器操作却非常复杂。通过查阅文献可知,通过模糊系统设计控制器,并且借助自适应律曲线来对未知常数进行估计,进而所设计的控制器能够确保在闭环系统下所有的信号都拥有明确的界限,同时能够对达到希望信号的有效跟踪。
该直流电源转换器的计算函数如下:
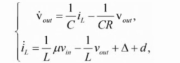
在其中,iL代表电路的感应电流,而V则代表系统中的输出电压,L代表系统中的电感,R代表的是负荷电阻,C代表的电容。通过该表达公式,可以确保设计出的模糊控制器能够对系统的信号及目标发出的信号进行有效的跟踪和对接。
二、结果讨论
2.1初次设计后试验结果
通过编程来对整个系统进行模糊跟踪控制,结果显示,初始程序在左边范围内能够实现模糊跟踪控制,但是模糊跟踪控制并不是预期的完全跟踪,而是和预期存在一定的误差,因此需要调节相关的参数来消除该误差,进而提升跟踪控制的准确性。
2.2改变跟踪信号
在该组实验中,通过将原有的正弦信号转变为锯齿波信号,然后对仿真结果进行分析,结果显示,模糊跟踪控制系统无法对输入信号进行继续的跟踪,因此调节程序参数会使得模糊跟踪控制器对输入信号进行进一步跟踪,对参数进行调整之后得到如下结果:
通过对程序的f值进行改变,进而改变整个系统的e和ec值,这样便能够借助模糊跟踪控制其来对锯齿波形进行有效跟踪,这其中锯齿波的幅度为0.45,而其周期为0.5,因此充分的体现出模糊跟踪控制器的应用优势。
2.3改变控制系统
在该组实验中,在原有信号不变的条件下,改变控制系统,通过重新调节是控制系统重新跟踪输入信号我们发现,通过模糊跟踪控制程序的应用,改变其中的参数能够有效得到预期的效果,该系统能够实现对输入的正弦信号的有效、准确跟踪。
三、数值仿真
考虑到本次研究所涉及的系统将其初始值认定在了3.2,感应电流认定为0.3,系统的整体参数认定为10、系统电容为20,通过系统的整体电感为0.3,而控制参数则包括K1、K2以及a1、a2等。通过对系统的不确定因素以及系统扰动进行排除,并且借助MATLAB软件来对其进行方针设计,得到如下数据图:

通过上图1可知,闭环系统的信号是存在较为明显的边界线的。
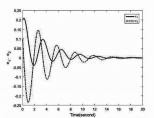

通过上图2及图3可知,所设定的跟踪误差在逐渐缩小并且趋近于一个较小的设定趋于范围内。

而通过上图4可知,控制器的范围是存在明显界限的。
四、结论
模糊控制时近年来随着智能计算机技术不断成熟而新成的一种智能控制办法,通过该种控制办法能够有效实现模糊跟踪控制,且该种控制方法的优越性非常明显。模糊控制的原理主要包括以下几个方面:第一,确定控制的观测量和控制量;第二,将系统的输入端和输出端具体量进行模糊化;第三,对模糊规则进行详细描述;第四,计算模糊关系;第五;进行模糊相关决策;第六,控制量的反模糊化计算。在本次研究中,通过对模糊控制的基本原理进行遵守,并在此基础上进行更进一步的设计,从而实现了对直流电源转换器的有效仿真跟踪。
在完成编程之后,程序本身便能够很好的实现跟踪控制功能,通过改变跟踪信号来对仿真结果进行分析,结果显示在跟踪信号转变了之后,只需要对相应的参数进行调整和改变,模糊跟踪控制同样能够很好的对输入信号进行准确跟踪。同时,通过将控制系统进行改变后来对仿真结果进行分析,结果显示改变了控制系统后同样能够实现对信号的有效跟踪。因此,只需要对模糊跟踪控制系统进行恰当的调整和改变,便能够实现对多重信号的有效跟踪。这充分的体现出了模糊跟踪控制的优越性,其发展前景十分良好。
五、结语
综合全文,本文对未知控制的增益系统的控制相关问题做了分析和研究,结果表明,在仅掌握系统运行状态的情况下,仅依靠模糊系统来对控制器及其相关的自适应率进行逼近便能够实现系统对希望信号的有效跟踪,同时确保闭环系统内所有的信号都存在界限。该种方法的操作流程较为简单,同时操作难度也不大。最后,通过数值仿真对所提出的控制方式进行验证,确保了结果的有效性和真实性。
参考文献:
[1]赵建伟,马啸飞,刘成祥,韩涛,房建华,王琨.煤矿巡检机器人设计及模糊控制研究[J].电子制作,2021(13):33-37+100.
[2]Yangang Yao,Jieqing Tan,Jian Wu. Event-Triggered Finite-Time Adaptive Fuzzy Tracking Control for Stochastic Nontriangular Structure Nonlinear Systems[J]. International Journal of Fuzzy Systems,2021(prepublish):
[3]秦树旺. 光电跟踪系统中模糊-动态高型控制技术研究[D].中国科学院大学(中国科学院光电技术研究所),2021.
[4]李宁.直流电源转换器系统的模糊跟踪控制[J].淮南师范学院学报,2020,22(05):134-136.
[5]张正华,叶诚,贺先锋.铁塔运营模式下的通用直流供电系统设计[J].通信电源技术,2017,34(06):78-79.
作者简介:杨策(1990-01-02),男,汉族,籍贯:河南省商丘市虞城县,当前职务:技术中心业务主管,当前职称:助理工程师,学历:本科,研究方向:A/D、D/A转换器,集成电路等电子芯片类

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



