新疆蓝天阳建设工程有限公司 乌鲁木齐, 830000
摘要:在道路工程逐渐增多的当下,测绘工作效率与精度不断提升,传统测绘工作面临的压力越来越大,为提升测绘水平,测绘团队有必要引入现代测绘技术。由此,文章就道路工程中三维激光扫描仪的应用展开分析,希望可促进道路工程建设发展。
关键词:三维激光扫描仪 道路工程 应用
前言:科学技术的发展,为行业发展提供充足技术支持,道路项目测绘中,新型测绘技术的应用,可有效弥补传统测绘技术缺点。就三维激光扫描技术而言,其不仅可以非接触快速扫描,还能方便测量工作开展,道路工程中,三维激光扫描仪的应用,还能减少外业操作,提升实际测量效率。
1 三维激光扫描技术
原理
和全站仪原理相同,三维激光扫描技术也包含测距、测角、定向三部分。结合激光测距原理,借助被测物体表面点位信息,可第一时间创建物体三维模型,然后对模型不同位置进行处理,而后获得实际效果图。
误差分析
三维激光扫描仪精度影响因素包含四种:仪器内误差,被测物体误差,外界环境影响与拼接误差。其中,仪器内误差,即在仪器内产生的误差。扫描仪发射信号,通过发射作用,会朝着相似路径传回来,该过程中由于反射路径不准确,会引起一定误差,最终对距离计算产生影响。扫描期间,容易出现不均匀旋转与微小抖动,这些操作也会对扫描角度产生影响,最终导致三维坐标误差。2)被测物体误差。因被测物表层粗糙性不同,引起的点位置不同。若目标发射面和扫描光束夹角很小,势必会对激光光斑产生影响,最终对三维坐标量测产生影响。3)外界环境影响。湿度出现较大变化,仪器内系统也会产生微小变化;风量较大时,扫描镜将出现微小抖动,该过程会对定位工作产生影响;空气质量较差时,仪器发射的激光信号传播期间,也会由于测量点位误差,对测量精度产生影响。4)点云拼接误差。外业数据采集期间,很容易导致测量误差。数据处理期间,点云拼接也常常会引起误差,因此目标匹配期间应及时提取目标。
2 道路工程中三维激光扫描仪的应用
2.1 数据采集
外业数据采集包含布设控制网,测量平面与高程控制网,建立标靶与三维坐标测量等。本文使用的扫描仪是美国 激光扫描仪,TX8天宝三维扫描仪可及时开展远距离扫描,测程约为340m,该过程可节约扫描需要消耗的人力与时间。一定测程范围,TX8扫描仪测量速度为1百万/秒激光点。工程道路选择某大学后山路段,由于三维激光扫描仪坐标系统独立,为转换地理坐标,方便后期应用,扫描前应做好控制网布设工作。工程测量期间选择以下7个控制点,建立闭合环型控制网,详细见下图1所示,然后测量其坐标,即可获得平面标靶三维坐标,便于后期精度评定。
激光扫描仪,TX8天宝三维扫描仪可及时开展远距离扫描,测程约为340m,该过程可节约扫描需要消耗的人力与时间。一定测程范围,TX8扫描仪测量速度为1百万/秒激光点。工程道路选择某大学后山路段,由于三维激光扫描仪坐标系统独立,为转换地理坐标,方便后期应用,扫描前应做好控制网布设工作。工程测量期间选择以下7个控制点,建立闭合环型控制网,详细见下图1所示,然后测量其坐标,即可获得平面标靶三维坐标,便于后期精度评定。
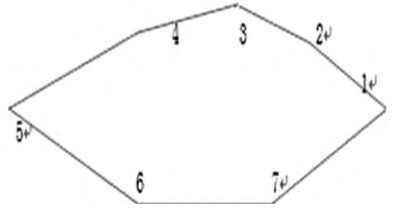
图1 控制网布设图
借助平面标靶标记道路特殊位置,借助全站仪对标靶坐标进行测量,随后开展激光扫描工作,设立三脚架与仪器,待开机后设置参数,最后进行激光扫描。该过程需要控制相连测站间距有一部分重叠范围,架设仪器可同时扫描公共区位置,结合扫描视角所处范围,可继续换站扫描。
2.2 数据处理
采集完数据后,应对数据进行处理。数据处理期间,本文主要使用南方CASS、CAD、天宝RealWorks等软件。处理期间包含做好点云拼接、除噪、坐标赋值等工作。
点云拼接:受扫描仪自身方面限制,不能一次采集完所有被测物体。因此,要设立不同测站,便于全方位扫描物体。这时会产生很多扫描数据,操作期间可将数据集中到相同坐标系内,如此即可获得完整全景图,该过程即点云数据拼接。应用球状目标与平面标靶,即可获得两标靶中心位置,然后将其拼接起来。目标配准中,包含目标配准与自动配准两种,利用电脑可自主识别目标物,然后做好拼接操作,针对不能自动提取的信息,则要手工标定位置。将测站当中的10个站拼接起来,即可获得所需的拼接效果图,详细见下图2所示,计算后即可获得点云间配准误差是 。
。
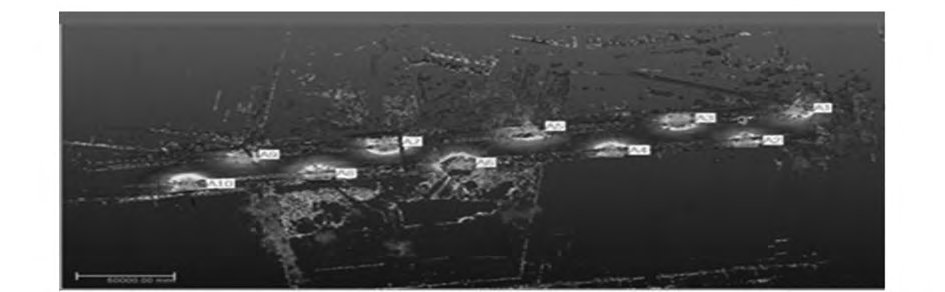
图2 点云拼接效果图
坐标赋值:拼接工作结束后,需要及时转换地理坐标系统,借助全站仪采集的平面三维坐标,标定了标靶中心位置,然后将三维坐标赋值标靶中心,即可将点云数据转变成所需的三维空间坐标。利用天宝RealWorks软件坐标输入即可实现X、Y坐标调换,最后得到所需坐标。接着删除非扫路点云数据,借助分隔功能删除数据,然后将道路数据保存下来;此外,还应借助自动点云分类,合理划分点云数据,具体可将其分成高植被、建筑物、地面、标杆等不同数据,然后再次删除或隐藏数据种类。
多变形处理:将数据导进操作软件内,然后做好点处理工作。例如常见的采样与着色等工作,即可获得分布均匀且较为平滑的数据,接着经过采样处理即可稀释点云数据,便于减少后期数据处理。点处理期间,应妥善开展封装操作。多边形期间,可使用简化、填充与裁剪等方式处理,借助裁剪工具裁剪,控制纵横断面图厚0.1mm,然后认真稀释数据,最后将数据以DXF格式保存。
提取道路特征:稀释完的数据可导进CAD中,借助样条曲线绘制道路平面图。然后应用直线、曲线等工具截取厚度为0.1mm薄片绘制横断面图,然后认真标记各部分尺寸,同时应用三维坐标信息对坡度进行计算,如此即可获得半幅道路横断面图。详细见下图3(a)所示。绘制道路纵断面图期间,可将asc格式转变成dat格式,然后导入CASS中,接着在显示区中选用点文件、点点号,最后借助DTM即可绘制出高等线,工程应用期间利用绘制断面图与高等线即可获得道路纵断面图。详细见下图3(b)所示。
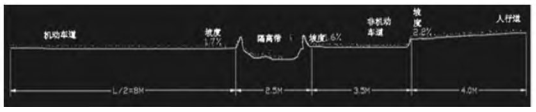
图3 (a)半幅道路横断面图
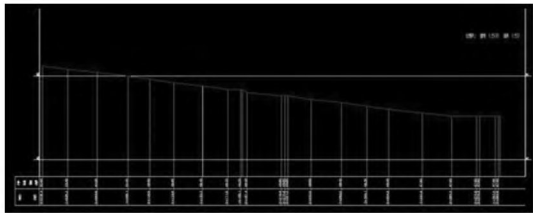
图3 (b)道路纵断面图
2.3 平面虚拟测量
通常点云数据组成多由三维信息点位构成,再者还应与拍摄真彩色影像相结合,这里,前者可保证表面模型数据,影像数据能保证角落与边缘信息准确。借助智能软件平台,利用点云数据与影像信息即可对模型纹理进行详细描述,例如,车站、雨水口与灯杆等位置。便于判定该位置信息,随后借助测量图示展现位置信息,然后标注相应比例尺与高程信息,即可获得所需地形图。
2.4 道路修建工程应用
(1)道路修建工程特点:道路修建期间,道路大多仍处在运营状态,因该过程车流量较大,车速较快,为了不影响交通,应确保测量期间,道路中车辆不出现断流。使用常规方法测量,一定要上路测量,操作人员应穿越公路,再者还应在路面设立很多测量高程点,该过程安全风险较大。通过分析上述风险因素与工作量,道路修建期间应妥善使用三维激光扫描仪开展测绘工作。
(2)测量方法:沿着公路外端设立紧急停车带测站,对范围内的目标进行全面扫描,借助软件开展数据拼接工作。这里应控制拼接精度为:拼接靶标期间应控制误差小于8mm,点云拼接误差小于10mm。点云处理完后,平面虚拟测量期间,可绘制道路边线与过街天桥等物标,还可采集大量平面与高程信息。然后使用传统测量法测量相同点位高程情况,借助三维激光扫描即可得到成果相比,确保误差大小符合实际规范要求。
结语:道路测绘中,将三维激光扫描仪技术与之相结合,可为道路工程测绘工作带来较大帮助。三维激光扫描仪技术的应用,可有效弥补传统技术漏洞,提升操作灵活性。不管在速度方面,还是在数据准确度方面,都实现了新的突破。通过整理数据颗粒度,可有效减少物力与人力投放,在任意场所开展数据整合。随着该项技术的推广,其会促进道路工程建设不断向前。
参考文献:
[1] 习晓环,骆社周, 王方建,等.地面三维激光扫描系 统现状及发展评述[J].地理空间信息,2012(6):13-15.
[2] 李雄. 生态建筑设计原理及设计方法研究 [J]. 山西建筑,2015, 41(14) : 21-22.
[3] 周霄, 倪怡玲. 生态建筑设计原理及设计方法探究 [J].低碳世界, 2014(19):22-23.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



