陕煤集团神木红柳林矿业有限公司 719300
摘要
掘进工作面是煤矿生产中设备多、环境恶劣、工作复杂的区域,连采机作为掘进工作面的龙头设备,其实现智能远程控制需要解决连采机的自动控制、定位定姿定向、煤岩分界辅助识别等问题。为推进掘进工作面无人作业,实现传统煤矿的智能化转型升级,本文提出连采机远程智能化控制方案,利用惯性导航、激光导引跟踪、多传感器融合、5G无线通信等关键技术,达到快速安全掘进目标,可实现连采机视频监控、远程控制、自动截割、人工干预相结合的生产模式。
关键词:机器人化作业;5G智能连采机;无人化开采;远程监控
前言
5G技术具有高速率(峰值传输速率达10Gbit/s)、低延时(端到端时延达毫秒级)、高系统容量和高运行速度等特点。本文通过5G无线通信网络将连采机相关数据高速、可靠地传输至工作面集控中心;工作面集控中心远程监控连采机,实现"一键启动、智能掘进、视频监视、人工干预"的功能。
1 连续连采机掘进技术现状
连续连采机结合锚杆钻孔、履带行走支 架、梭式小车、多功能叉车,可形成快速的掘进工艺线。美国、德国和英国等国的综采连续开采,技术领先,大部分机械设备已达到全遥控,我国连续连采机的研究开发起步较晚。连续连采机虽然可以通过装药锚杆钻机实现掘进机的同步作业,但不能在顶板条件恶劣的矿井中使用,限制了其适用范围。
基于多传感器信息融合技术辅助识别煤岩分界,以便连采机自动调高;通过5G无线通信网络将连采机相关数据高速、可靠地传输至工作面集控中心;工作面集控中心远程监控连采机,实现"一键启动、智能掘进、视频监视、人工干预"的功能。
2.1 5G技术
5G核心网采用虚拟化架构,利用IT虚拟化技术降低运维难度,采用SDN/NFV虚拟化架构实现网元/网络和基础设施的管理网元内部组件化,根据需要对内部组件进行编排,构成完整的网络。灵活实现系统网元的动态扩缩容、自愈等功能,提高系统的可靠性和易操作性。
2.2 运动控制技术
控制系统主要实现的连采机运动控制功能包括:
①确保单刀前进/后退时按照规定的基线方向走直线;
②连采机从左帮到右帮的调机功能;
③扫帮时保证巷道宽度。在单刀进刀时,以实时获取的连采机航向角信息为输入量,采用PID算法控制2条履带的行走电流,确保一旦发生航向角偏移,能及时纠正。
2.3 截割控制技术
调机控制采用"N×V型"调机法,主要是通过连采机的旋转、退机、前进等组合操作,实现连采机平移。截割控制结合实际截割工艺,采用13步截割法。基于采高、振动、电流、视频等多传感器检测数据,利用合理算法辅助煤岩分界识别,进行连采机自动调高控制。
3连采机远程智能化控制界面
3.1主界面
状态显示栏中的控制方式代表连采机处于网控、遥控还是本控状态。网络控制状态是指连续采煤机处于中控室的控制状态。此时,连续采煤机可以执行自动割煤程序,但可以手动干预;遥控状态指遥控操作;这种控制状态表示可以利用连续采煤机驾驶室的操作箱进行控制。
导航状态显示条上方显示了连续采矿机的方向角、俯仰角、横摇角等信息。航向角以仪表板形式显示。当指针位于中间时,表示连续采煤机的航向角与指定的航向角方向一致。左偏表示连续采掘机当前巷道掘进方向相对于巷道基线左偏,右偏表示连续采掘机当前巷道掘进方向相对于巷道基线右偏。底部的XY值是连续采矿机中心点的坐标信息。在分切辊/刮板/平稳启动状态显示栏中,当提升/下降辊/刮板/平稳启动时,运动方向箭头显示在相应位置。同时,切割滚筒上下的数据表示当前切割滚筒上、下截齿相对底板的高度信息。操作按钮条用于惯性导航机的开关和从各个方面进行切换。
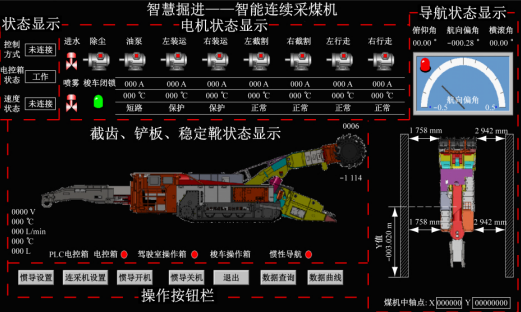
图2 主界面
3.2惯导设置界面
预设参数显示条主要用于提前输入导航参数,其中经度、纬度、高度和航向角是最重要的。地质测量提供了当前工作地点的经纬度信息(误差在1km以内),掘进角为巷道基线方向的夹角,也由地质测量提供。一次输入后,无需重复输入即可自动记忆。车道号表示双车道情况下车道是左车道还是右车道。初始XYZ表示激光制导装置在隧道中的坐标信息。如果在多次测量后出现累积误差,将使用XYZ校正存储。XYZ校正存储表示修改后的激光制导设备的坐标。工作状态显示栏显示导航系统中所有设备的工作状态。惯性导航状态表示惯性导航系统当前的工作状态。如果在上电后刚刚发送惯性导航启动命令,则惯性导航状态将从初始化到对准到对准完成。只有对准完成,惯性导航才能正常工作。
导航结果显示栏给出了系统中各个关键位置的信息状态。经度、纬度、高度表示矿机当前的位置信息(与预设状态栏的输入信息一致);中心点XYZ为采矿机姿态测量装置的坐标;参考点XYZ表示激光制导装置的坐标,航向角、俯仰角、横摇角表示采矿机的姿态信息;XYZ在A到H点表示采煤机其他特征点的坐标信息,包括割鼓两端的位置坐标信息、采煤机后方左右两个点的位置坐标信息、采煤机中心点的位置坐标信息。界面切换按钮可以将惯性导航设置界面切换到主界面和所连接的矿机设置界面。当多次测量累积误差较大时,将校正后的激光制导装置的坐标信息输入到预先设定的参数设置条中,点击校正按钮,即可完成误差校正。
3.3连采机设置
连续采煤机设置界面主要用于设置采煤机的具体参数和连续采煤机的整机调整。截煤距离:指每次在一个完整的程序中设定的截煤距离;单刀进给是指每次循环进给的深度;循环次数为达到目标截煤距离所需的完整循环次数;上高度设置库和下高度设置库分别表示切割滚筒运动的最高和最低值,对应上、下高度值(采煤机轨道底面为0);调整机采用移动机器的最大距离、巷道的左X坐标和巷道的右X坐标,其中“N×V型”调整机方法中,移动机器的最大距离表示煤机后向距离。巷道左X坐标和右X坐标分别表示巷道左右两侧的坐标参数。导航角校正是对安装在连接的采矿机上的姿态测量装置的安装偏差角进行校正。
结论
综上所述,连续采煤机的自动控制功能是智能掘进的基础。本文基于5G技术,主要采用传感器和自动控制箱来实现对连续开采机械机构的检测和控制,并采用多种不同类型的摄像机进行多角度视频监控,增加了系统的安全性。
参考文献
[1] 代冀阳, 赵玉坤, 应进,等. 一种基于5G通信的智能远程电能监控系统及监控方法:, CN111427286A[P]. 2020.
[2] 邹林琳. 5G低功耗大连接场景下的能效优化研究[D]. 北京邮电大学, 2019.
[3] 陈颖. 一种基于5G网络的危险设备远程组网系统方法:, CN110839183A[P]. 2020.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



