摘要:太阳能无人机在军民两个方面具有极高的潜在价值,堪比准卫星,可进行多种侦察任务,许多国家也将太阳能无人机的发展作为长期目标。所以我们的研究目标是以滑翔机为基础研究一款中小型太阳能无人机,相比于大型太阳能无人机,制作成本更低,性能相似,更加适合于日常生活,太阳能无人机相比传统无人机的飞行时长将大幅度提升,如地质勘探中的探测无人机,边疆巡检中的侦察无人机。
关键词:太阳能 无人机 侦察
前言
太阳能无人机的发展可以追溯到上个实际60年代,也出现了许许多多太阳能无人机,如美国的“全球观察者”加拿大的“大鸭掌”和英国的“微风”以及“西风”。太阳能无人机可应用的领域有很多,绝大多数以侦察为主,如大气研究、环境检测、交通管制,天气预报等。
太阳能无人机具有其他无人机所不能比拟的优势,不在受制于电源携带量,太阳能无人机无论是用在军事上还是民生上都具有广泛的用武之地,但太阳能无人机受制于光伏板的发电效率,这就导致需要大量的光伏板才能保证电源供给,从一定程度上限制了太阳能的最小体积。中小型太阳能飞机的投入使用,将在一定程度上引领无人机走向变革。
2气动外形研究
2.1机身研究
机身蒙版采用2mm轻木,用来维持机身的气动外形,内部有5×5的松木条作为桁条,蒙板和桁条一起承受由于弯矩引起的拉-压正应力。承受由剪切力和扭矩作用而引起的剪切应力。
机身分成三段,前段连接电机,中段与机翼相连,后段装配尾翼。三段机身采用插销结构连接,方便拆卸组装和飞机运输。在集中应力的部分再添加航空层板进行加强,保证了机身强度足够。在机身后端增加一个金字塔型尾椎到整流、提高稳定性的作用。
2.2 主机翼的结构设计
主机翼翼型选择FX 60-126,通过软件分析相比如图1,在-5~到+15度之间, FX 60-126的升阻比也较高,升阻比最高在6度左右,随后开始缓慢下降。同时考虑到翼型的上表面弧度变化不宜过大,适合铺设太阳能片。主机翼材料采用巴沙轻木,椴木层板等作为基础结构,巴沙轻木具有密度小,易加工等特点,能有效减轻飞机的重量。机身机翼连接处采用航空层板作为链接件,航空层板普通椴木层板强度高,表面光滑等特点,适合用于机身机翼连接处等应力集中部位。用碳纤为方管加强主梁,碳纤维片加强尾缘。碳纤维是一种新型的复合材料,比强度比钢大,密度比铝小,耐腐蚀,用碳纤维与树脂制成的复合材料广泛用于飞机上。


图1 FX 60-126 图2 绿色和金黄色几何体为铝合金件
主梁和前缘的上下蒙板形成一个封闭的D型盒结构。桁条用来支撑太阳能电池片,使柔性太阳能片贴合机翼表面,维持机翼的剖面形状。机翼分三段,采用7075铝合金做螺栓链接结构,方便快拆和组装。铝合金结构如图2。
2.3 尾翼外形研究
阳能无人机平尾采用对称翼naca0008,弦长300mm,安装角0°,翼展1120mm;垂尾采用对称翼naca0010,弦长300mm,高度500mm。
尾容量的设计值,由表1给出,通过对比,可以将太阳能无人机归类为一种ISR (Intelligence, Sureillance & Reconnaissance) 无人机和电动滑翔机之间。这种无人机一般垂尾尾容量CVT为0.014,平尾尾容量CHT为0.34。
表格1 各种飞机的尾容量参考表
飞机类型 | 平尾Cm | 垂尾 CVT |
滑翔机 | 0.53 | 0.022 |
ISR | 0.34 | 0.014 |
通用飞机(单发) | 0.7 | 0.032 |
通用飞机(双发) | 0.76 | 0.06 |
客机(双发) | 0.91 | 0.09 |
垂直尾翼的面积和它离开机翼的距离,是决定垂尾对飞机的航向稳定性作用效果的两个关键因数。这两个参数的取值由尾容量确定,可以由下式计算:
![]() [1]
[1]
其中,b是机翼展长3.9m,Sref是机翼参考面积(一般为机翼投影面积)为2.016m2,LVT是飞机初步估计的重心位置和垂尾的四分之一气动弦位置之间的距离1.335m,SVT是垂尾侧视外露面积0.15m2。将数据代入公式,可得CVT为0.024。
根据平尾的尾容量值,由下式计算得到平尾面积:
![]() [2]
[2]
其中,机翼弦长c初步估计为0.54m;LHT是飞机初步估计的重心位置和平尾的四分之一气动弦位置之间的距离1.335m, 则平尾弦长300mm,展长1120mm,面积SHT计算得0.336m2。将数据代入公式,可得CHT为0.394。
通过对比滑翔机和ISR的尾容量数值,得出设计的垂尾容量0.024和平尾容量0.394
2.4 稳定性分析
在XFLR5软件对飞机整体气动分析中,将雷诺数设置在120000到40000之间,马赫数为0.03,空气密度为1.29kg/m3,高度为500m,飞行攻角在±15°,整机附重2.5kg,重心位置为距机翼前缘180mm,计算得出飞机的雷诺数为36000。软件中的建模,图3为飞机整体在XFLR5中计算俯仰力矩。
对无人机进行俯仰力矩分析,机身Z轴方向的重心为机翼最高的位置往下180mm,带上载荷前后,Z轴重心计算在在20mm内变化,俯仰力矩基本变化不大。可以得出,载重前后,对飞机的俯仰力矩影响在设计符合范围内。从左上角的图可以看出,随着飞机速度迎角增大,负升力也以一次函数稳定增大。

图3 整机在XFLR5软件中分析2
为了保证飞机在较小速度(7m/s)时有足够的升力,机翼安装角为+2°。机翼升力初步计算,FX60-126翼型在+2°安装角时,升阻比为77,设起飞速度为7m/s,空气密度为1.29kg/m3,机翼水平投影面积为2.106m2,升力系数为0.729。
![]() [3]
[3]
把数据带入升力公式(1)得出升力为48.52N,换算为4.9kg,除去飞机重量3.5kg,飞机还可载重1.4kg的装备起飞,满足设计需求。
3太阳能板发电测试
3.1 太阳能发电效率测试
太阳能发电功率测试,首先测试60片太阳能片(品牌为sunpower,效率为23%)的发电功率,在光照为70000Lux(±500)光强,太阳能片水平摆放,发电平均功率为75W。
第二次太阳能发电功率测试。测试安装在机翼上110片太阳能片的发电功率,在光照为70000Lux(±500)光强,温度27摄氏度,机翼水平摆放,实测发电最大功率为137.2W,最大拉力为1.315kg,飞机总重不超过3.5kg,可得飞机的推重比为0.376,满足飞机巡航动力要求。下图为机翼上的110片太阳能功率测试前准备,电机固定在15kg的实木架子上。
下表格2为110片太阳能功率测试记录(风速计固定在距电机安装座150mm处)
表格2 动力测试表
电流(A) | 电压(V) | 功率(W) | 拉力(Kg) | 风速(m/s) |
0.06 | 31.87 | 1.91 | 0.036 | 0.6 |
0.65 | 32.28 | 20.98 | 0.31 | 3.7 |
1.32 | 28.38 | 37.46 | 0.56 | 6.2 |
2.32 | 24.81 | 57.56 | 0.9 | 7.3 |
3.6 | 29.83 | 107.39 | 1.1 | 7.5 |
5.54 | 20.95 | 116.06 | 1.15 | 8.4 |
4.6 | 24.35 | 112.01 | 1.2 | 8.6 |
4.98 | 27.55 | 137.20 | 1.3 | 9.0 |
测试结果分析,第一,动力测试基本符合设计要求。第二,使用超轻蒙皮覆盖在太阳能发电片上,对总体发电几乎没有影响。第三,当太阳能发电达到饱和值时,继续增高输入信号的PWM值,电机动力反而下降。
3.2 太阳能电源系统地面续航测试
将飞机太阳能发电系统通过二极管输入电调,电池通过二极管输入电调,保证了在太阳能电源系统和电池不会相互充放电。安装好发电系统之后,进行动力续航测试,调好遥控的pwm值,保持电机推力在1kg,持续30分钟。,实际数据是如表格3。
表格3 续航测试
初始光强 | 7000lux | 30分钟后光强 | 7400lux |
温度 | 24摄氏度 | 环境风速 | 小于1米每秒 |
初始太阳能总电压 | 35.0v | 结束时太阳能总电压 | 36.1v |
初始电池电压 | 25.2v | 结束时电池电压 | 24.8v |
测试结束时,电池电压仅下降0.2v,说明在阳光充足时,飞机可以只靠太阳能发电就能持续飞行。
侦察系统安装与调试
侦察系统将采用R2TECK DVL-1080P无线高清数字图传和运动相机结合。运动相机固定在二轴云台上,跟踪所需要拍摄的位置。R2TECK图传拥有接近3公里的超长传输距离和1080p的视频输出相当于一颗简化版的移动地侦察卫星。·
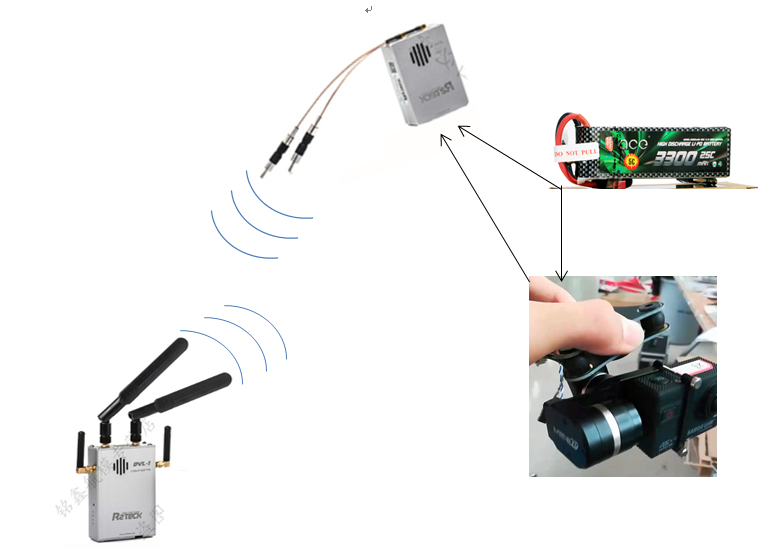
图4
如图4 侦察设备连接示意图运动相机和云台一起安装在机腹位置,既可以获得最大的拍摄角度,又靠近飞机重心,云台的运动对飞机的影响降低到最小。运动相机一边记录信息,一边将拍摄到的图像通过HDMI线传输到R2TECK图传,R2TECK图传固定在机头位置,既可以通过引进发动机的气流对其散热降温,又可将两根天线固定在机头两边,远离pix飞控的蓝牙天线,减低干扰。
5、结束语
该太阳能无人机将更适用于侦察活动,太阳能无人机携带运动相机通过云台进行稳定,将侦察的侦察的实时数据通过数字图传天空端回传到地面站,不用担心相机受到天气的影响,在运动相机和云台的双重稳定下,保证了回传的图像清晰度。
传统无人机受限于电源携带量,而太阳能无人机不受这方面的影响。在光照强度充足的情况下,飞行时长在5个小时以上 将大幅度减少电池的更换,但连续使用发动机最大状态可能会使发动机出现超温超转现 象引起电机和其他动力组件稳定性下降[4],成为飞行时长的主要影响因素。
搭载其他设备还可将功能进一步拓展,如地质勘探,投送救援物资等。
作者简介:江鸿浩,男,福建漳州人,从事飞行器研究
项目支撑:2020年大学生创新创业项目国家级立项“警用太阳能搜救无人机——凤凰一号”
参考文献
1[?] 丁曼曼. 基于单晶工程制备钙钛矿太阳能电池性能的研究[D].华中科技大学,2019.硕士学位论文
2[?] 刘洋,王晶,周明.无人机光电侦察航线自动规划方法[J].兵器装备工程学报,2021,42(01):94-97+121.
3[?] 安盼龙,赵瑞娟,睢坚.单晶硅太阳能电池伏安特性研究[J].大学物理实验,2020,33(05):71-73
4[?] 尹文强,孙健,高空长航时无人机实用升限试飞技术研究[A] 中国飞行试验研究院,2020,31(02):25-30
5

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网 琼ICP备2021005105号



