河南省康复辅具技术中心
摘要:踝关节假肢是助力机器人、康复机器人领域的一个重要研究方向。这种类别的假肢通过提供额外动力的方式,使其具有类似人体踝关节的步态行走特性,能够走出自然顺畅的步伐,更加逼真的实现正常人体行走的整个过程,使穿戴者能够更好的适应外界环境,具有非常重要的意义。
关键词:动力踝关节假肢;研究;发展
人体行走是一个最基本的运动过程,但其重要性是不言而喻的,对人体来说这个运动过程是一个非常简单的过程,但从机器的角度去看,这个过程需要肌肉、关节、韧带以及神经系统之间的相互配合,借助地面的反作用力和摩擦力使身体前移,是一个非常复杂的过程。很多下腿截肢患者只能依靠传统义肢生活,只起到支撑和外观上相对舒适的作用,完全失去了踝关节的基本功能[1]。相比而言,带有动力源的踝关节假肢可以从功能上满足截肢患者,在他们行走时,假肢本身具有动力源,可以提供驱动力,使整个踝关节的运动步态和力学性能与正常的生物踝关节相似,因为其本身具有动力源,所以可以减少人体的能量消耗,不会像传统假肢那样让患者感觉行走步态与身体不协调而且还费力,这种具有动力源的踝关节假肢可以称之为动力踝关节假肢或者主动式踝关节假肢。它不仅保留了传统假肢的支撑和外观等优点,也将踝关节运动特性变化和步态阻抗控制运用其中,使其能够满足适用人群的身体运动需求。
1.人体踝关节的原理
人体的正常行走过程,是由脚踝关节和多块骨骼以及肌肉、韧带等多结构共同作用相互辅助的结果,从而完成整个的步态行走姿态的过程[2]。人体真实的足部关节构成和其所能完成的运动范围由下面两图所示,脚踝关节主要是由关节头以及关节窝两部分组成,关节头包括距骨的上关节面和两侧的关节面,其关节面的形状为滑车状,利于运动减少摩擦,关节窝主要是由胫骨的底部关节面、腓骨体外踝关节面以及内踝关节面共同围绕而组成。其基本的运动方式主要有跖屈和背屈两种,俗称分别为绷脚和勾脚,正常人体踝关节的跖屈运动可以达到140°左右,背屈运动可以达到70°左右。
踝关节和脚足部内部的一系列的关节,再加上和大腿膝关节之间的配合,形成了具有3个自由度的运动机构,从而可以使人体足部能够适应各种不同的复杂路况,完成稳定行走过程[3]。足部与踝关节之间虽然有着是相互协同作用的关系,但是足部是明显有区别于脚踝关节的,当人体在一定环境下需要的时候,人体足部可以变成一个可以看作是单一的刚体,刚度很大且不易发生改变。同样在有需要的情况下,而足部也可以变得十分灵活,特别具有柔顺性,刚度可以随时转变,足部可以随时根据需要在刚性和柔性之间进行任意的状态切换,生物力学非常复杂,这同时也是在踝关节假肢设计中需要考虑的重点和难点。
2.动力踝关节假肢设计
2.1串联弹性执行器原理
串联弹性执行器是一种具有柔顺驱动特点的力源输出装置,其最主要的特点就是采用电机或者其他形式动力源作为驱动力源,在其经过减速机构或者直接串联一个弹性装置,然后再作用于受力物体,这也是它的原理。
理想的驱动控制器是不存在的,在其实际的运动过程中包括了输出阻抗、静态摩擦和控制带宽等等状况参数。串联弹性驱动系统具有比较小的摩擦和输出阻抗,从而可以来完成相对精确的力的控制。输出阻抗是一个驱动器的性能的重要考虑对象,同时它也是衡量其是否可行的重要标准。对于一个线性弹簧来说,阻抗就是其弹性形变系数,反应了形变量与所输出力之间的关系。而对于驱动器的控制,主要也就是对其输出阻抗的控制。
2.2踝关节假肢机械结构
根据正常人体在水平面上行走的生物踝关节力学表现特性,和对串联弹性驱动器的原理分析,对踝关节假肢的设计可以归纳为需要主要满足下列的需求。所设计的踝关节假肢模型能够达到与人体生物踝关节相近的自由度、运动范围、关节转动速率、输出扭矩、驱动功率。动力踝关节假肢模型的驱动器能够具有一定类似生物关节在未知环境的被动适应行为,具有较强的环境适应性,在未知环境中具有一定抵抗外界冲击能力[4]。而且其模型的输出阻抗可以被进行有效的控制调节,可以能够尽量调节输出阻抗与生物关节类似。另外,关节驱动器能够产生力矩对足部负载实现像人体步态周期中的摆动相调节。
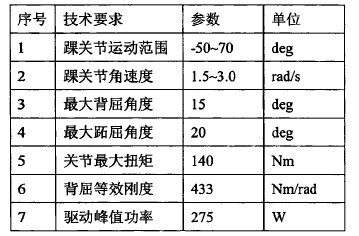
总之此类关节驱动器的结构具有一定的柔顺性,可以适应一定的冲击力,具备一定抗外界扰动能力。同时,关节驱动器的外形尺寸还需要能够与人体足部相匹配,并且具有比较高的功率质量比。为了能够满足上述设计要求,踝关节假肢模型的技术要求如下表所示:
表1 技术要求
根据以上设计技术要求,踝关节驱动器的设计就需要采用前面所描述的串联弹性驱动系统结构,因为现有的驱动电机较难达到人体生物踝关节类似的功率密度,如果直接选择能够达到要求的大功率电机,通常势必有质量大、尺寸大的特点,又不符合其外形尺寸与人体足部相匹配这一点设计要求,而且常规电机有较大的机械阻抗,耐以承受足部接触地面时的冲击,所以需要采用前面章节中所分析的串联弹性驱动系统,使整个机械系统符合驱动要求,且具有耐冲击和柔顺性。本文在前有工作基础上进行改进,并进行进一步的理论分析和控制研究。
2.3串联弹簧设计
根据串联弹性系统原理,针对改进后的踝关节假肢模型的设计,主要是串联弹簧与足趾连接方式,足趾的结构,以及并联弹簧的结构设计,其设计目的还是串联弹簧和并联弹簧的刚度设计,使整个系统的结构运动特性能符合类似人体踝关节运动阻抗曲线。对于串联弹簧和并联弹簧的设计,需要结合模型设计和动力学仿真结合,反复多次的试验和优化,才能得到合适的结构及刚度[5]。
串联弹簧在整个步态运动过程中都发挥了作用,特别是在开始跖屈阶段,脚踝单独由其作用,此时足趾还没有与并联弹簧接触。其后半部分与足趾固定连接限制其自由度,其刚度主要由环形结构产生。
3.面临的问题及展望
综上所述,目前国内外关于动力踝关节假肢的研究取得一定成果,但总体处于初级阶段,依然面临一定的问题与挑战。首先,假肢驱动器普遍存在重量体积大、输出力矩小、柔顺性不够、能量利用效率不够高等不足,很难表现出类似正常肢体的运动特性,因此近年很多科研工作者逐渐转向研究主被动混合假肢,协调主被动控制的优点以满足人体需求。其次,假肢控制方法中,有限状态机控制应用最为广泛、成熟,但不能进行良好反馈,仿生性不足;轨迹跟踪控制不能很好适应路况变化;直接意志控制基于仿生信号,也就是肌电信号,穿戴者在行走中具有较高自主性,肌电信号与深度学习结合在上肢假肢有了一定应用,在踝关节假肢中虽没有相关研究但将成为未来热点与趋势;在控制方法中还应注重多种路况下的行走步态模式、步速步宽范围内的自动调整。最后,纯生物力学信号控制与仿生信号控制各有特点,都有不能避免的不足。可以考虑将两类信号联系起来,取长补短,实现共融提高控制效果与精度。
参考文献
[1]肖文涛. 动力大腿假肢楼梯步态规划与控制[D].哈尔滨工业大学,2020.
[2]张燕,姜恺宁,郭俊超,宋亮.动力踝关节假肢的研究现状与发展分析[J].中国康复理论与实践,2019,25(12):1389-1394.
[3]吕荣安. 主被动踝关节假肢与控制方法试验研究[D].华东理工大学,2018.
[4]李光伟. 智能下假肢结构设计仿真及控制系统研究[D].哈尔滨理工大学,2018.
[5]冉洋冰,曹恒,朱钧.动力踝关节假肢设计与仿真[J].制造业自动化,2014,36(11):40-42+64.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



