中车唐山公司技术研究中心
摘要本文主要是对面向中小城市轨道交通及景区观光线路研发的微轨车辆进行动力学分析,通过在多体动力学SIMPACK中建立微轨车辆动力性学模型,分析车辆运行平稳性、曲线通过性、紧急制动等性能。仿真结果表明:车辆运行平稳性满足GB/T5599-1985规定,曲线通过性能较好,没有出现轮胎连续减载脱离路面的现象,车辆在转弯时和转弯后保持稳定,满足车辆25km/h-0km/h紧急制动时制动距离小于15m的要求。
前言:
悬挂式单轨交通具有结构轻盈、景观好、占地少、投资省、建设快、线路适应性强等优点[1]。近年来,中车唐山公司展开了微型悬挂式单轨的研制,单个车辆可满足4人乘坐,主要面向中小城市轨道交通及景区观光线路,以下将微型悬挂式单轨车辆命名为“微轨”。
目前,悬挂式单轨车辆研究主要是仿真分析,线路实验测试较少。谢毅等[2]以悬挂式单轨车辆的车体和摇枕为研究对象,采用 UM 软件建立了一个60自由度车-线系统动力学模型,分析了车辆横向偏角在不同减振装置参数下的变化特性。蒋咏志等[3]以微轨车辆为研究对象,通过建立一个20自由度的微轨动力学模型,分析了车辆在过曲线和侧风作用下的动力学响应。李忠继等[4]采用UM软件建立了60自由度车辆系统动力学模型,利用等效线性化和非线性研究了空轨列车的系统稳定性。冯尊委等[5]采用多体动力学软件 UM 建立悬挂式单轨列车车辆动力学模型,模型中考虑了各减振器、弹簧、止档的非线性特性,以及橡胶轮胎-轨道的非线性作用特性,对单轨列车的关键悬挂参数进行了研究。
本文利用多体动力学软件SIMPACK建立微轨车辆动力学模型,对车辆的动力学性能进行分析,对微轨车辆设计有一定的借鉴意义。
1 微轨车辆结构及动力学模型
1.1 微轨车辆结构
微轨车辆由车体、转向架、车体与转向架连接装置组成,如图1.1所示。转向架是由构架、走行轮、导向轮、转向轮、电机、制动装置、转向装置等组成。整个转向架在箱型梁内运行,走行轮、导向轮和转向轮均为实心橡胶轮,走行轮垂直放置在箱型梁轨面上,传递车轮垂向力。导向轮在箱型梁侧面上运行,从而实现导向的功能,转向轮只有在过道岔时与道岔梁侧面接触,从而实现转向的功能。车体与转向架连接装置包括转向架中心吊杆、悬架、锥形橡胶等。
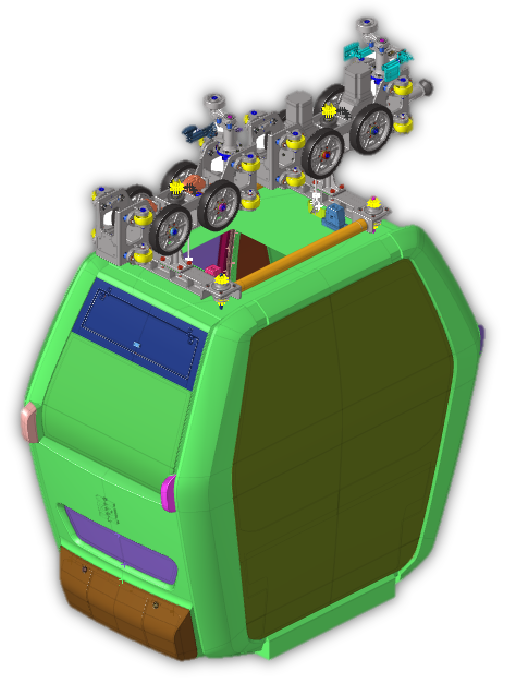
图1.1 微轨车辆组成
1.2 微轨车辆动力学模型
利用多体动力学软件SIMPACK建立微轨动力学模型,如图1.2所示。微轨车辆包括一个车体及两个转向架,结合整个模型,对影响较小的零部件做简化处理,建立构架、吊杆、悬架、车体等刚体,忽略弹性变形的影响,刚体自由度如表1所示。
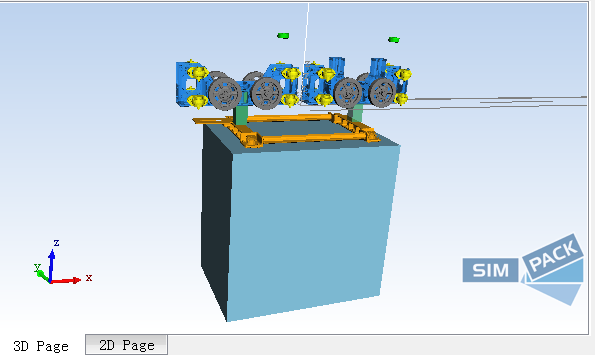
图1.2 微轨车辆动力学模型
表1.1 刚体自由度
刚体 | 数目 | 纵向 | 横向 | 垂向 | 侧滚 | 点头 | 摇头 |
轮对 | 4 | | | | | √ | |
构架 | 2 | √ | √ | √ | √ | √ | √ |
吊杆 | 4 | | | | | | |
悬架 | 1 | √ | √ | √ | √ | √ | √ |
车体 | 1 | √ | √ | √ | √ | √ | √ |
1.3 线路激扰
在微轨系统中,采用箱型梁内部走行轨面与传统轨道不同,而与公路路面更为接近,从公路的角度上,与轨道不平顺相对应的是路面不平度,以路面凹凸不平的程度来表征路面平整性的质量,选取线路激励采用A级公路谱,并进行一定的缩放,如下图所示,横坐标轨道纵向长度,纵坐标为不平顺幅值:
图1.3 走行轮垂向激励
导向轮路面激励主要包括导向轮左轮激励、右轮激励,对应箱型梁侧壁的凹凸不平度,进行一定的缩放,如下图2.14所示,横坐标侧壁纵向长度,纵坐标为不平顺幅值。
图1.4导向轮横向激励
2.1微轨车辆模态分析
将动力学模型线性化以后,求解特征根可得到出车辆的各种振型。计算车辆在AW0和AW3载重条件下的车体和转向架各阶振型的频率和阻尼比,包括车体振型和转向架阵型,如表2.1所示。
模态 | AW0 | AW3 | ||
频率 | 阻尼比 | 频率 | 阻尼比 | |
车体侧滚 | 1.03 | 0.23 | 0.79 | 0.17 |
点头 | 2.01 | 0.35 | 1.88 | 0.32 |
沉浮 | 3.35 | 0.43 | 2.40 | 0.34 |
摇头 | 4.80 | 0.66 | 4.80 | 0.66 |
车体纵向 | 18.22 | 0.53 | 17.45 | 0.51 |
转向架纵向 | 22.61 | 0.25 | 22.61 | 0.25 |
2.2 车辆运行平稳性
(1)根据UIC518,轻轨车辆车体振动加速度应满足以下条件:
车体横向加速度最大值 Acy ≤2.5m/s2
车体垂向加速度最大值 Acz ≤2.5m/s2
车体横向加速度均方根 sAcy ≤0.5m/s2
车体垂向加速度均方根 sAcz ≤0.75m/s2
(2)运行平稳性的评价按照GB5599-85进行。具体评价指标如下:加速度测点选在距车体中心1m车体地板面上。平稳性指标计算公式为:
式中:![]() ----平稳性指标;
----平稳性指标;
![]() -----振动加速度(g);
-----振动加速度(g);
![]() ------振动频率(Hz);
------振动频率(Hz);
![]() ---频率修正系数,见表3.1。
---频率修正系数,见表3.1。
表2.2 平稳性指标频域加权值
垂 直 振 动 | 横 向 振 动 | ||
0.5~5.9 Hz | | 0.5~5.4 Hz | |
5.9~20 Hz | | 5.4~26 Hz | |
> 20 Hz | | > 26 Hz | |
表2.3 平稳性指标评定等级
平稳性等级 | 评 定 | 平稳性指标 |
1级 | 优 | W<2.5 |
2级 | 良好 | 2.5 |
3级 | 合格 | 2.75 |
(3)车辆运行平稳性仿真结果
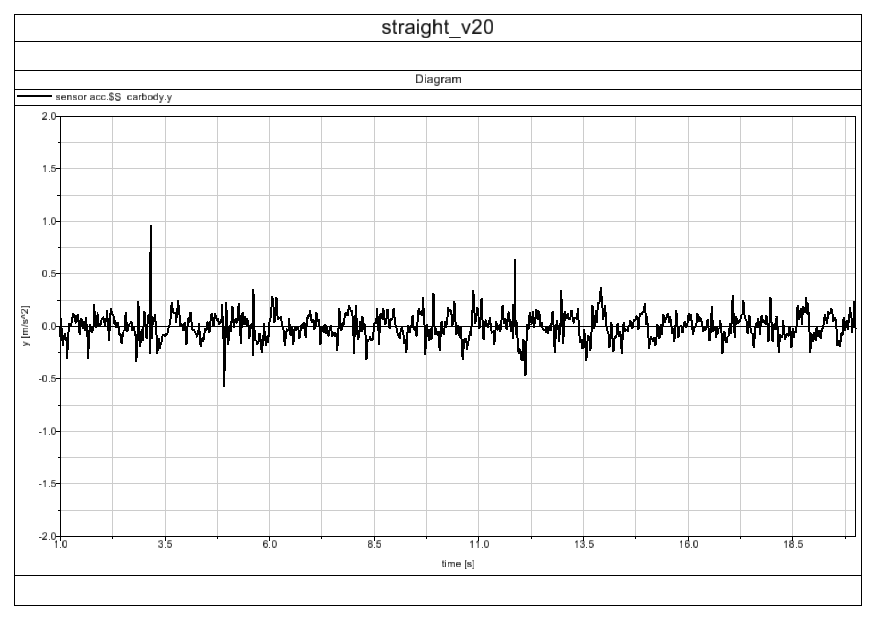
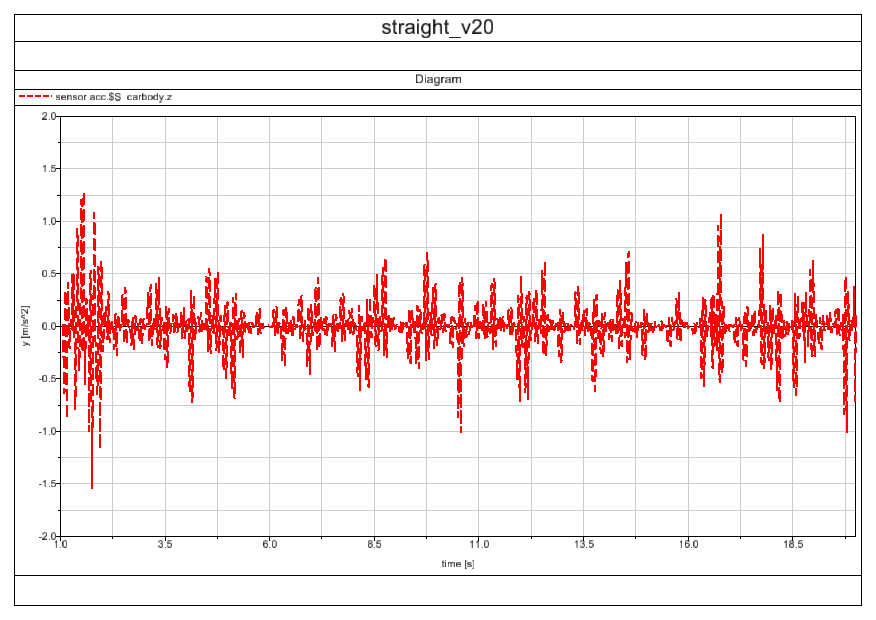
图2.1 车体横向加速度 图2.2 车体垂向加速度
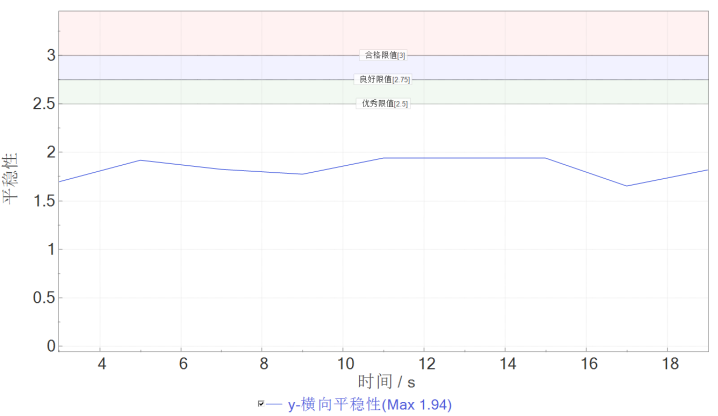
图2.3 车体横向Sperling指标 图2.4车体垂向Sperling指标
由图2.1-2.4可知,车体的最大横向加速度0.964m/s2、垂向加速度1.551m/s2小于UIC518规定客车横向、垂向加速度均小于2.5m/s2速的要求,车体横向Sperling指标最大值为1.94、垂向Sperling指标最大值为2.24,均满足GB/T5599-1985规定Sperling小于2.5的要求,运行平稳。
2.3 车辆曲线通过性
车辆以16km/h的速度通过曲线半径为12m曲线,图2.5为曲线线路图,图2.6、2.7分别为车辆运动状态图,图3.16-3.25为走行轮、导向轮和吊杆橡胶受力图。
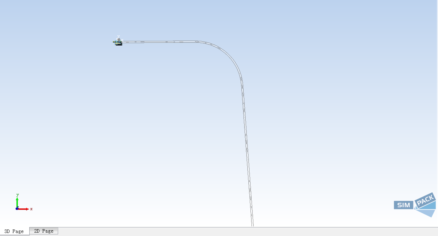
图2.5 R12m曲线工况线路图
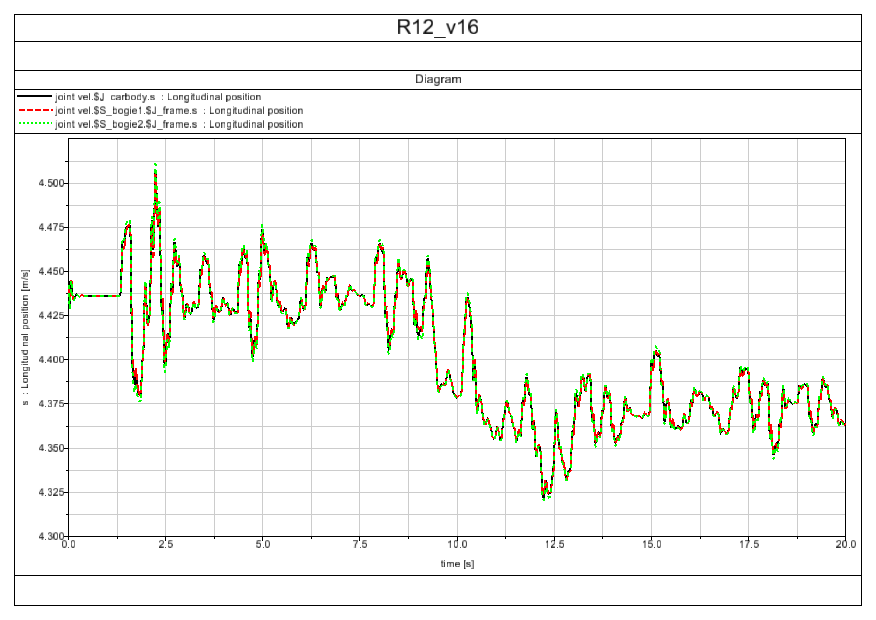
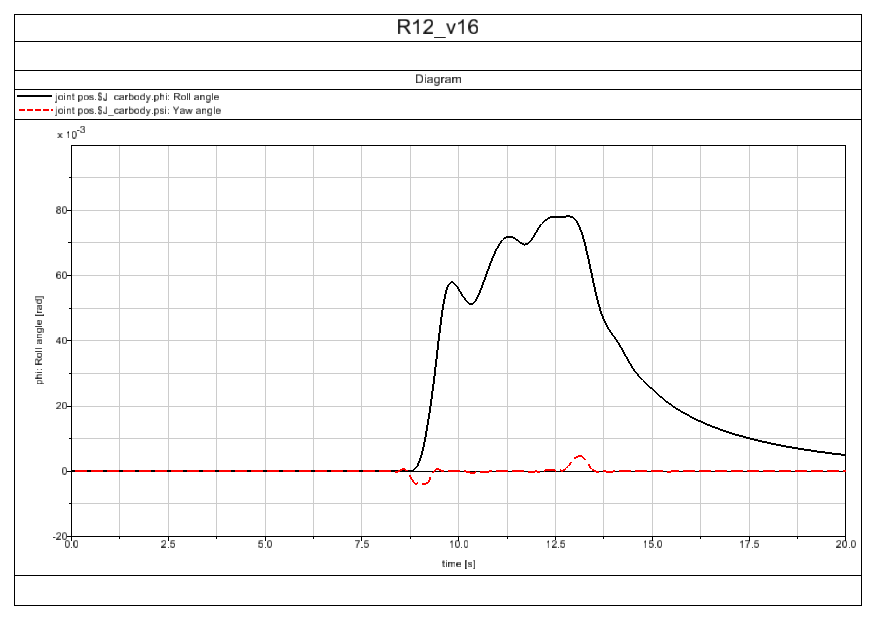
图2.6 激扰工况下车体、构架速度 图2.7 激扰工况下车体侧滚角、摇头角
从图2.6、2.7中可以看出,车辆先通过直线,再通过半径为12米的曲线。Error: Reference source not found从结果可以看出,车辆在退出曲线后是稳定的,车体最大侧滚角度为0.078rad(3.9°),车体最大摇头角度为0.005rad(0.25°),垂向激扰对车体的侧滚和摇头角基本没影响。车辆在转弯时和转弯后保持稳定。
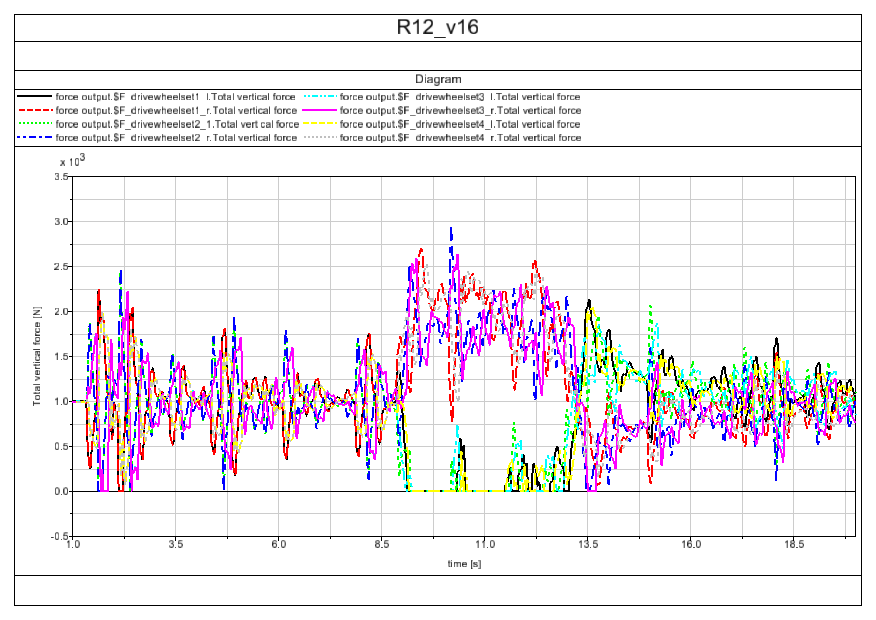
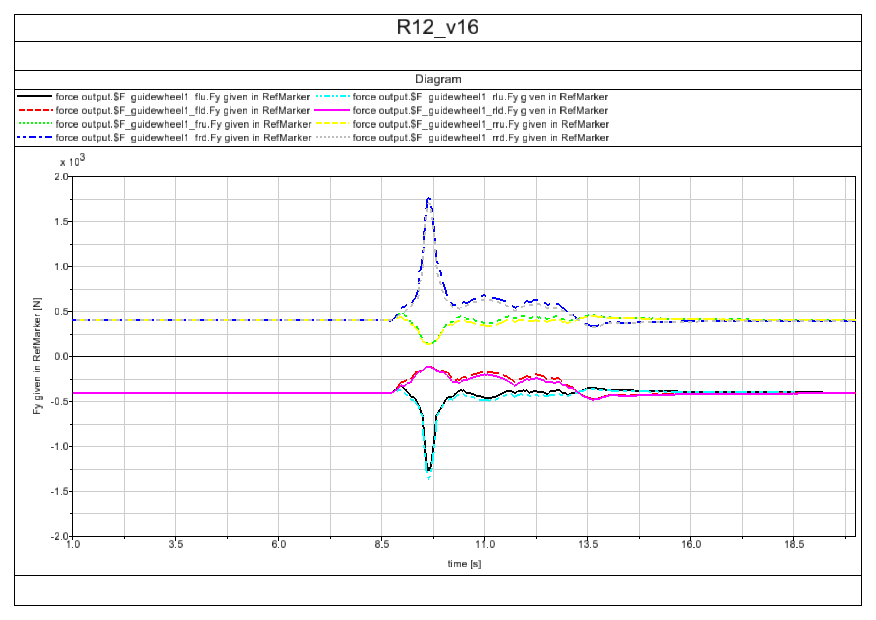
图2.8 走行轮垂向力 图2.9动力走行部导向轮横向力
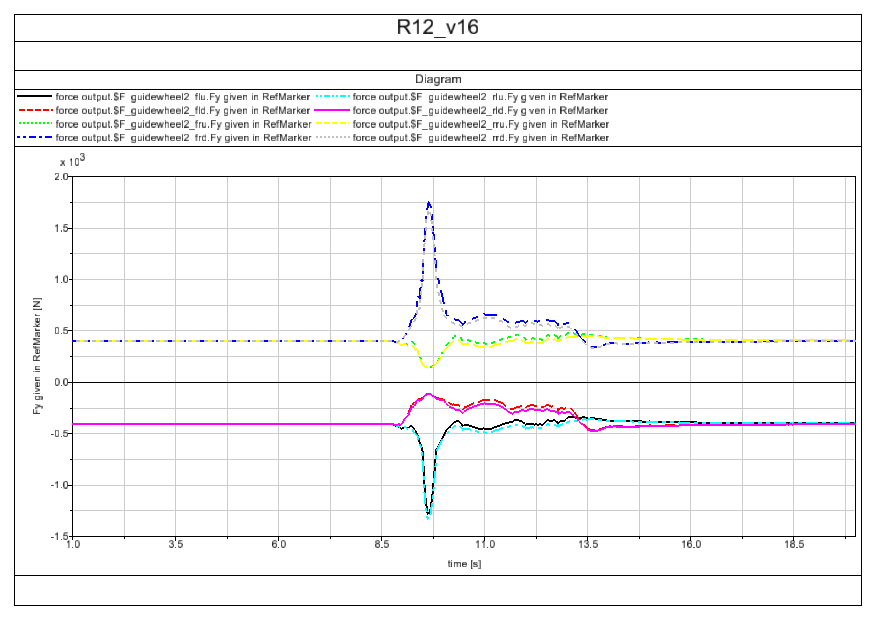
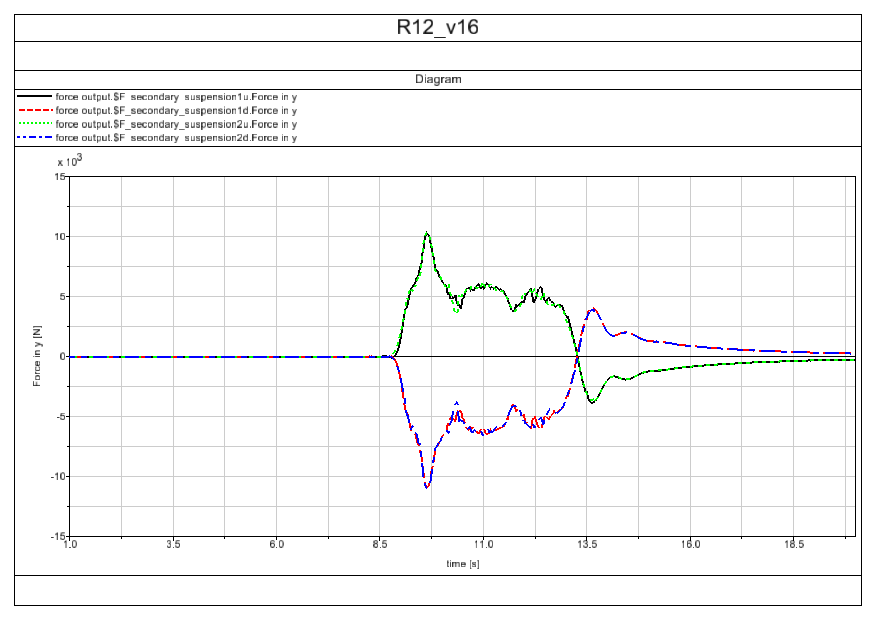
图2.10 非动力走行部导向轮横向力 图2.11 吊杆橡胶横向力
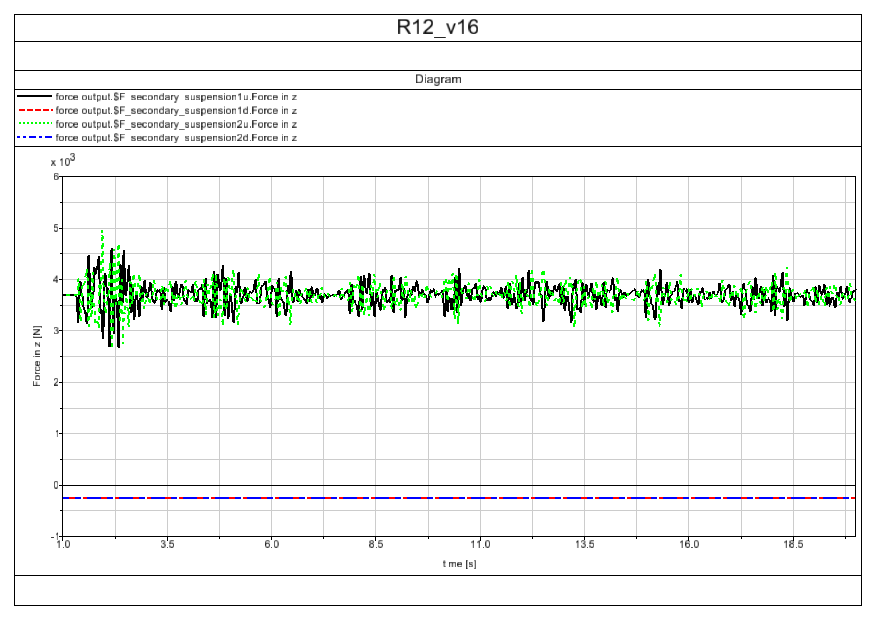
图2.12 激扰工况下吊杆橡胶垂向力
表2.4 R12m曲线通过性能指标
指标 | 曲线工况下最大力(kN) | |||
走行轮垂向力 | 一位轴左轮 | 一位轴右轮 | 二位轴左轮 | 二位轴右轮 |
2246.08 | 2703.8 | 2461.23 | 2933.34 | |
三位轴左轮 | 三位轴右轮 | 四位轴左轮 | 四位轴右轮 | |
2229.44 | 2640.92 | 2047.53 | 2533.18 | |
导向轮横向力 | 前左上导向轮 | 前左下导向轮 | 前右上导向轮 | 前右下导向轮 |
-1263.82 | -110.83 | 147.86 | 1754.6 | |
后左上导向轮 | 后左下导向轮 | 后右上导向轮 | 后右下导向轮 | |
-1354.91 | -141.34 | 142.38 | 1693.68 | |
前左上导向轮 | 前左下导向轮 | 前右上导向轮 | 前右下导向轮) | |
-1276.78 | -117.6 | 148.73 | 1752.27 | |
后左上导向轮 | 后左下导向轮 | 后右上导向轮 | 后右下导向轮 | |
-1319.2 | -121.84 | 140.28 | 1670.65 | |
吊杆横向力 | 吊杆1上橡胶 | 吊杆1下橡胶 | 吊杆2上橡胶 | 吊杆2下橡胶 |
10345.2 | -10957 | 10334.2 | -10962.9 | |
吊杆垂向力 | 吊杆1上橡胶 | 吊杆1下橡胶 | 吊杆2上橡胶 | 吊杆2下橡胶 |
4576.62 | -245.22 | 4966.35 | -245.16 | |
由上述分析可得,微轨车辆曲线通过性能较好,没有出现轮胎连续减载脱离路面的现象,吊杆橡胶提供较大的径向力使车辆驶出曲线后较快回正。车辆在转弯时和转弯后保持稳定。
本小节主要分析紧急制动工况下的制动性能,分别计算车辆从25km/h到0km/h的制动,将制动力矩140.25Nm施加在非动力走行部车轴下车辆的运行速度和制动距离,判断制动距离满足小于15m的要求。
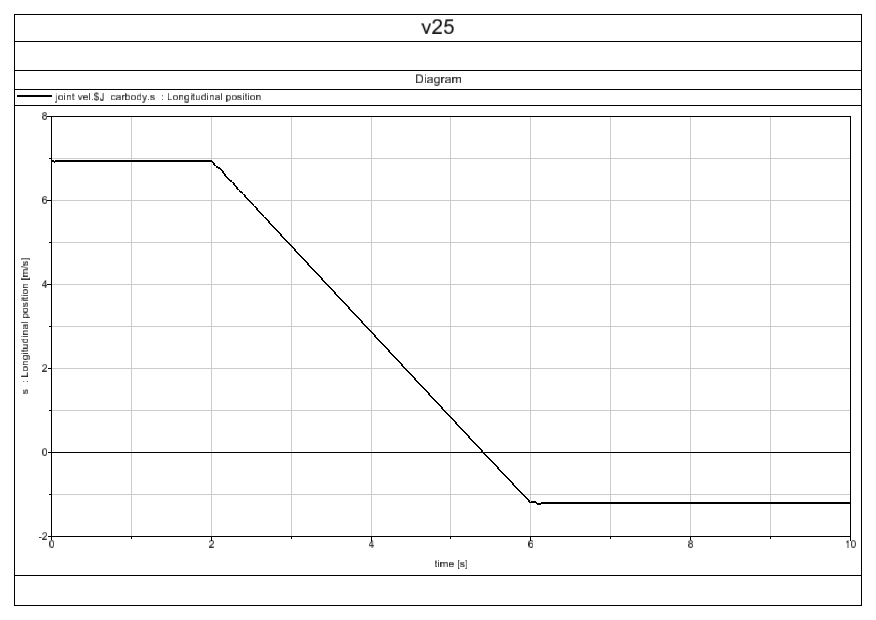
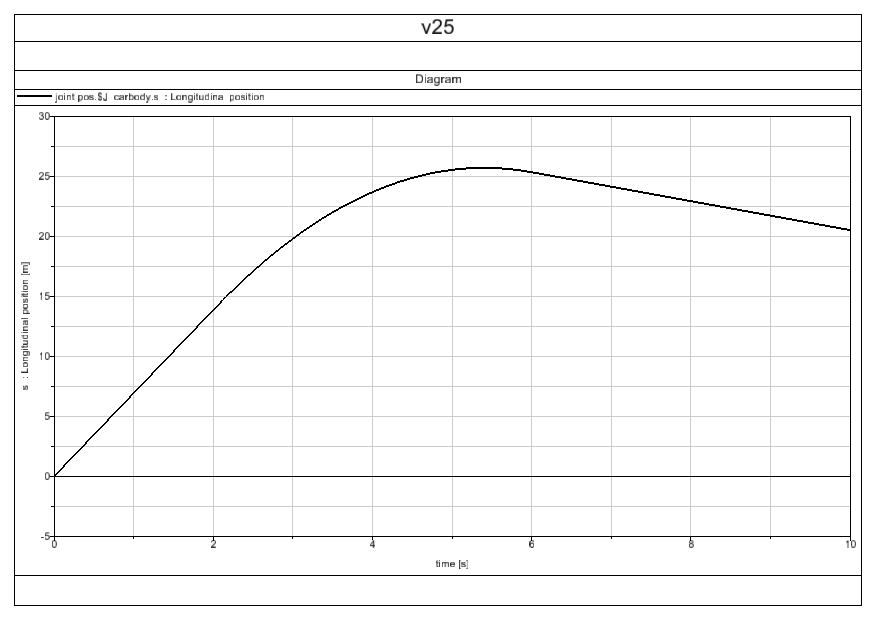
图2.13 制动工况下车辆速度 图2.14 制动工况下车辆运行距离
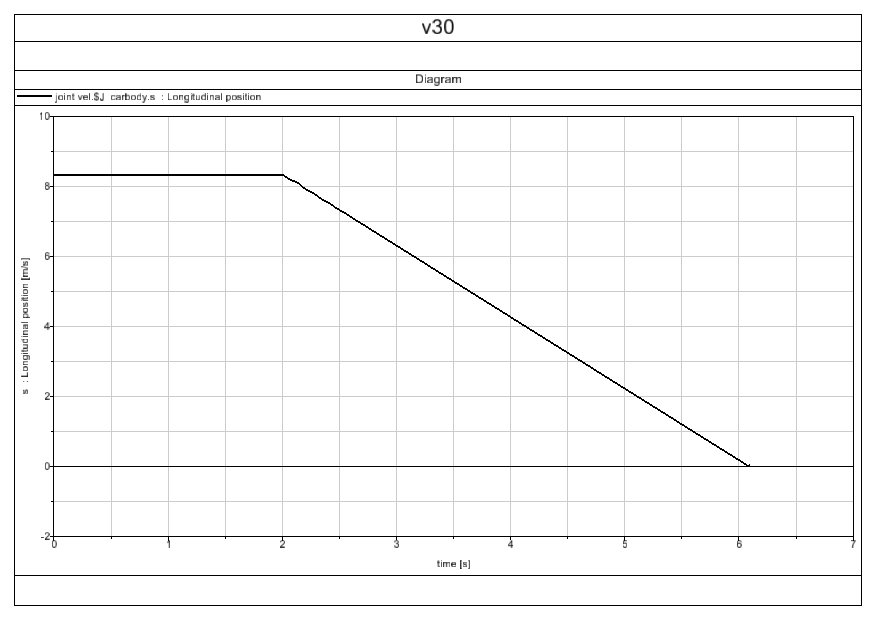
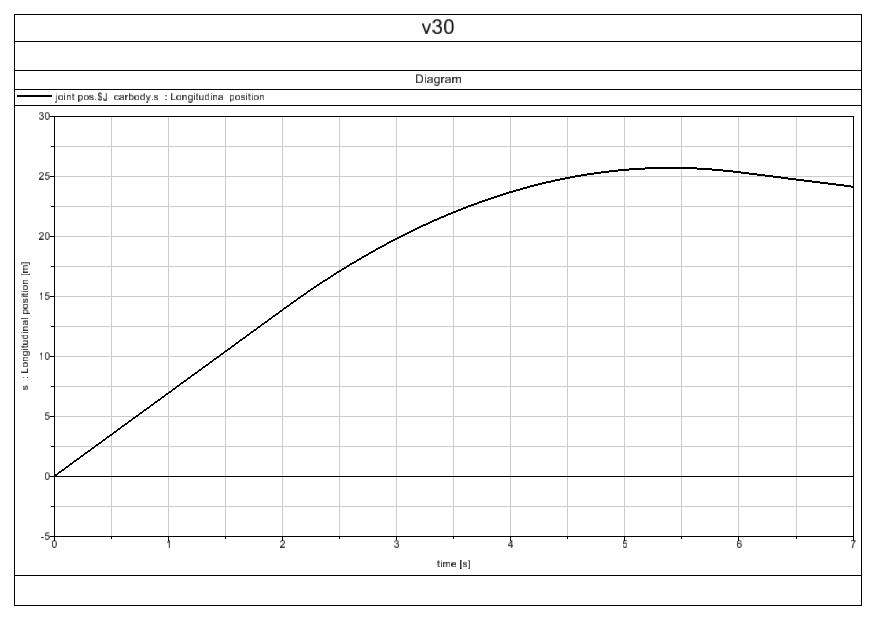
图2.15 制动工况下车辆速度 图2.16 制动工况下车辆运行距离
表2.5 车辆运行制动距离
车辆运行速度(km/h) | 匀速运行时间(s) | 制动运行时间(s) | 运行总距离(m) | 制动距离(m) |
25 | 2 | 3.38 | 25.70 | 11.84 |
由表2.5可知,车辆运行速度为25km/h-0km/h,车辆的制动距离为11.84未超过15m,满足车辆紧急制动要求。
3 结论
(1)车体的最大横向加速度0.964m/s2、垂向加速度1.551m/s2小于UIC518规定客车横向、垂向加速度均小于2.5m/s2速的要求,车体横向Sperling指标最大值为1.94、垂向Sperling指标最大值为2.24,均满足GB/T5599-1985规定Sperling小于2.5的要求,运行平稳。
(2)微轨车辆曲线通过性能较好,没有出现轮胎连续减载脱离路面的现象,吊杆橡胶提供较大的径向力使车辆驶出曲线后较快回正。车辆在转弯时和转弯后保持稳定。
(3)微轨车辆运行速度为25km/h-0km/h,车辆的制动距离为11.84未超过15m,满足车辆紧急制动要求。
黄华玮.悬挂式单轨交通最小曲线半径及曲线限速研究[J].铁道工程学报,2018(12):75-79.
[4] 李忠继,林红松,颜华,等.空轨列车系统横向运动稳定性研究[J].铁道科学与工程学报,2016(3):564—569.
[5] 冯尊委,楚永萍,何斌斌.悬挂式单轨列车关键悬挂参数研究[J].城市轨道交通研究,2017(8):41—44.

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



