1, 2, 3 广东科技学院,广东 东莞, 523083
摘要:随着智能化技术的快速发展,智能机器人系统在开始应用在机器人行业,就一直倍受社会的关注。自动行驶机器人已广泛应用于各种重要领域。本项目是基于STC89C52单片机,实现循迹、避障以及声控启动和电压检测等功能,硬件结构由主控、循迹、避障和声控模块电路组成,软件部分主要完成循迹避障和声控程序编写。本项目提高了机器人智能运行水平和安全性,很大程度上方便了人们,这是一个十分具有研究意义的课题。
关键词: 智能机器人; 循迹; 避障
相对过去的机器人而言,寻迹避障机器人具备良好的安全性和机动性,同时对周围环境的识别处理能力、规划与决策能力十分优越。适用性、实用性高,集自动行驶等功能于一体的综合系统[1]。以安全作为前提之下,代替人们自动地行驶,解放人们的大脑和双手,帮助人们驾驶轻松上路,这是一个十分具有研究意义的课题。
(1)以STC89C52型号单片机为核心,项目声控智能机器人的电机驱动电路以及控制电路,并利用红外光电传感器完成循迹模块项目,采用超声波传感器完成障碍物检测和避障模块项目。
(2)通过声音控制机器人的启动。
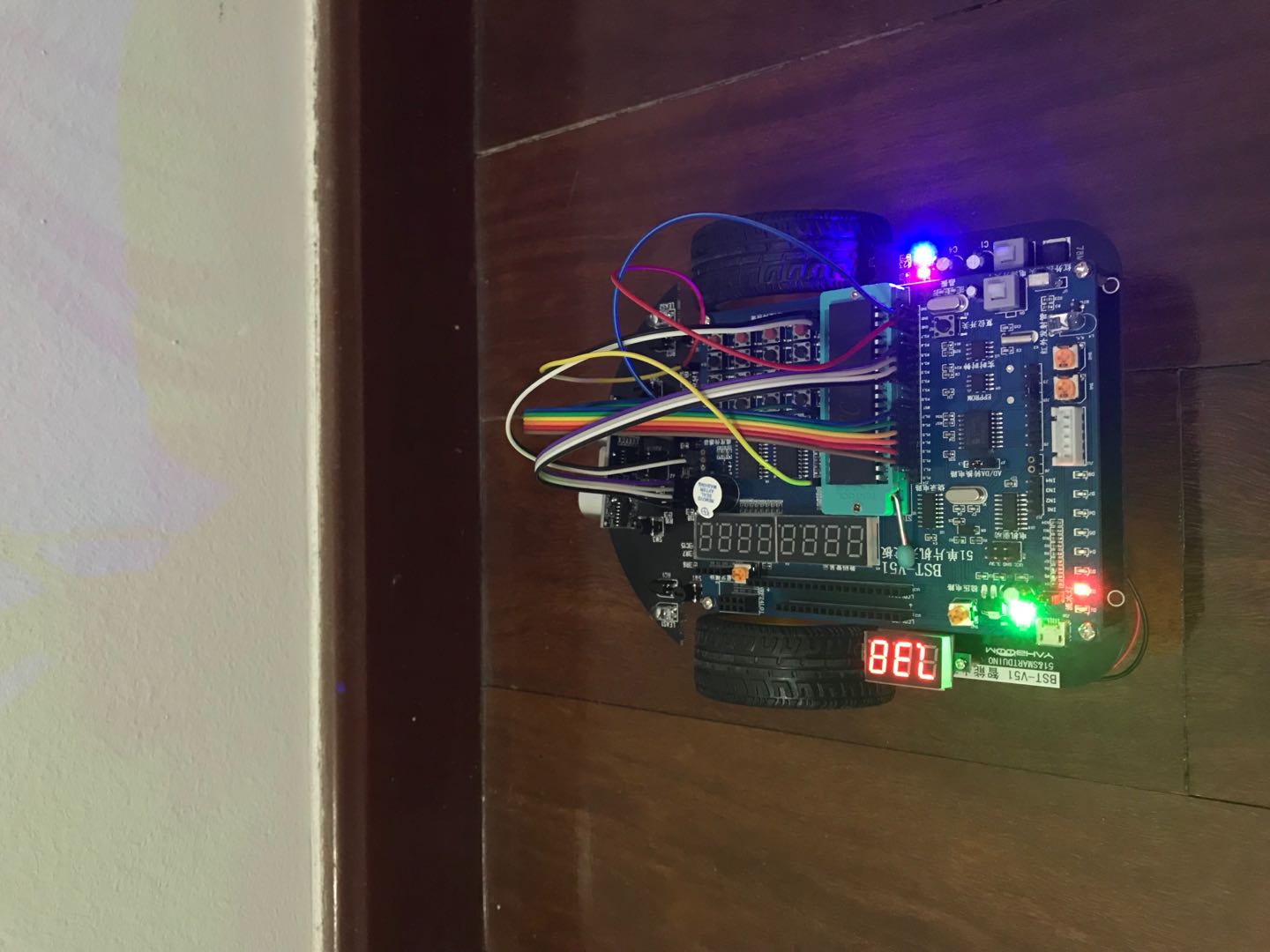
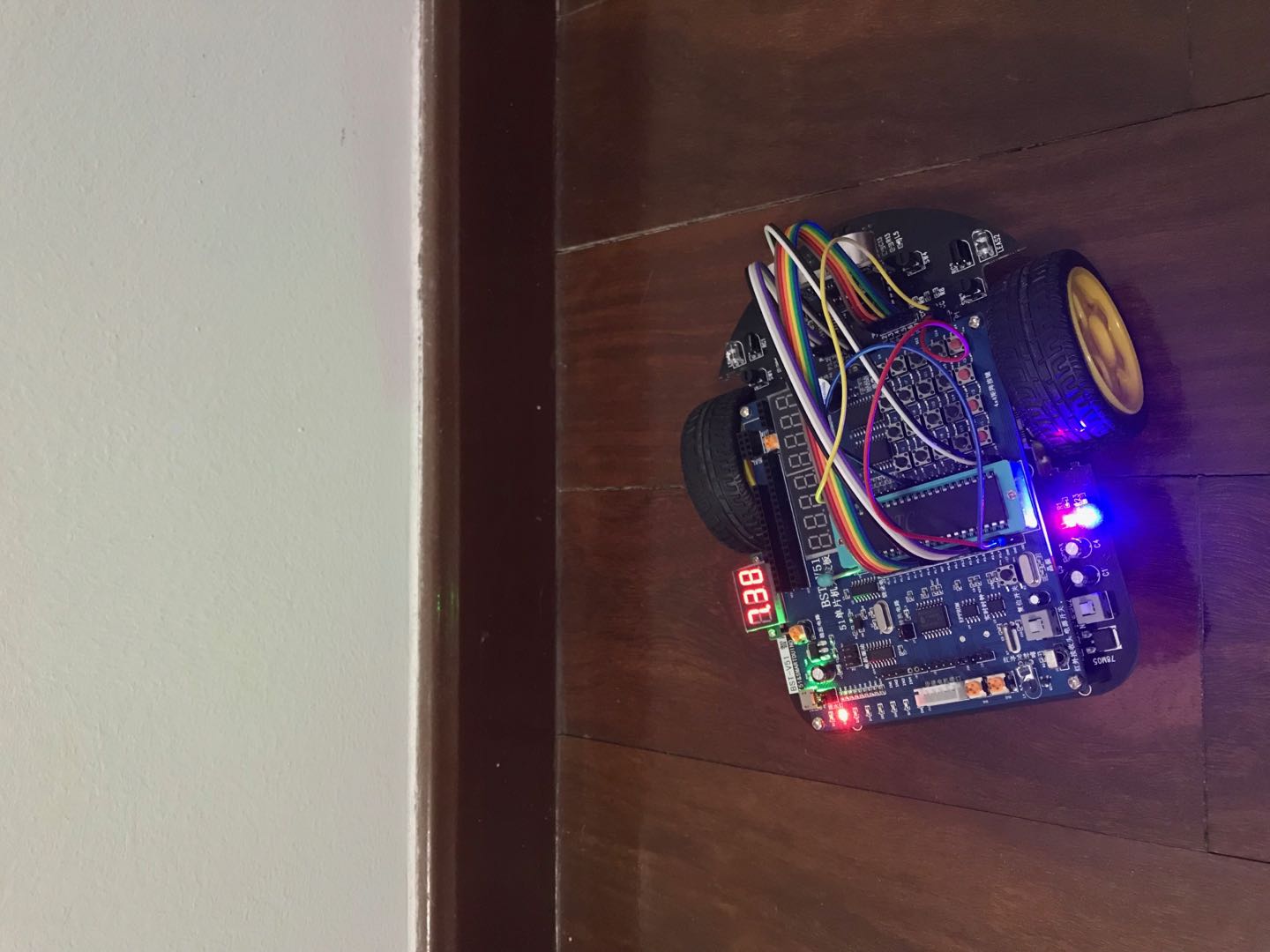
(3)通过LED实时监测机器人电压
而出于经济和项目方便的考虑,智能机器人的车轮数采用三轮,对于三轮智能机器人,左右两个为驱动轮,后轮则为万向轮,控制左右两个驱动轮的速度,形成转速差以使机器人转向,即使用差动控制转向。如图2.2所示为智能机器人的车体结构图。
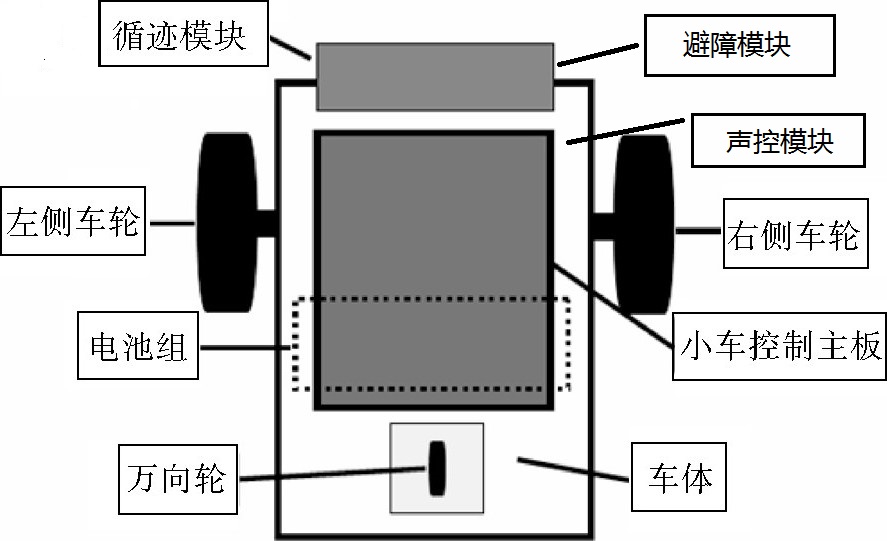
图2.2 整体结构图
采用超声波传感器对机器人运动过程中遇到的障碍物进行检测,然后把采集到的信号传送给主控系统处理。
距离测量的公式如下:
![]() (2.1)
(2.1)
式中:S—— 机器人与障碍物间距离;
C空—— 超声波在空气中的传播速度;
t—— 时间差(为发射与接收时间的一半)。
如图2.3所示为超声波传感器。
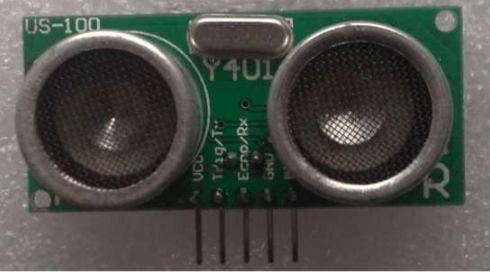
图2.3 超声波传感器
采用两只红外对管,分别放置在机器人车身前的两侧,根据两只光电开关接收和分析白线和黑线的情况以控制机器人转向从而调整机器人方向。
如图2.4所示为红外光电传感器。
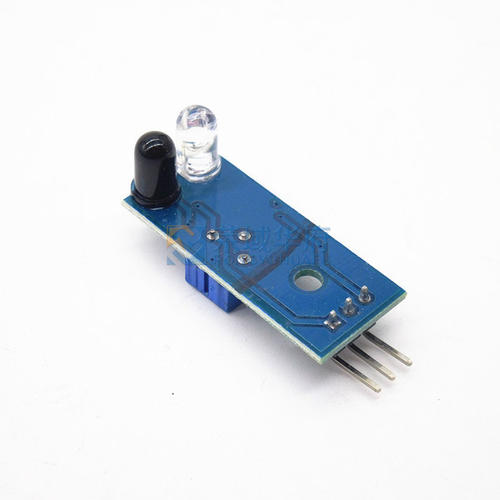
图2.4 红外光电传感器
硬件电路原理图如图3.1所示
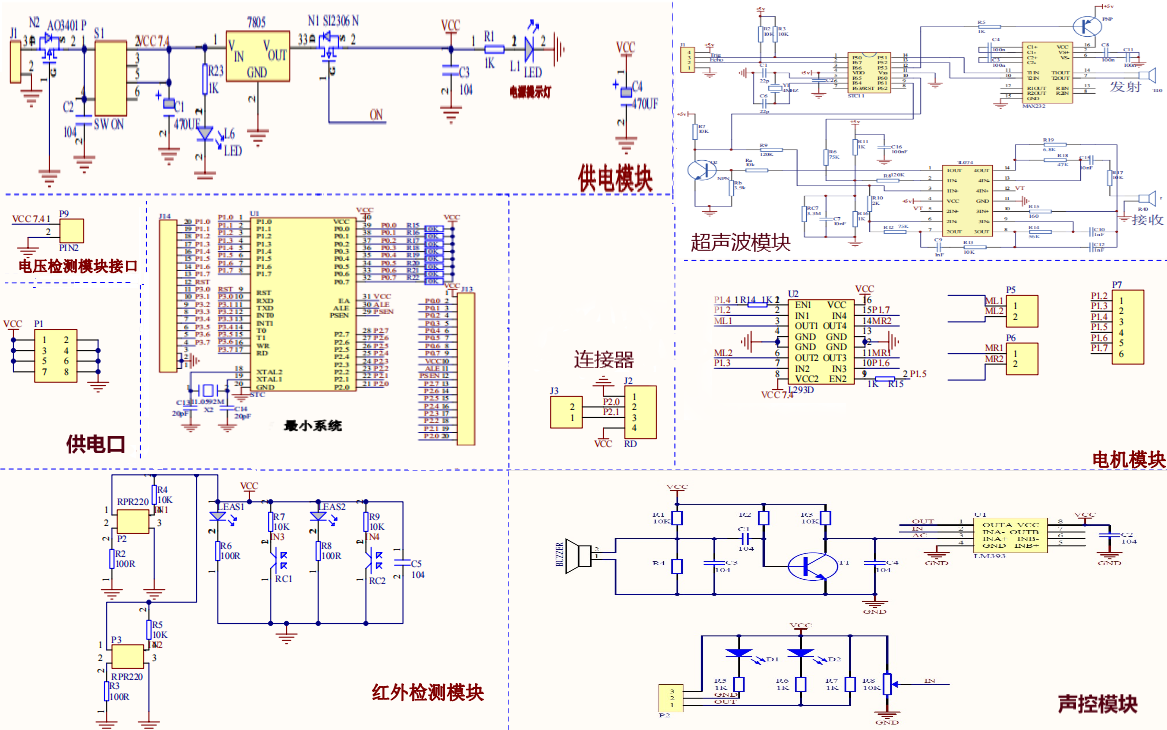
图3.1硬件电路原理图
本设计的整体系统程序设计流程图如图3.2所示
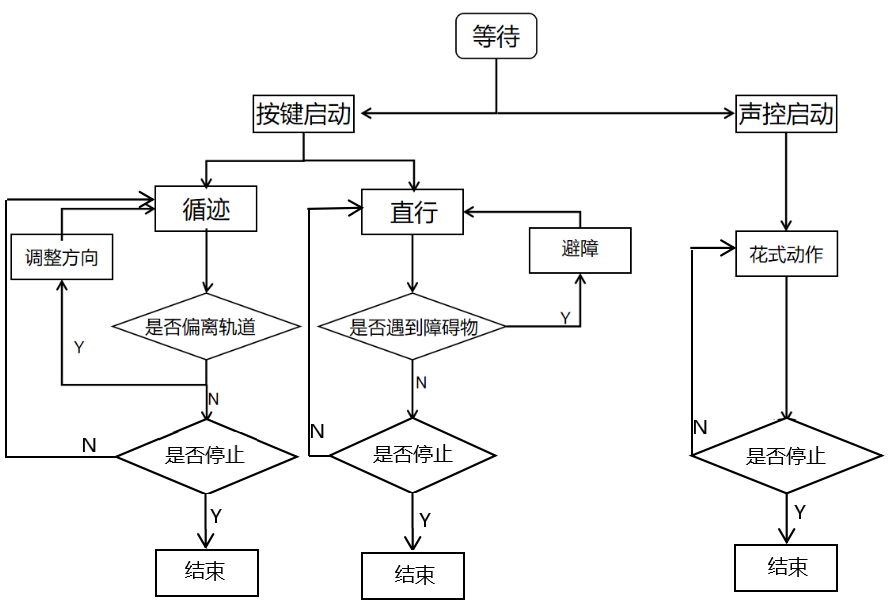
图3.2 系统主程序流程图
如图4.1为智能小车超声波避障全过程。图(a)中智能小车前方遇到障碍物时首先往后退,同时蜂鸣器报警,再调整方向,避开障碍继续行驶,蜂鸣器停止声响,如图(b)为转向过程。
调试的时候,尽量使小车工作在平滑的路面,如遇到小车避障过程中自行停下来的情况,很有可能是电池电量不足,应及时充电。
(a) (b)
图4.1超声波避障演示图
如图4.2所示,图(a)为小车循迹过程中的直线行驶,图(b)为小车在循迹过程中转弯,当小车向左方偏离轨道时,右红外光电传感器输出高电平,同时L2灯熄灭,小车通过调节两边电机转速产生转速差,使得小车重新驶回轨道上,L2灯重新点亮。
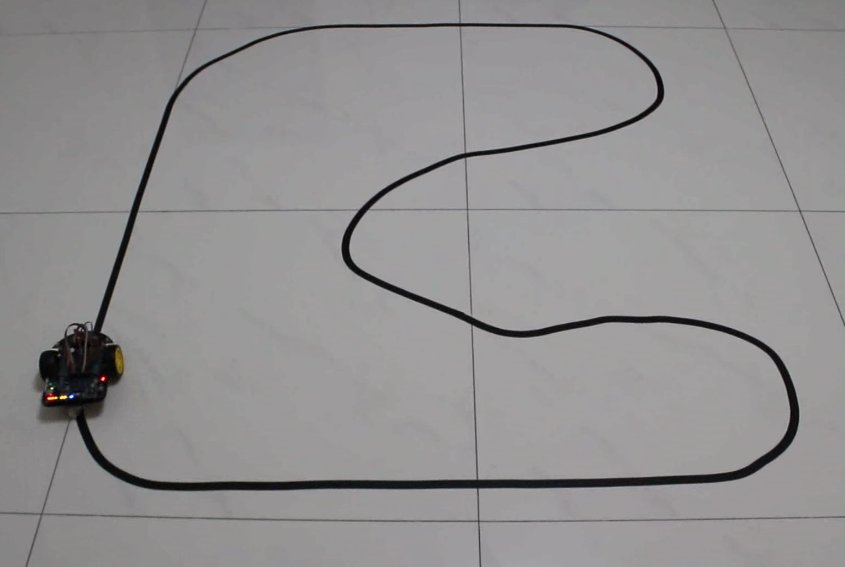

(a) (b)
图4.2 循迹演示
本项目通过调试、分析和测试实现了智能机器人的循迹、避障、声控等功能。综合项目了系统的软硬件,包括单片机的最小系统、L298D驱动电路及其系统调试、传感器的选型、机器人底板等。
本项目的智能机器人硬件系统的各个模块采用合理,经济且实用,基于C语言的控制软件高效可行,车辆的整体性能优异,自动循迹功能成功实现。
最后,通过这次的项目,让我意识到实践才是检验真理的唯一标准。其中,我也认识到了自己的不足,因为自身理论方面学得太浅,实践能力也较差,在项目制作中常常遇到挫折,也走过很多弯路,碰了多次壁,但最后还是通过不懈努力圆满解决了问题,最终实现了智能机器人的软硬件项目和调试,并且达到了预期的要求。
基金项目:2020年广东科技学院大学生创新创业训练计划项目省级:循迹避障机器人研究
刘志娴, 江敏, 阮玲玉. 基于51单片机智能机器人的项目与实现[J]. 电脑知识与技术, 2018, 14(21): 273-279.
王然升. 自动循迹智能小车的研究与实现[D]. 青岛科技大学, 2019.
何立波. 智能小车识别系统设计[D]. 湖南大学, 2016.
李明法, 李媛媛. 基于光流和超声波的智能小车障碍物检测系统[J]. 传感器与微系统, 2020, 39(08): 103-106.
高振新, 孙建红. 基于MSP430的智能循迹运料小车设计[J]. 实验室研究与探索, 2016, 35(08): 71-74+97.
1

客服QQ:30444492琼网文【2021】1550-113号
增值电信业务经营许可证:琼B2-20210322
出版物经营许可证:新出发龙华出字第(2021)009号
广播电视节目制作经营许可证:(琼)字第00779号
版权所有 ©2002-2024 期刊网(www.qikanchina.com) 琼ICP备2021005105号



